Изобретение относится к средствам обучения и тренировки, в частности к тренажерам для обучения управлению водными транспортными средствами.
Цель изобретения - повышение эффективности обучения.
На фиг. 1 представлена функциональная блок-схема предлагаемого тренажера; на фиг. 2 - функциональная схема блока моделирования изменения угловой скорости судна; на фиг. 3 - функциональная схема блока моделирования изменения курса судна} на фиг, 4 - функциональная схема блока моделирования рулевой системы.
Тренажер для обучения управления курсом судна содержит задатчик 1 ре- жрша движения, соединенный выходом с. входом блока 2 моделирования рулевого управления, выход которого подключен к одному из входов блока 3 моделирования изменения угловой скорости судна, другие входы которого соединены с задатчиком 4 возмущений и выходом блока 5 нерегулируемых возмущений, а выход - с входом блока 6 моделирования изменения курса судна, ВЫХОД которого соединен с блоком 7 автооценки и входом преобразователя 8, соединенного выходом с репитером 9 гирокомпаса.
Преобразователь 8 выполнен на элементах 10-12 задержки, элементах 13 и 14 выборки-хранения, умножителях 15 и 16, блоке 17 фазовой автоподстройки частоты и источнике 18 напряжения.
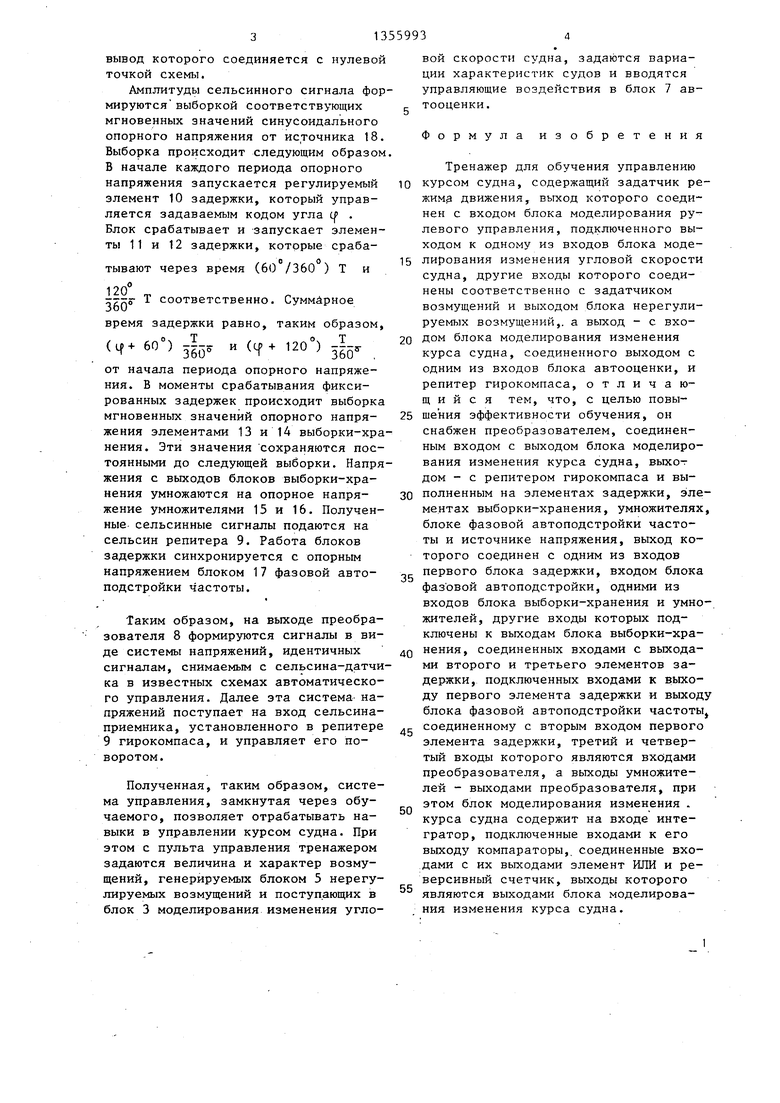
Блок 6 моделирования изменения курса судна содержит элемент ИЛИ 19, входы которого соединены с выходами компараторов 20 и 21, подключенных входами к выходам интегратора 22. Выходы компараторов 20 и 21 соединены с входами реверсивного счетчика 23.
Блок 3 моделирования изменения угловой скорости содержит интеграторы 24 и 25, сумматоры 26 и 27, за- датчики 28-34 коэффициентов передачи, инверторы 35, 36 и ограничитель 37.
Предлагаемый тренажер работает следующим образом.
Рулевой при обучении, обнаружив отклонение от заданного курса или выполняя команду на изменение курса, включает через задатчик 1 блок 2 моделирования рулевого управления. Сигнал, пропорциональный углу перекладки руля, воспринимается с выхода блока 2 блоком 3. Последний осуществляет интегрирование уравнений вращатель.ного движения судна з натуральном масштабе времени и формирует выходной сигнал, пропорциональный изменению угловой скорости судна.
С выхода блока 3 сигнал поступает на вход блока 6 моделирования изменения курса. Здесь на интервапе 22 сигнал, пропорциональный угловой скорости со , интегрируется с малой постоянной интегрирования и затем
5 проходит через компараторь 20, 21, которые через элемент ИЛИ 19 сбрасывают интегратор 22 раз, когда напряжение на его выходе достигает максимального поло: 1ителького (компа0 ратор 20) или отрицательного (компаратор 21) значения. Таким образом,- на выходах компараторов 20 и 21 формируются импульсы, частота которых пропорциональна угловой скорости. Реверсивный счетчик 23 производит суммирование импульсов. Каждый раз при его переполнении происходит по естественному принципу действия счетчика мгновенный сброс в нуль.
При переходе через нулевое состояние счетчика при уменьшении угла происходит его мгновенное заполнение. Тем самым осуществляется циклическое интегрирование угловой скорости в
5 цифровом виде в диапазоне от О до 1°
С выхода блока б моделирования изменения курса сигнал поступает на вход цифросельсинного преобразоватеQ ля 8, который преобразует угол,представленный двоичным кодом, в постоянные напряжения, пропорциональные амплитудам сельсинных сигналов, и затем формирует сельсинные сигналы
как произведения этих постоянных напряжений на синусоядальное опорное напряжение, В данном преобразователе формируются относительно нулевой точки схемы два сельс: -11нных сигнала:
и, А, sin (cf + 60°). sin |- t-,
Уг
U А. sin (ц + 120°) .sin I t,
5 где A - постоянная;
Ч - задаваемый угол, град; Т - период опорного напряжения. Эти сигналы подаются на два выхода синхронизации сгльсина, третий
вывод которого соединяется с нулевой точкой схемы.
Амплитуды сельсинного сигнала формируются выборкой соответствующих мгновенных значений синусоидального опорного напряжения от источника 18. Выборка происходит следующим образом
8начале каждого периода опорного напряжения запускается регулируемый элемент 10 задержки, который управляется задаваемым кодом угла tl . Блок срабатывает и запускает элементы 11 и 12 задержки, которые срабатывают через время (60 /360 ) Т и
120
гтгг Т соответственно. Суммарное
JoO
время задержки равно, таким образом, (Cf.60°) з|о- и (с. 120°) -|-.
от начала периода опорного напряжения. В моменты срабатывания фиксированных задержек происходит выборка мгновенных значений опорного напряжения элементами 13 и 1Д выборки-хранения. Эти значения сохраняются постоянными до следующей выборки. Напряжения с выходов блоков выборки-хранения умножаются на опорное напряжение умножителями 15 и 16. Полученные- сельсинные сигналы подаются на сельсин репитера 9. Работа блоков задержки синхронируется с опорным напряжением блоком 17 фазовой автоподстройки частоты.
Таким образом, на выходе преобразователя 8 формируются сигналы в виде системы напряжений, идентичных сигналам, снимаемым с сельсина-датчика в известных схемах автоматического управления. Далее эта система напряжений поступает на вход сельсина- приемника, установленного в репитере
9гирокомпаса, и управляет его поворотом.
Полученная, таким образом, система управления, замкнутая через обучаемого, позволяет отрабатывать навыки в управлении курсом судна. При этом с пульта управления тренажером задаются величина и характер возмущений, генерируемых блоком 5 нерегулируемых возмущений и поступающих в блок 3 моделирования изменения угловой скорости судна, задаются вариации характеристик судов и вводятся управляющие воздействия в блок 7 автооценки.
Формула изобретения
Тренажер для обучения управлению
курсом судна, содержащий задатчик режима движения, выход которого соединен с входом блока моделирования рулевого управления, подключенного выходом к одному из входов блока моде5 лирования изменения угловой скорости судна, другие входы которого соединены соответственно с задатчиком возмущений и выходом блока нерегулируемых возмущений,, а выход - с вхо0 дом блока моделирования изменения курса судна, соединенного выходом с одним из входов блока автооценки, и репитер гирокомпаса, отличающийся тем, что, с целью повы5 шения эффективности обучения, он снабжен преобразователем, соединенным входом с выходом блока моделирования изменения курса судна, выходом - с репитером гирокомпаса и вы0 полненным на элементах задержки, элементах выборки-хранения, умножителях, блоке фазовой автоподстройки частоты и источнике напряжения, выход которого соединен с одним из входов первого блока задержки, входом блока фазовой автоподстройки, одними из входов блока выборки-хранения и умножителей, другие входы которых подключены к выходам блока выборки-храQ нения, соединенных входами с выходами второго и третьего элементов задержки, подключенных входами к выходу первого элемента задержки и выходу блока фазовой автоподстройки частоты
g соединенному с вторым входом первого элемента задержки, третий и четвертый входы которого являются входами преобразователя, а выходы умножителей - выходами преобразователя, при этом блок моделирования изменения . курса судна содержит на входе интегратор, подключенные входами к его выходу компараторы,, соединенные входами с их выходами элемент ИЛИ и реверсивный счетчик, выходы которого являются выходами блока моделирования изменения курса судна.
5
0
5
(pus.2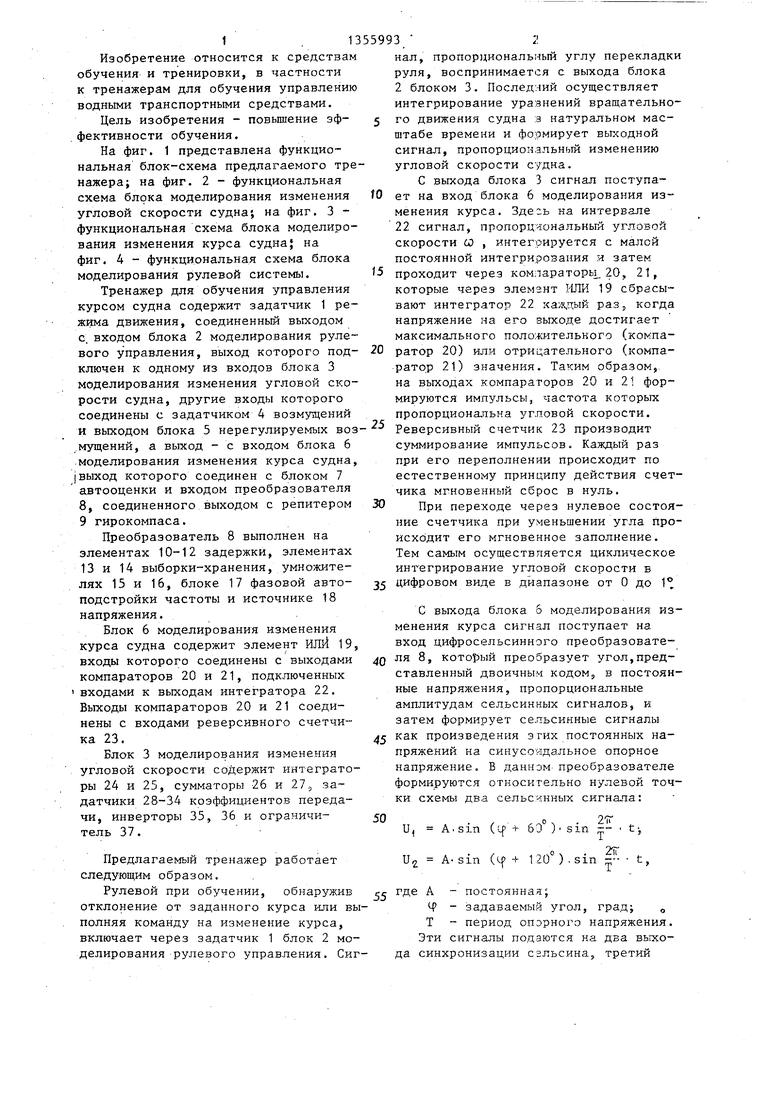
| название | год | авторы | номер документа |
|---|---|---|---|
| Аудиторный тренажер рулевого | 1972 |
|
SU578650A1 |
| Аудиторный тренажер по управлению курсом судна | 1975 |
|
SU555733A1 |
| Тренажер сварщика | 1988 |
|
SU1550571A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| Устройство автоматического управления курсом судна | 1989 |
|
SU1716485A1 |
| Тренажер сварщика | 1984 |
|
SU1374271A1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Устройство для управления курсом судна | 1984 |
|
SU1227546A1 |
| Тренажер по тактике парусных гонок | 1981 |
|
SU1015417A1 |


Изобретение относится к средствам обучения и тренировки. Цель изобретения - повьппение эффективности обучения. Тренажер содержит задатчик 1 режима движения, соединенный с входом блока 2 моделирования рулевого rUJ Н управления, сигнал- с выхода которого воспринимается блоком 3 моделирования изменения угловой скорости судна, а с выхода блока 3 поступает на блок 6 моделирования изменения курса судна. Преобразователь 8, вход которого соединен с выходом блока 6, преобразует угол, выраженный двоичным кодом, в постоянное напряжение, пропорциональное амплитудам сельсинных сигналов, и затем формирует сельсин- ные сигналы как произведения постоянных напряжений на синусоидальное опорное напряжение. Такое вьтолнение тренажера обеспечивает расширение диапазона изменения моделируемого угла курса судна; 4 ил. r--fS n 1 . ш. о СО в ZDJ as,f
0/п$л.Ъ
сриаЗ
Составитель Л.Резникова Редактор И.Рыбченко Техред И.Попович Корректор И.Эрдейи
Заказ 5796/43 Тираж 433Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фигЛ
| Аудиторный тренажер рулевого | 1972 |
|
SU578650A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
