Известны судовые авторулевые, содержащие датчики гирокомпасов с сельсинами курсов репитера, градусные шкалы репитера грубого и точного отсчетов, интеграторы и исполиктельные. силовые электроприводы руля.
Особенность описываемого авторулевого состоит в том, что сельсин курса репитера кинематически соединен с сельсином датчика курсового сигнала, электрически присоединенного к обмотке суммирующего трансформатора и посредством фазозависимого выпрямителя и интегратора - к силовому электронриводу поворота руля, снабженному датчиком рулевого указателя (аксиометра) со встроенной на оси последнего стрелкой шкалы репитера.
Такой судовой авторулевой компактнее известных и надежнее в действии.
Для уменьшения количества рабочих включений на перекладку руля при незначительных периодических колебаниях судна относительно курсовой линии интегратор выполнен с газоразрядной лампой и накопительным конденсатором, электрически присоединенным к выходному реле включения электрических цепей исполнительного силового электропривода руля.
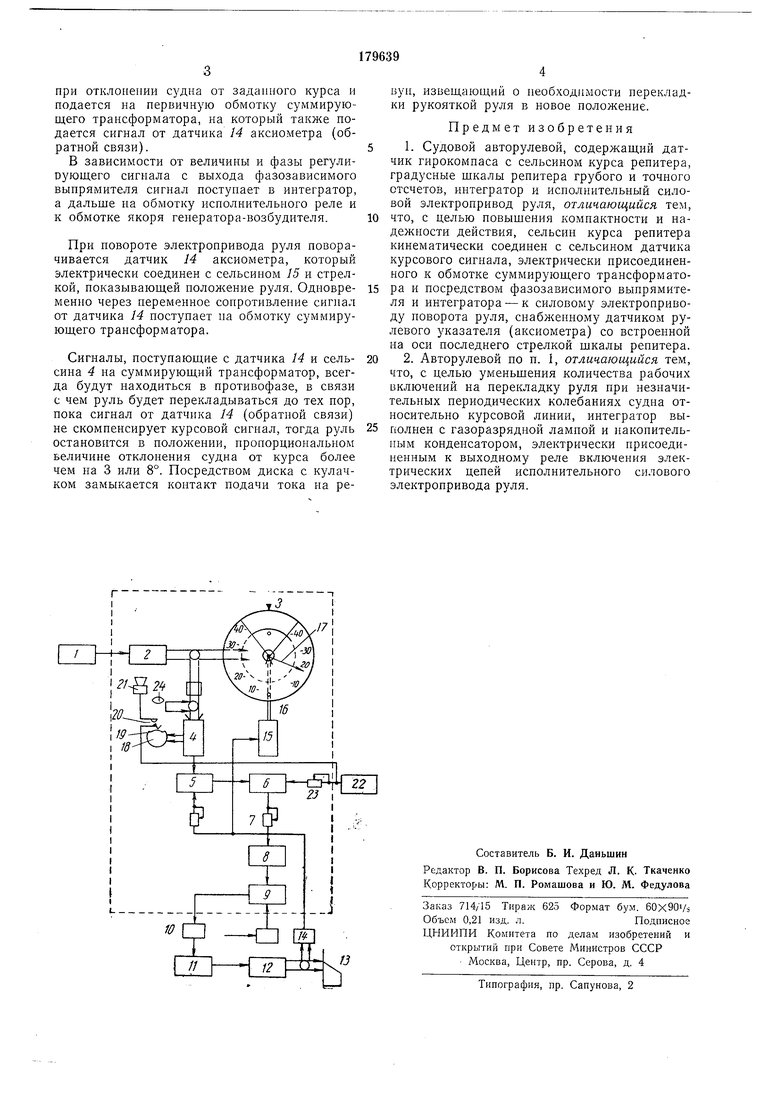
Датчик гирокомпаса / электрически соединен с сельсином 2 курса репитера, который механически присоединен к шкале 3 точного и грубого отсчета репитера и к сельсину 4 5 датчика курсового сигнала.
Сельсин 4 электрически присоедипен к первичной обмотке суммирующего трансформатора 5, а вторичная обмотка трансформатора присоединена к фазозависимому выпрямителю
0 6, переменнохму сонротивлению 7, интегратору 8, иснолнительному реле 9 и через переключатель 10 к обмотке якоря генератора-возбудителя 11. Якорь генератора-возбудителя электрически присоединен к рулевому двигателю
5 12, который кинематически связан, с рулем 13 и датчиком 14 рулевого указателя (аксиометром). Датчик 14 электрически присоединен к сельсину 15, на оси 16 которого встроена стрелка 17 шкалы репитера.
0 Сельсин 4 механически присоединен к диску 18, который при повороте своим кулачком 19 замыкает контакт 20 ревуна 21. Усилитель 22 .гирокомпаса посредством переменного сопротивления 23 электрически присоединен к
5 фазозависимому выпрямителю. Авторулевой снабжается рукояткой 24 установки руля в новую диаметральную плоскость. при опйтоиепии судна от заданного курса и подается на первичную обмотку суммирующего трансформатора, на который также подается сигнал от датчика 14 аксиометра (обратной связи). В зависимости от величины и фазы регулирующего сигнала с выхода фазозависимого выпрямителя сигнал поступает в интегратор, а дальше на обмотку исполнительного реле и к обмотке якоря генератора-возбудителя. При повороте электропривода руля поворачивается датчик 14 аксиометра, который электрически соединен с сельсином 15 и стрелкой, показывающей пололсение руля. Одновременно через переменное сонротивленне сигнал от датчика 14 поступает па обмотку суммирующего трансформатора. Сигналы, поступающие с датчика 14 и сельсина 4 на суммирующий трансформатор, всегда будут находиться в противофазе, в связи с чем руль будет перекладываться до тех пор, пока сигнал от датчика 14 (обратной связи) не скомпенсирует курсовой сигнал, тогда руль остановится в полол енин, пропорциональном величине отклонения судна от курса более чем на 3 или 8°. Посредством диска с кулачком замыкается контакт подачи тока на ревун, извещающий о необходимости перекладки рукояткой руля в новое положение. Предмет изобретения 1. Судовой авторулевой, содержащий датчик гирокомпаса с сельсином курса репитера, градусные шкалы репитера грубого и точного отсчетов, интегратор и исполнительный силовой электропривод руля, отличающийся тем, что, с целью повышения компактности и надежности действия, сельсин курса репитера кинематически соединен с сельсином датчика курсового сигнала, электрически присоединенного к обмотке суммирующего трансформатора и посредством фазозависнмого выпрямителя и интегратора - к силовому электроприводу поворота руля, снабженному датчиком рулевого указателя (аксиометра) со встроенной на оси последнего стрелкой щкалы репитера. 2. Авторулевой по п. 1, отличающийся тем, что, с целью уменьшения количества рабочих включений на перекладку руля при незначительных периодических колебаниях судна относительно курсовой линии, интегратор выполнен с газоразрядной лампой и накопительным конденсатором, электрически присоединенным к выходному реле включения электрических цепей исполнительного силового электропривода руля.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОРУЛЕВОЙ | 1962 |
|
SU147104A1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Аудиторный тренажер рулевого | 1972 |
|
SU578650A1 |
| АВТОРУЛЕВОЙ, РЕАЛИЗУЮЩИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН УПРАВЛЕНИЯ | 1968 |
|
SU213943A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
