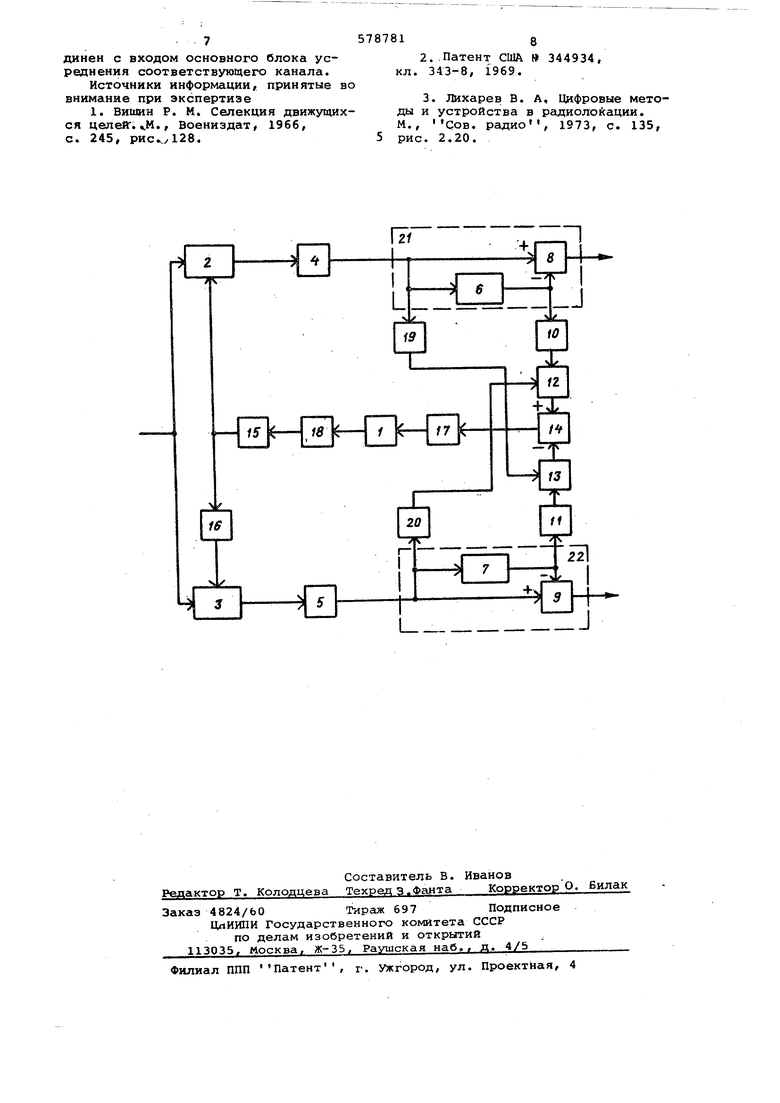
ется на сигнал ошибки с последующих элементов разрешения по дальности. Наиболее близким по технической сущности к предлагаемому изобретени является устройство для подавления пассивных помех, содержащее накопитель, два канала, каждый из. которых содержит последовательно включенные фазовый детектор, аналого-цифровой преобразователь, блок памяти, сумматор, второй вход которого соединен с выходом аналого-цифрового преобразователя, и последовательно включенные основной блок усреднения и перемножитель, причем выход перем жителя каждого из каналов соединен с соответствующим входом блока вычитания, выход гетеродина соединен с первым входом фазового детектора первого .канала непосредственно, с первым входом фазового детектора второго канала через фазовращатель, а вторые входы фазовых детекторов соединены.между собой 3. Такое УСТРОЙ.СТВО яв.пяется устрой ством однократной черезпериодной компенсации с корреляционными обрат ными связями, в котором с помощью умножителей и усредняющих устройств определяется комплексный коэффициен междупериодной корреляции помехи, на который и умножаются в каждом из каналов перед поступлением в сум матор незадержанные величины. Однак известное устройство не обеспечивае полной компенсации допплеровской скорости помехи, так как осуществляе только попарную -компенсацию допплеровского сдвига фазы помехи между двумя смежными периодами. Цель изобретения - увеличение компенсации допплеровской скорости помехи. Для этого в предлагаемое устройство для подавления пассивных помех и введены весовой блок, цифроаналоговый преобразователь и по одному дополнительному, блоку усреднения в каждый из каналов при этом вы ход аналого-цифрового преобразователя Кс1ждого из каналов через соответствующий дополнительный блок усреднения соединен с вторым входом перемножителя другого канала, выход блока вычитания через весовой блок соединен с входом накопителя, выход которого через цифроаналоговый преобразователь соединен с упра ляющим входом гетеродина,а выход блока памяти каждого из каналов со динен с входом основного блока уср днения соответствующего канала. На чертеже представлена структурная электрическая схема предлагаемого устройства. Устройство состоит из накопител 1, двух каналов, каждый из которых содержит последовательно включенны фазовый детектор 2 (3), аналого-циф ровой преобразователь 4 (5), блок 14 6(7) памяти и сумматор 8(9), второй вход которого соединен с выходом налого-цифрового преобразователя (5), и последовательно включенные сновной блок 10(11) усреднения и перемножитель 12(13), причем выход перемножителя каждого из каналов соединен с соответствующим входом блока 14 вычитания, выход гетеродина 15соединен с первым входом фазового детектора 2 непосредственно, с первнм входом фазового детектора 3 второго канала через фазовращатель 16а вторые входы фазовых детекторов 2 и 3 соединены-между собой, кроме того, устройство содержит весовой блок 17, цифрраналоговый преобразователь 18 и по одному дополнительному блоку 19(20) усреднения в каждом из каналов, при этом выход аналого-цифрового преобразователя 4(5) каждого из каналов через соответствующий дополнительный блок 19 (20) усреднения соединен с вторым входом перемножителя 13(12) другого канала, выход блока 14 вычитания через весовой блок 17 соединен с входом накопителя 1, выход которого через цифроаналоговый преобразователь 18 соеди-нен с управляющим входом гетеродина 15, а выход блока 6(7) памяти каждого из каналов соединен с входом основного блока 10(11) усреднения соответствующего канала. Устройство для подавления пассивных помех работает следующим образом. Квадратурные составляющие полезного сигнала и пассивной помехи или только одной помехи с выходов фазовых детекторов 2 и 3 поступают в аналого-цифровые преобразователи 4 и 5 где квантуются по времени и амплитуде, в результате чего в каждом элементе разрешения по дальности образуется М-разрядное кодовое слово. Если помеха не имеет допплеровской или иной какой-либо модуляции, то на выходе черезпериодных компенсаторов 21, 22, каждый из которых содержит блок памяти и сумматор, она подавляется. Если же источник помехи движется, то квадратурные составл Ж)Щие помехи оказываются промодулированньами с .частотой допплера и черезпериодными компенсаторами 21, 22 практически не подавляются. Компенсация допплеровской скорости осуществляется путем автоподстройки частоты опорного колебания фазовых детекторов 2, 3. С этой целью цифровые коды с выхода аналого-цифровых преобразователей 4, 5 и блоков 6, 7 памяти поступают в блоки 10, 11 и 19, 20 усреднения , в которых осуществляется накопление помехи с нескольких смежных элементов разрешения по дальности.
что позволяет исключить влияние сигнала от движущейся цели, занимающего в отличие от протяженной помехи один элемент разрешения по дальности. При этом на выходах (блоков 19, 20 усреднения образуются величины, соответствующие текущему зондированию, а на выходах блоков 10, 11 усреднения -предыдущему зондированию, т. е. задержанные на период повторения. Незадержанные величины одного квадратурного канала и задержанные величины другого квадратурного канала и наоборот попарно перемножаются в перемножителях 12 13, На выходе блока 14 вычитания образуется разность этих произведений. Поскольку задержанные и незадержанные величины соответственно на выходах блоков 10 11 и 19, 20 усреднения несут информацию о доппларовской модуляции помехи, то
на выходе блока 14
величина А.,
вычитания оказывается пропорциональной допплеровскому сдвигу Т„ фазы помехи за период повторения Т:
Лк зшЗЯТдТ ,
где V - амплитуда помехи.
В весовом блоке 17 величина А подвергается умножению на весовой коэффициент, величина которого влияет на динамические свойства и флуктуационную ошибку автоподстройки частоты опорного сигнала. Введение весовой функции позволяет обеспечит на первых тактах безынерционную работу устройства по отношению к регулярной составляющей допплеровской скорости помехи и уменьшить флуктуадионную ошибку на последующих тактах работы. При этом изменение-весовых коэффициентов должно быть согласовано с началом поступления помехи в устройство.Последнее предполагает, что этот начальный момент либо известен заранее, либо фиксируется специальным устройством. Практически зафиксировать момент поступления помехи не всегда представляется возможным, особенно в системах снепрерывным (линейным) сканированием антенного луча. В это случае необходимо устанавливать постоянное значение весового коэффициента, выбираемого из условия обеспечения заданной флуктуацирнной ошибки. При этом по отношению к регулярной составляющей устройство становится инерционным. Влияние инеционности на работу устройства, будет меньшим, если в накопителе 1 взвешенные величины А накапливаются вдоль развертки по дальности Тогда уже в течение второго зондирования обеспечивается компенсация допплеровской скорости помехи. При дискретном сканировании антенного луча накопление необходимо производить раздельно по каждому элементу или группе элементов разрешения по дальности с последующим раздельньм хранением накопленных сумм в ячейках памяти накопителя 1. В цифроаналоговом преобразователе 18 5 поступающие с накопителя 1 суммы преобразуются в постоянное напряжение, которое поступает на перестраиваемый гетеродин 15 и осуществляет перестройку частоты опорного
0 .колебания фазовых детекторов 2, 3 пропорционально поступающим с на- . копителя 1 суммам. При соответствующем выполнении накопителя 1 частоты опорных колебаний перестраиваются также раздельно по каждому элементу или группе элементов разрешения по дальности, что позволяет отслеживать изменения допплеровской скорости помехи по дальности.
0
Таким образом, предлагаемое устройство позволяет осуществить полную компенсацию допплеровской скорости помехи, что упрощает задачу последующего режектирования помехи
5 путем подключения дополнительных режекторных- фильтров, поскольку остатки помехи на аыходе устройства не содержат допплеровской модуляции.
0 Формула изобретения
Устройство для подавления пассивных помех, содержащее накопитель, два канала,из которых содержит последовательно включенные фазовый
5 детектор, аналого-цифровой преоб-разовахель, блок памяти, сумматор, второй вход которого соединен с выходом аналого-цифрового преобразователя, и последовательно включенные, основной блок усреднения и перемно0житель, причем выход перемножителя каждого из каналов соединен с соответствующим входом блока вычитания, выход гетеродина соединен с первым входом фазового детектора первого
5 канала непосредственно, с первым входом фазового детектора второго канала через фазовращатель а вторые входы фазовых детекторов соединены между собой, отличающее0 с я тем, что, с целью увеличения компенсации ;§эпплеровской скорости помехи, введены весовой блок, цифроаналоговый преобразователь и по одному дополнительному блоку
5 усреднения в каждый из каналов, при этом выход аналого-цифрового преобразователя каждого из каналов через соответствующий дополнительный блок усреднения соединен с вторым входом
Q перемножителя другого канала, выход блока вычитания через весовой блок соединен с входом накопителя, выход которого через цифроаналоговый преобразователь соединен с управг ляющим входом гетеродина, а выход
блока памяти каждого из каналов соединен с входом основного блока усреднения соответствующего канала.
Источники информации, принятые во внимание при экспертизе
1. Вишин Р. М. Селекция движущихся целей. vM., Воениэдат, 1966, с. 245, рис.,/128.
578781g
2..Патент США 344934, кл. 343-8, 1969.
3. Лихарев В. А, Цифровые методы и устройства в радиолокации. М., Сов. радио, 1973, с. 135, рис. 2.20.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подавления пассивных помех | 1977 |
|
SU687941A2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛА | 2012 |
|
RU2498343C1 |
| Цифровое устройство для подавления пассивных помех | 1977 |
|
SU743208A1 |
| Цифровое устройство для подав-лЕНия пАССиВНыХ пОМЕХ | 1979 |
|
SU809018A1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2409822C1 |
| УСТРОЙСТВО ЦИФРОВОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1977 |
|
SU778514A2 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1977 |
|
SU711849A1 |
| ЦИФРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1974 |
|
SU1839793A1 |
| УСТРОЙСТВО ЦИФРОВОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1990 |
|
SU1818989A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ДОППЛЕРОВСКОЙ ЧАСТОТЫ | 1989 |
|
SU1840026A1 |
