Изобретение относится к области радиолокации и может быть использовало в бортовых радиолокационных импульсно-допплеровских комплексах. В случае установки РЛС на борту обнаружение целей, например низколетящих самолетов, ракет, производится на фоне пассивных помех, вызванных отражениями от поверхности моря и земли. При этом источники мешающих отражений на поверхности земли перемещаются относительно носителя.
Для обеспечения максимальной режекции отражений от подстилающей поверхности необходимо совместить центр спектра помех с областью максимальной режекции частотной характеристики устройства селекции движущихся целей (СДЦ) [1]. Этого можно добиться смещением промежуточной или несущей частоты радиолокационного сигнала на величину, равную средней частоте спектра помех, т.е. компенсацией допплеровской частоты, содержащейся в эхосигнале и связанной с движением носителя и вращением антенной системы. Наличие погрешности компенсации приводит к тому, что часть полосы пропускания фильтра СДЦ, перекрываемая спектром помех, увеличивается, и коэффициент улучшения системы СДЦ уменьшается.
Устройство, взятое за прототип [2] и предназначенное для компенсации допплеровской частоты, возникающей в эхосигнале, входит в состав импульсно-допплеровской РЛС, размещенной на движущемся носителе. Устройство содержит цепь двойного преобразования частоты сигнала когерентного гетеродина, включенную между выходом когерентного гетеродина и входом фазового детектора приемника, и сигнальный процессор, в котором формируются выходные сигналы с частотами fd и fg, поступающие на смесители устройства двойного преобразования частоты, содержащий опорный гетеродин, сигнал которого проходит последовательно через две цепи фазовой автоподстройки, управляемые таким образом, что разность частот fd и fg выходных сигналов сигнального процессора равна допплеровской частоте эхосигнала, вызываемой движением РЛС. Информация о значении скорости РЛС в пересчете на допплеровскую частоту в проекции на главный луч антенны поступает на сигнальный процессор извне в виде 8-разрядного цифрового кода Sx. Значения кода Sx вычисляются в смежных устройствах носителя с использованием информации о скорости, полученной с навигационных приборов. Выходные сигналы сигнального процессора с частотами fd и fg поступают на входы смесителей цепи двойного преобразования частоты, и в опорном напряжении фазового детектора возникает частотный сдвиг, равный допплеровской частоте, вызываемой движением РЛС. Этот же сдвиг содержится в эхосигнале, поступающем с антенной системы через приемное устройство на сигнальный вход фазового детектора. На выходе фазового детектора, таким образом, допплеровский сдвиг компенсируется с погрешностью, с которой устанавливается разность частот fd и fg в сигнальном процессоре. Погрешность компенсации будет определяться, в основном, погрешностью исходных данных, т.е. ценой младшего разряда 8-разрядного цифрового кода Sx; например, при скорости носителя порядка 500 км/час цена младшего разряда будет составлять 8 Гц.
Задача, решаемая в данном изобретении, - компенсация допплеровской частоты, возникающей в эхосигнале, отраженном от подстилающей поверхности, при движении РЛС, расположенной на носителе, при этом информация о значении этой частоты извлекается непосредственно из эхосигналов, что позволяет повысить достоверность полученных результатов и уменьшить погрешность компенсации.
Целью настоящего изобретения является уменьшение погрешности компенсации допплеровской частоты за счет использования анализа частотного спектра эхосигнала и извлечения непосредственно из него информации о допплеровской частоте, возникающей при движении носителя. Поставленная цель достигается тем, что в известное устройство, взятое за прототип, содержащее цепь двойного преобразования опорной частоты фазового детектора, состоящую из последовательно включенных первого смесителя, первого фильтра, второго смесителя, второго фильтра и усилителя, выход которого является выходом всего устройства и соединен со входом опорного напряжения фазового детектора, введено устройство формирования управляющего напряжения, первый гетеродин и второй гетеродин, причем выход первого гетеродина соединен со вторым входом первого смесителя, выход второго гетеродина - со вторым входом второго смесителя, выход устройства формирования управляющего напряжения соединен с управляющим входом первого гетеродина, а вход устройства формирования управляющего напряжения служит для подключения выходов аналого-цифрового преобразователя импульсно-допплеровской РЛС, при этом формирователь управляющего напряжения содержит два параллельных канала, каждый из которых состоит из последовательно соединенных допплеровского фильтра, детектора и интегратора, причем частотные характеристики фильтров в каналах смещены на  относительно нуля допплеровских частот, где fп - частота повторения зондирующих импульсов РЛС, а выходы интеграторов соединены раздельно со входом устройства вычисления разности и максимального из интегральных значений, а выходы этого устройства соединены раздельно с делителем разности на максимальное значение, выход которого соединен со входом преобразователя код-аналог, выход которого подключен к управляющему входу первого гетеродина. Анализ с прототипом указывает на наличие новых блоков и функциональных связей, что подтверждает соответствие критерию изобретения "новизна".
относительно нуля допплеровских частот, где fп - частота повторения зондирующих импульсов РЛС, а выходы интеграторов соединены раздельно со входом устройства вычисления разности и максимального из интегральных значений, а выходы этого устройства соединены раздельно с делителем разности на максимальное значение, выход которого соединен со входом преобразователя код-аналог, выход которого подключен к управляющему входу первого гетеродина. Анализ с прототипом указывает на наличие новых блоков и функциональных связей, что подтверждает соответствие критерию изобретения "новизна".
Сравнение предлагаемого технического решения с другими техническими решениями показывает, что известны амплитудно-частотные характеристики эхосигналов, принятых движущейся РЛС [1], однако использование этой зависимости для повышения точности компенсации допплеровской частоты, вызываемой движением РЛС, в предложенной совокупности с другими признаками, по мнению авторов, используется впервые и позволяет сделать вывод о соответствии предлагаемого решения критерию изобретения "существенное отличие".
Сущность изобретения будет понятна из приведенных описаний и графических материалов.
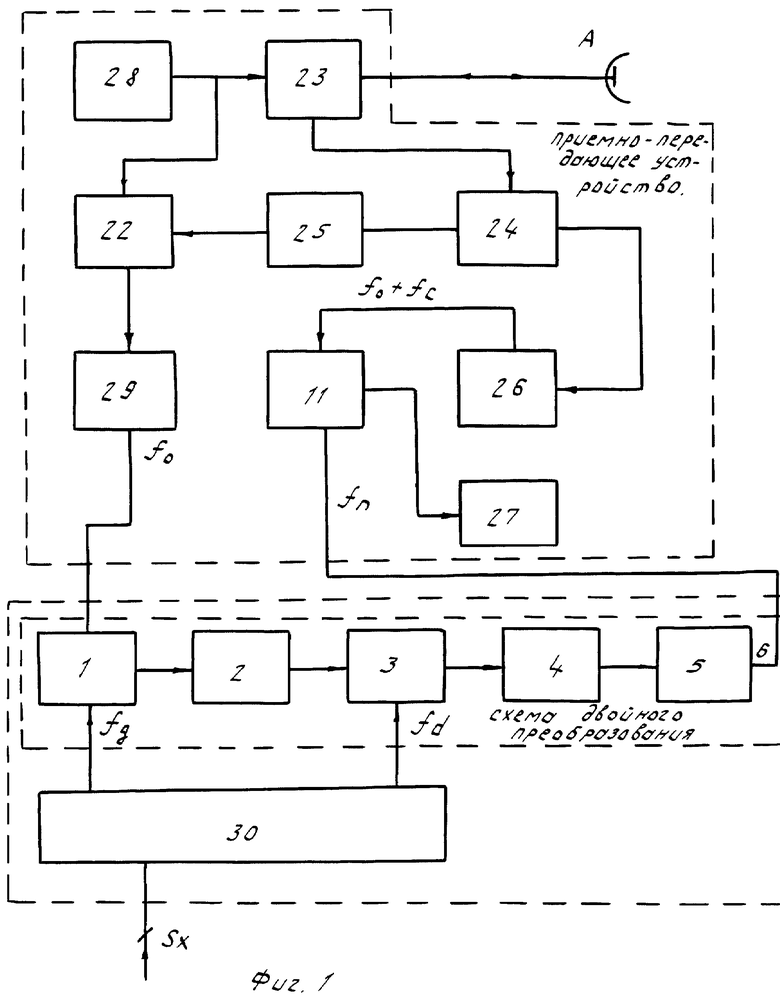
На фиг.1 изображена структурная схема прототипа.
На фиг.2 изображена структурная схема предлагаемого устройства в составе импульсно-допплеровской РЛС. На фиг.3 изображена структурная схема устройства формирования управляющего напряжения. На фиг.4 изображены частотные характеристики симметрично-расстроенных допплеровских фильтров. На фиг.5 изображена структурная схема формирования двух квадратур цифровых допплеровских фильтров первого порядка с симметрично-расстроенными частотными характеристиками.
На чертежах и в тексте приняты следующие обозначения:
1 - первый смеситель схемы двойного преобразования частоты фазового детектора РЛС;
2 - первый фильтр;
3 - второй смеситель схемы двойного преобразования частоты;
4 - второй фильтр;
5 - усилитель;
6 - схема двойного преобразования частоты;
7 - управляемый гетеродин;
8 - опорный гетеродин;
9 - схема формирования управляющего напряжения;
10 - опорный гетеродин РЛС;
11 - фазовый детектор РЛС;
12 - аналого-цифровой преобразователь РЛС;
13 - допплеровский фильтр Ф1;
14 - допплеровский фильтр Ф2;
15 - детектор фильтра Ф1;
16 - детектор фильтра Ф2;
17 - интегратор фильтра Ф1 ;
18 - интегратор фильтра Ф2;
19 - устройство вычисления разности интегралов и максимально значения;
20 - устройство деления разности интегралов на максимальное значение;
21 - преобразователь код-аналог;
22 - смеситель передающего устройства РЛС;
23 - антенный коммутатор;
24 - смеситель приемника РЛС;
25 - высокочастотный гетеродин;
26 - усилитель промежуточной частоты;
27 - устройство обработки;
28 - передатчик;
29 - когерентный гетеродин;
30 - сигнальный процессор;
31 - хронизатор РЛС.
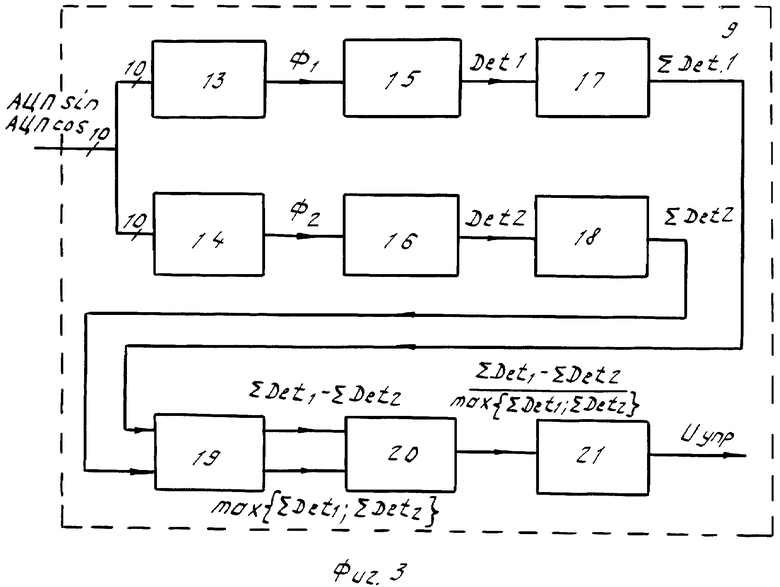
Предлагаемое устройство (см.фиг.2) состоит из последовательно соединенных первого смесителя 1, первого фильтра 2, второго смесителя 3, второго фильтра 4, усилителя 5, которые образуют схему двойного преобразования частоты 6, первого (управляемого) гетеродина 7, второго гетеродина 8, устройства формирования управляющего напряжения 9, при этом один из входов смесителя 1 служит для подключения выходного сигнала опорного гетеродина 10 РЛС, а выход усилителя 5 служит для подключения к одному из входов фазового детектора 11 РЛС и является выходом всего устройства; выход гетеродина 7 подключен ко второму входу смесителя 1, а выход гетеродина 8 - ко второму входу смесителя 3, при этом к управляющему входу гетеродина 7 подключается выходной сигнал устройства формирования управляющего напряжения 9, входными сигналами которого являются сигналы с выхода аналого-цифрового преобразователя 12. При этом формирователь управляющего напряжения (см.фиг.3) содержит два параллельных канала, каждый из которых состоит из последовательно соединенных допплеровского фильтра 13 (14), детектора 15 (16), интегратора 17 (18), причем выходы интеграторов соединены раздельно со входами устройства 10, вычисляющего разность интегральных значений и максимальное из них, выходы устройства 19 соединены раздельно со входами делителя 20 полученной разности на максимальное значение, а выход делителя 20 соединен со входом преобразователя код-аналог 21, выход которого является выходом устройства формирования управляющего напряжения и подключен к управляющему входу гетеродина 7.
Рассмотрим работу устройства компенсации допплеровской частоты, возникающей в эхосигнале, в составе бортовой импульсно-допплеровской РЛС с внутренней когерентностью (см.фиг.2), в состав которой входит опорный гетеродин 10 промежуточной частоты, выход которого подключен к смесителю 22 передатчика, соединенному с антенным коммутатором 23 и далее с антенной системой А. Антенный коммутатор 23 соединен также со смесителем приемника 24, на второй вход которого подается сигнал гетеродина 25. Зондирующие сигналы, сформированные из сигнала опорного гетеродина 10, поступают на антенную систему через смеситель 22 и коммутатор 23, вследствие чего имеют начальную фазу, связанную с фазой опорного гетеродина 10, фаза высокочастотного гетеродина 25 исключается при преобразовании эхосигналов, принятых антенной системой, в смесителе 24. Таким образом, фаза эхосигналов будет связана с фазой опорного гетеродина 10 и содержать фазовый сдвиг, пропорциональный допплеровской частоте, возникающей при движении носителя и вращении антенной системы (А). Если опорным сигналом фазового детектора является сигнал гетеродина 10, то выходные видеосигналы фазового детектора будут иметь центральную частоту, равную допплеровской частоте, связанной с движением.
При преобразовании на видеочастоту в фазовом детекторе 11 эта частота может быть исключена путем изменения на соответствующую величину частоты опорного напряжения фазового детектора 11.
Для этого между выходом опорного гетеродина 10 и входом фазового детектора 11 включается схема двойного преобразования частоты, состоящая из последовательно соединенных первого смесителя 1, первого фильтра 2, второго смесителя 3, второго фильтра 4 и усилителя 5, причем на вторые входы смесителей 1 и 3 подаются выходные сигналы гетеродинов 7 и 8 соответственно. В результате преобразования в сигнале опорного гетеродина возникает частотный сдвиг, соответствующий разности частот гетеродинов 7 и 8.
В прототипе (см.фиг.1) представлена схема РЛС с внешней когерентностью, которая отличается тем, что фаза зондирующего сигнала задается передатчиком 28, который фазирует в каждом такте зондирования когерентный гетеродин 29 сигналом, преобразованным в смесителе 22 к промежуточной частоте с помощью гетеродина 25. При преобразовании в смесителе 24 фаза гетеродина 25 исключается; эхо-сигналы на промежуточной частоте с выхода усилителя 26 поступают на фазовый детектор 11 и содержат допплеровскую поправку, связанную с движением носителя и вращением антенной системы (А).
Устройство двойного преобразования частоты 6 включается между выходом когерентного гетеродина 29 и входом фазового детектора 11. На вторые входы смесителей 1 и 3 подаются сигналы с выходов сигнального процессора 30, сформированные таким образом, чтобы в результате преобразования в сигнале когерентного гетеродина возникал сдвиг, соответствующий допплеровскому смещению в эхосигнале. По существу, работа обоих схем компенсации полностью аналогична и может быть использована в РЛС с внешней и внутренней когерентностью.
Компенсация допплеровской частоты, возникающей в эхосигнале, происходит следующим образом. Управление частотой управляемого гетеродина 7 производится в определенные дискретные моменты времени. В начальный момент частота опорного напряжения фазового детектора 11 на выходе схемы 6 двойного преобразования частоты будет равна
где fо - частота опорного гетеродина 10 РЛС;
fг1 - частота управляемого гетеродина 7 в начальный момент времени;
fd - частота опорного гетеродина 8.
Частота эхосигнала на входе фазового детектора 11 будет равна

где fc1 - допплеровская частота эхосигнала, возникающая при движении носителя.
Допплеровская частота видеосигналов на выходе фазового детектора будет равна
Сигнал частоты fАЦП, переведенный в схеме АЦП 27 в цифровой код, поступает на схему формирования управляющего напряжения 9 (см. фиг.3), где формируется управляющее напряжение Uупр, изменяющее частоту управляемого гетеродина 7 на величину fАЦП. В следующий момент регулирования частота управляемого гетеродина 7 становится равной

Опорная частота фазового детектора 11 становится равной

К этому моменту времени на сигнальном входе фазового детектора 11 имеется эхосигнал с другой допплеровской частотой fс2.
Изменение допплеровской частоты зависит от собственной скорости носителя, параметров вращения антенной системы и величины временного интервала между моментами регулирования. Допплеровская частота видеосигнала на выходе фазового детектора будет
Управляющий сигнал Uупр, сформированный в схеме формирования управляющего напряжения 9 (см. фиг.3), изменит частоту управляемого гетеродина 7 на величину, равную разности fc2-fc1 между текущим и предыдущим значением допплеровской частоты. Эта разность и будет определять величину погрешности, с которой будет компенсироваться допплеровская частота эхосигнала, возникающая в результате движения носителя. Величина этой погрешности определяется интервалом между моментами регулирования и погрешностью производимых вычислений в схеме формирования управляющего напряжения 9.
Устройство формирования управляющего напряжения, в общем случае, должно представлять собой устройство, преобразующее входную информацию о допплеровской частоте, содержащуюся в эхосигналах, таким образом, чтобы выделить сигнал, зависящий от допплеровской частоты, предназначенный для управления частотой гетеродина 7. В настоящем изобретении предлагается следующий способ преобразования эхосигнала: с помощью фильтрации в двух симметрично сдвинутых относительно нуля допплеровских фильтрах выделяются сигналы, зависящие от величины и знака допплеровской частоты; затем эти сигналы детектируются для получения значений мощности эхосигналов на выходах фильтров и интегрируется, т.е. значения мощности усредняются по определенному интервалу дальности; разность этих мощностей затем нормируется и преобразуется в аналоговый управляющий сигнал для управления частотой гетеродина. Конкретная схема реализации устройства формирования управляющего напряжения приведена на фиг.3.
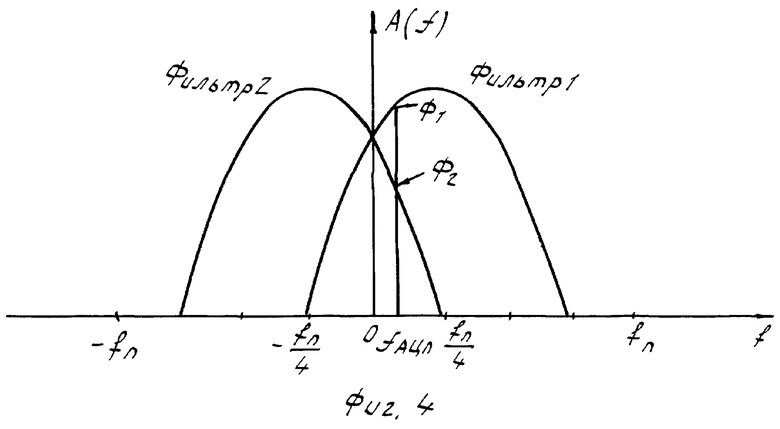
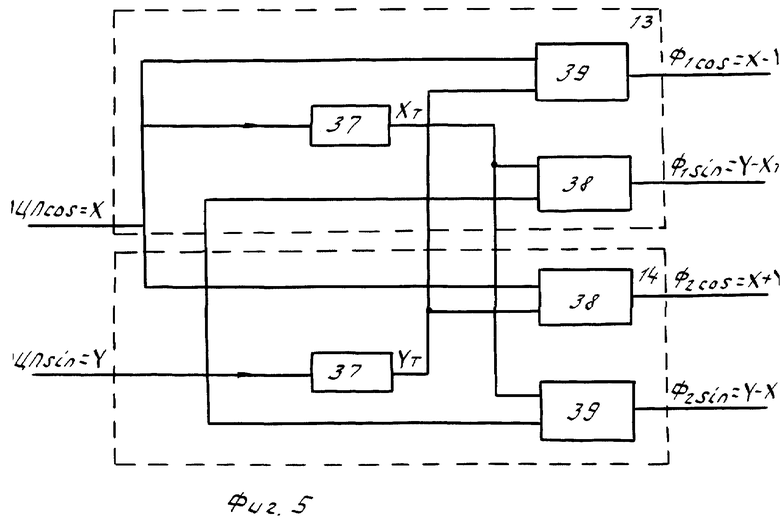
Устройство содержит два параллельных канала, каждый из которых состоит из цифрового допплеровского фильтра (13) 14, детектора 15 (16) и интегратора 17 (18). Частотные характеристики допплеровских фильтров 13 и 14 смещены относительно нуля допплеровских частот в противоположные стороны на четверть частоты повторения (см. фиг.4); схема формирования квадратурных составляющих этих фильтров приведена на фиг.5. В каждом фильтре содержится линия задержки 37, выполненная на цифровых ОЗУ, на величину периода повторения, и устройство суммирования 38 и вычитания 39, ко входам которых подключаются задержанные Хт; Yт и незадержанные Х и У квадратурные составляющие входных эхосигналов.
Выходные сигналы допплеровских фильтров 13 (14) подключаются ко входам детекторов 15 и 16.
Выходные сигналы детекторов 15 (16) подключаются ко входам схем 17, 18, представляющих собой цифровые интеграторы (сумматоры).
Выходы интеграторов 17 (18) соединяются со входами схемы 19, предназначенной для сравнения интегральных значений и вычисления разности и максимального из них. Выходы устройства 19 подключаются по входам устройства нормирования 20 - деления разности интегральных значений на максимальное из них, выход устройства 20 подключается ко входу преобразователя код-аналог 21, аналоговое напряжение на выходе которого, пропорциональное частному от деления разности интегральных значений на максимальное из них, является напряжением регулировки частоты управляемого кварцевого гетеродина 7.
Схема работает следующим образом.
Цифровые эхосигналы в каждом элементе разрешения РЛС с выходов устройства аналого-цифрового преобразования 12 поступают на допплеровские фильтры 13 и 14. Если допплеровская частота эхосигналов fАЦП не равна нулю, что имеет место при движении носителя РЛС, то сигналы Ф1 и Ф2 на выходах фильтров будут иметь различные значения (см. фиг.4), причем эти значения будут зависеть от величины и знака допплеровской частоты fАЦП. Далее эти сигналы должны быть продетектированы для получения значений мощности отражений и сравнения этих значений в этих двух фильтрах.
Детектирование производится в детекторах 15 и 16. Полученные продетектированные значения Det1 и Det2 интегрируются, т.е. значение мощности эхосигналов в каждом фильтре усредняется в определенном интервале по дальности. Выбор этого интервала определяется известным образом и зависит от изменения значений допплеровской частоты, связанного с эффектом наклонной дальности (см. [1]) и, во-вторых, от количества элементов дальности, которые могут быть обработаны за один период зондирования в схеме обработки-устройстве формирования управляющего напряжения 9; эти параметры зависят от типа РЛС. В заявленном устройстве количество усредняемых (обрабатываемых) элементов равно 32.
Выходы интеграторов 17 (18) соединяются со входами схемы сравнения 19, где мощности сигналов в каждом фильтре 13 (14) сравниваются, вычисляется разность мощностей в первом и втором фильтрах, равная  и определяется максимальное из этих значений
и определяется максимальное из этих значений 
Величина и знак этой разности зависят от соотношения мощностей сигналов на выходах симметрично расстроенных фильтров 13 (14) и однозначно определяются величиной допплеровской частоты fАЦП.
Выходы схемы сравнения 19 соединены со входами схемы нормировки 20, где производится деление разности  на
на  При нормировании исключается зависимость управляющего кода от абсолютной величины эхосигналов.
При нормировании исключается зависимость управляющего кода от абсолютной величины эхосигналов.
Таким образом, на выходе устройства нормировки 20 формируется цифровой управляющий код, пропорциональный допплеровской частоте эхосигналов.
В рассматриваемом изобретении число разрядов в аналого-цифровом преобразователе 12 равно десяти. С учетом интегрирования в 17 и 18 и нормировки в устройстве 20 цифровой управляющий код на выходе устройства 20 имеет 11 разрядов: 10 значений и один знаковый. Таким образом, при характеристиках РЛС, близких к прототипу, погрешность компенсации составляет величину в 4 раза (на 2 разряда) меньшую, чем в схеме, предложенной в прототипе (т.е. около 2-4 Гц).
Экспериментальная проверка лабораторного образца заявленного устройства показала результаты, подтверждающие эту оценку. Протокол испытаний прилагается. В преобразователе код-аналог 21 этот код преобразуется в аналоговое напряжение, предназначенное для регулировки частоты кварцевого гетеродина 7.
Формирователь управляющего кода 9 реализован в виде универсального вычислительного процессора, выполненного на микросхемах средней и высокой степени интеграции серий 1802, 530, 533, 541. В качестве линий задержки, а также для хранения промежуточных результатов вычисления используются ОЗУ на микросхемах 541РУ2 емкостью 32 кбит; формирование квадратурных составляющих допплеровских фильтров 13 (14), операции суммирования 38, вычитания 39, сравнения (в 19) осуществляются с помощью 12-разрядного перемножителя 1802 ВР4 и шестнадцатиразрядного арифметикологического устройства ALU (533ИПЗ). Операция нормирования (деления) (20) осуществляется с помощью ППЗУ 556РТ7, адресными входами которого является самое число, а выходные значения представляют собой величину, обратную ему. Управление работой процессора микропрограммное, программа обработки (устройство 9), составленная в соответствии с требуемым алгоритмом, записывается в ППЗУ 556РТ7. Наличие 40 микрокоманд позволяет использовать устройство в качестве универсального спецпроцессора для формирования различных допплеровских фильтров, а также решения других задач обработки. Для синхронизации (см. [3]) работы всех составных частей устройства формирования управляющего напряжения 9 используются непрерывные временные шкалы и отдельные импульсные сигналы, сформированные в хронизаторе 31 РЛС путем деления частоты опорного гетеродина 10 РЛС. Основная временная шкала имеет период следования импульсов, равный длительности элемента разрешения РЛС; наиболее высокочастотная шкала 10 МГц является опорной при формировании импульсных сигналов управления. Программа обработки составляется в виде импульсных сигналов управления в соответствии с требуемым алгоритмом, последовательностью выполнения действий и быстродействием входящих устройств.
Таким образом, использование изобретения позволяет уменьшить погрешность компенсации за счет использования информации, содержащейся в эхосигналах, отраженных от подстилающей поверхности, и формирования управляющего кода, содержащего более точную информацию о скорости носителя РЛС.
Источники информации
1. Справочник по радиолокации. Под ред. М.Сколника; пер.с англ., т. 1,3. - М. Сов.радио, 1976.
2. Грен А. Устройство для компенсации мешающих отражений, вызванных движением РЛС. Авт.св. №438455 от 04.02.1986, G 01 S 13/58, 1962.
3. Гарп Н.Г. Синхронизация в телевидении. - М.: Радио и связь, 1982, с.53-66.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ДОПЛЕРОВСКОЙ ЧАСТОТЫ | 1990 |
|
RU2231085C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СКОРОСТИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1978 |
|
SU1840876A1 |
| ПРИЕМНОЕ УСТРОЙСТВО СО СТАБИЛИЗАЦИЕЙ УРОВНЯ ЛОЖНЫХ ТРЕВОГ | 1990 |
|
RU2226703C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ДЛЯ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1989 |
|
RU2035051C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1980 |
|
SU1840929A1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ МИГРАЦИИ ЦЕЛЕЙ ПО ДАЛЬНОСТИ | 2017 |
|
RU2673679C1 |
Изобретение относится к радиолокации и может быть использовано в бортовых импульсно-допплеровских радиолокационных системах (РЛС). Технический результат заключается в уменьшении погрешности компенсации допплеровской частоты за счет выделения допплеровской частоты, вызванной движением носителя, из эхосигнала, отраженного от подстилающей поверхности. Устройство компенсации допплеровской частоты, возникающей в эхосигнале вследствие движения носителя импульсно-допплеровской РЛС, содержит первый смеситель, один из входов которого является сигнальным входом всего устройства, служащим для подключения к выходу второго опорного гетеродина РЛС. Выход смесителя соединен с последовательно включенными первым фильтром, соединенным с одним из входов второго смесителя, вторым фильтром и усилителем, выход которого является выходом всего устройства и является одним из входов фазового детектора РЛС. Согласно изобретению введены устройство формирования управляющего напряжения, первый гетеродин и второй гетеродин. Выход первого гетеродина соединен со вторым входом первого смесителя. Выход второго гетеродина - со вторым входом второго смесителя. Выход устройства формирования управляющего напряжения соединен с управляющим входом первого гетеродина. Вход устройства формирования управляющего напряжения является входом всего устройства и служит для подключения выходного десятиразрядного сигнала цифроаналогового преобразователя. Устройство формирования управляющего напряжения содержит два параллельных канала, каждый из которых состоит из последовательно соединенных допплеровского фильтра, детектора и интегратора. Причем частотные характеристики допплеровских фильтров смещены относительно нуля допплеровских частот симметрично но одну четверть частоты повторения. Общий вход допплеровских фильтров является входом устройства формирования управляющего напряжения. Причем выходы каналов соединены раздельно с устройством вычисления максимального значения энергии сигналов на выходах допплеровских каналов и их разности. Выходы устройства соединены раздельно с соответствующими входами делителя разности указанных значений на максимальное из них, выход которого соединен со входом преобразователя код-аналог, выход которого является выходом устройства формирования управляющего напряжения. 5 ил.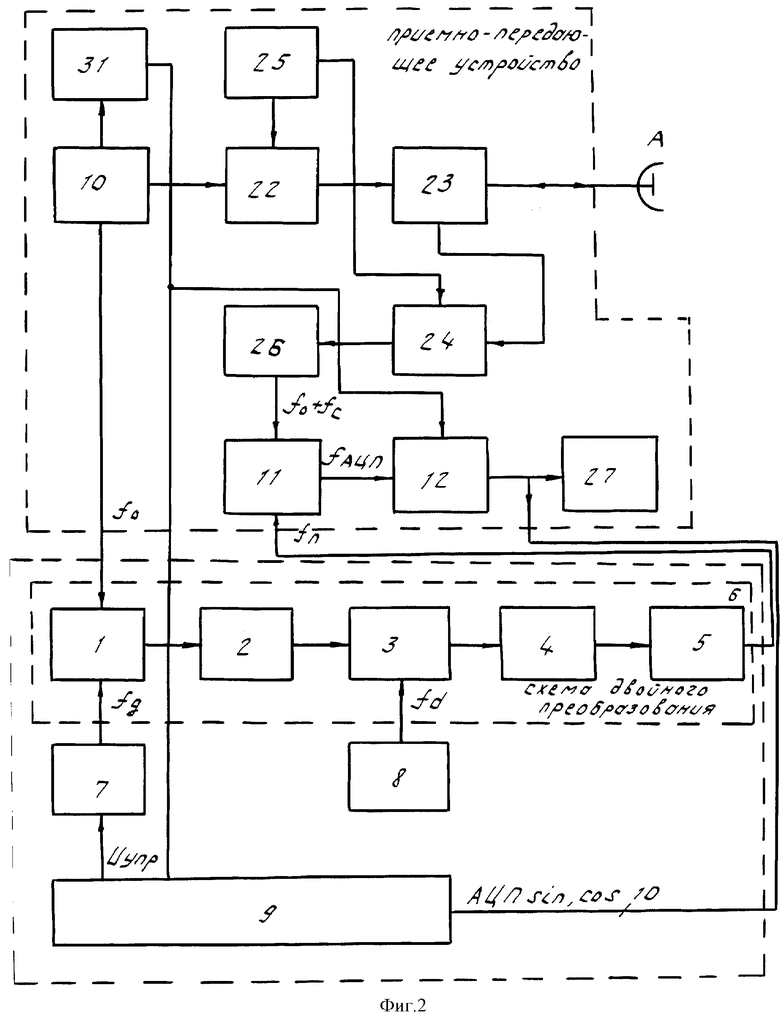
Устройство для компенсации допплеровской частоты, содержащее первый смеситель, один из входов которого подключен к выходу опорного гетеродина РЛС и является сигнальным входом устройства, выход смесителя соединен с последовательно подключенными первым фильтром, соединенным с одним из входов второго смесителя, вторым фильтром и усилителем, выход которого является выходом устройства и одним из входов фазового детектора РЛС, отличающееся тем, что, с целью уменьшения погрешности компенсации допплеровской частоты, возникающей в эхосигнале вследствие движения носителя импульсно-допплеровской РЛС, в него введены устройство формирования управляющего напряжения, первый гетеродин и второй гетеродин, причем выход первого гетеродина соединен со вторым входом первого смесителя, выход второго гетеродина - со вторым входом второго смесителя, выход устройства формирования управляющего напряжения является входом всего устройства и соединен с управляющим входом первого гетеродина, а вход устройства формирования управляющего напряжения подключен к выходу цифроаналогового преобразователя РЛС, при этом устройство формирования управляющего напряжения выполнено в виде двух параллельных каналов, каждый из которых содержит последовательно соединенные допплеровский фильтр, детектор и интегратор, общий вход допплеровских фильтров является входом устройства формирования управляющего напряжения, причем выходы каналов подключены к соответствующему входу устройства вычисления максимального значения сигналов и их разности, а выходы устройства соединены с соответствующими входами делителя разности интегралов на максимальное значение, выход которого соединен со входом преобразователя "код-аналог", выход которого является выходом устройства формирования управляющего напряжения.
| Гарп Н.Г | |||
| Синхронизация в телевидении | |||
| - М.: Радио и связь, 1982, с.53-66 | |||
| Патент США №4568939, МКИG 01 S 13/58, опубл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

