(54) П.ПОДОУБОРОЧНАЯ МАШИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Плодоуборочная машина | 1981 |
|
SU982575A1 |
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ПЛОДОВ С ДЕРЕВЬЕВ К ПЛОДОУБОРОЧНОМУ АГРЕГАТУ | 1973 |
|
SU376057A1 |
| Машина для уборки плодов | 1975 |
|
SU581905A1 |
| ПЛОДОУБОРОЧНАЯ МАШИНА | 1969 |
|
SU234783A1 |
| Улавливатель плодоуборочной машины | 1982 |
|
SU1055399A1 |
| ПЛОДОУБОРОЧНАЯ МАШИНА | 1998 |
|
RU2161397C2 |
| Плодоуборочная машина | 1976 |
|
SU627779A1 |
| Улавливатель плодоуборочной машины | 1988 |
|
SU1658884A1 |
| Улавливающее устройство плодоуборочной машины | 1975 |
|
SU536783A1 |
| Плодоуборочная машина | 1987 |
|
SU1468462A1 |
1
Изобретение относится к сельскохозяйственному машиностроению и предназначено для механизированной уборки плодовых культур.
Известна плодоуборочная машина, состояш,ая из специального самоходного шасси, на котором установлены гидравлический привод рабочих органов, рабочее место оператора, инерционный дисбалансный встряхиватель, собираюшие транспортеры, два неподвижных улавливаюших щита с эластичной улавливающей поверхностью (1.
Известна также машина для уборки плодов, содержащая раму с закрепленным на ней выдвижным транспортером с кареткой и гидроцилиндром, вибратором, смонтированные на раме основной и дополнительный улавливатели, устройство для очистки и емкость для плодов 2.
Однако в известной машине дополнительный улавливатель переносится от дерева к дереву двумя вспомогательными рабочими, что влияет на производительность мащины, так как перенос и установка приводит к большой потере технологического времени.
Целью изобретения является повышение производительности.
Указанная цель достигается тем, что дополнительный улавливатель выполнен секционным, а секции его закреплены консольно на раме с зазором относительно друг друга и выполнены в виде шарнирных параллелограммных механизмов с установленным над ним эластичным экраном, один конец которого закреплен на свободном конце дополнительных улавливателей, а второй
10 соединен с рамой пйсредством подпружиненного барабана, причем машина снабжена эластичными клапанами, которые закреплены на поворотных в горизонтальной плоскости рычагах. А также тем, что поверхнос15 ти верхних звеньев шарнирных параллелограммных механизмов имеют эластичное покрытие, а каретка связана с гидроцилиндром ее перемещения посредством цепи.
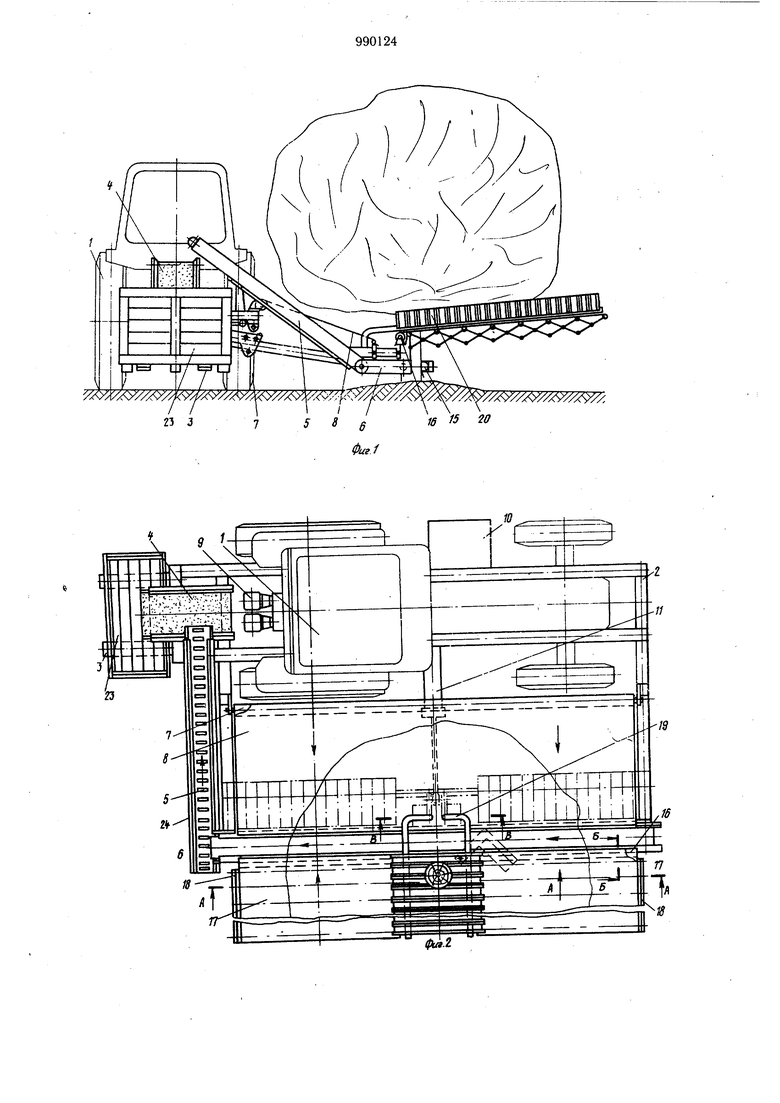
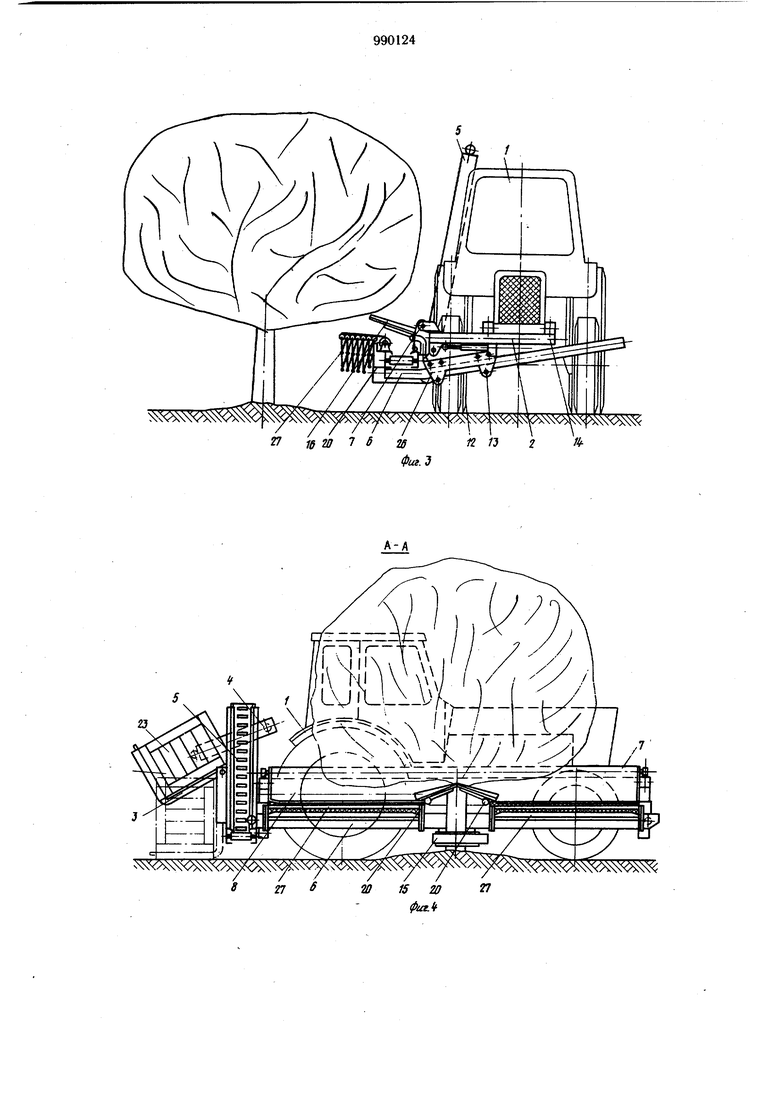
На фиг. 1 изображена плодоуборочная
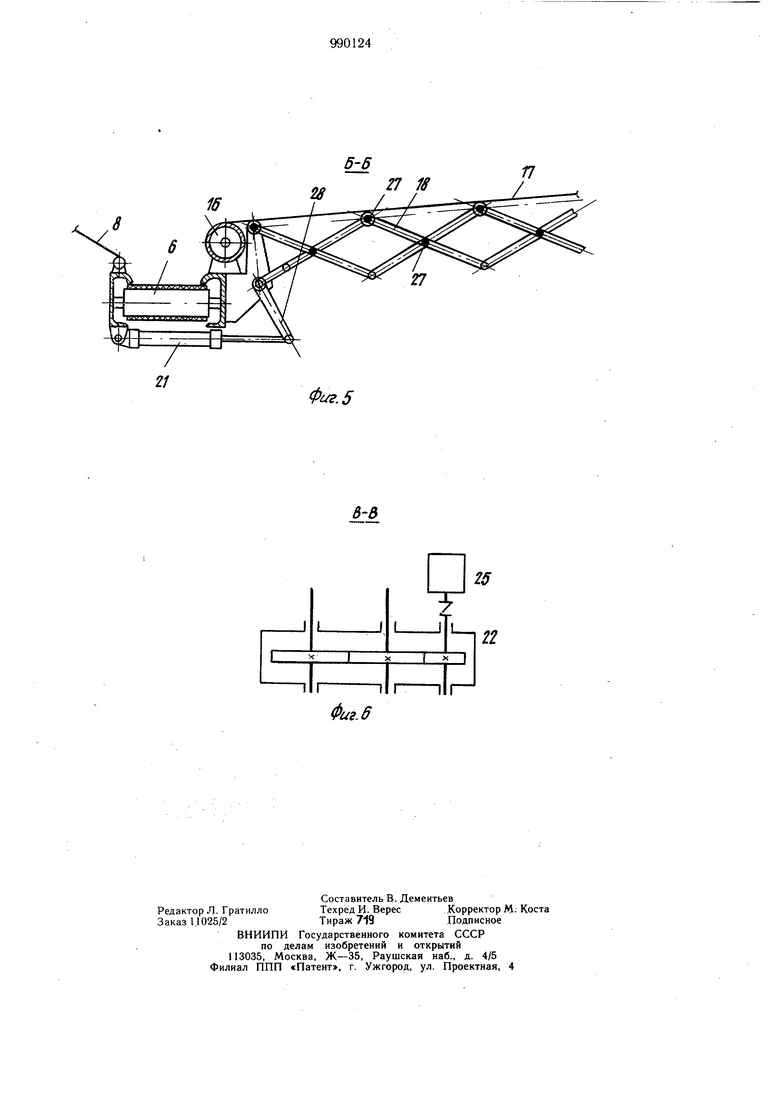
20 машина, вид сзади; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же вид спереди; .на фиг. 4 - разрез А-А на фиг. 2; на фиг. 5 - разрез Б-Б на фиг. 2; на фиг. 6 - сечение В-В на фиг. 2.
Плодоуборочная машина навешивается на тракторе 1 и состоит из рамы машины 2, на которую навешены вилочный подъемник .3, сортировочная горка 4, ленточноцепной скребковый шарнирноломающийся транспортер 5, продольный собирающий ленточный транспортер 6, барабан 7, улавливаюшее полотно 8, насосная станция 9, бак 10 для масла, гидроцилиндр 11 выдвижения, гидроцилиндры 12 подъема, каретки 13 подъема, балки 14, дисбалансный штамбовый встряхиватель 15, короткие барабаны 16, улавливающие полотна 17, многозвенные пространственные фермы 18, рычаги 19 уплотнителей, эластичные клапаны 20, гидроцилиндры 21 и редуктор 22.
Рама машины 2 предназначена для установки на ней всех рабочих органов машины и крепится болтами к лонжеронам и заднему мосту колесного трактора.
Вилочный подъемник 3 предназначен для подъема с земли, удержания и изменения угла наклона при загрузке площади контейнера-поддона 23.
Сортировочная горка 4 представляет собой ленточный транспортер, лента которого имеет шероховатую рабочую поверхность, наклоненный в сторону загружаемого контейнера- поддона 23. Движение ленты противоположное скатывающимся плодам Сортировочная горка 4 предназначена для отделения от плодов листьев и мелких веточек.
Ленточио-цепной скребковый шарнирноломающийся транспортер 5 (фиг. 1) имеет горизонтальную раму, прикрепленную к раме продольного собирающего ленточного транспортера 6, и наклонную раму, соединенные между собой шарниром 24.
Рабочий орган транспортера 5 представляет собой ленту, к которой прикреплены эластичные скребки. Сама же лента с двух сторон прикреплена к бесконечно замкнутым цепным контурам. ШарнирноломающийСя транспортер 5 предназначен для транспортирования плодов с листьями и мелкими веточками от ленточного транспортера 6 к сортировочной горке 4 (фиг. 2).
Продольный собирающий ленточный транспортер 6 предназначен для сбора с улавливающих полотен 8 и 17 и транспортировки к транспортеру 5 листьев, мелких веточек, плодов. К раме ленточного транспортера 6 крепятся дисбалансный инерционный штамбовый встряхиватель 15, где многозвенные пространственные фермы 18, два коротких барабана 16 с пружиной кручения, редуктор 22 с гидромотором 25 привода рычагов 19 с клапанами 20 уплотнителей и два гидроцилиндра 21 раздвижения многозвенных ферм 18.
Барабан 7 с пружиной кручения крепится к раме машины 2 и предназначен для намотки улавливающего полотна 8 при переводе машины из рабочего положения в транспортное.
Каретка 13, прикрепленная шарнирно одни.м концом к раме машины 2, второй конец которой через втулочно-роликовую цепь 26 соединен со штоком гидроцилиндра 12 подъема, также прикрепленного к раме машины 2, предназначена для удержания подвижного бруса 14, один конец которого жестко соединен с продольным собирающим ленточным транспортером 6. Ка-ретка 13, гидроцилиндр 12 и цепь 26 также предназначены для изменения высоты подъема над землей транспортера 6 и изменения узла наклона улавливающих полотен 17.
Гидроцилиндр 11, закрепленный одним концом к раме машины 2, а другим - к раме продольного транспортера 6, предназначен для выдвижения продольного транспортера 6 под крону дерева до упора подушки дисбалансного инерционного встряхивателя 15 в штамб.
Многозвенная пространственная ферма 18 состоит из двух многозвенников, соединенных между собой в верхних и средних шарнирах стержнями 27, причем стержни верхних шарниров армированы эластичным материалом (фиг. 4).
Многозвенная пространственная ферма 18 консольно крепится к раме продольного собирающего транспортера 6. К последнему верхнему стержню 27 фермы 18 крепится улавливающее полотно 17, второй конец которого намотан на короткий барабан 16 с пружиной кручения. Раздвижка фермы 18 0 выполняется с помощью гидроцилиндра 21 и рычага 28.
Уплотнители защтамбового пространства, состоящие из рычагов 19, к которому прикреплены эластичные клапаны 20, предназначены для перекрытий свободной по5 верхности между двумя многозвенными пространственными фермами 18.
Редуктор 22 предназначен для синхронного поворота рычагов 19 уплотнителей.
Плодоуборочная машина работает следующим образом.
Мащина съезжает в междурядье в транспортном положении и останавливается напротив дерева таким образом, чтобы щтамб дерева находился против зоны захвата
5 дисбалансного инерционного встряхивателя 15. С помощью гидроцилиндра 11 оператор выдвигает ленточный транспортер 6 с установленным на нем встряхивателем 15, многозвенными пространственными фермами 18 и уплотнителями до упора встряхи0 вателя в штамб дерева, при этом полотно 8 улавливателя разматывается. При выдвижении транспортера 6 его установка по высоте от земли выполняется с помощью гидроцилиндра 12, шток Которого через втулочно-роликовую цепь связан с кареткой 13. После ЭТОГО оператор включает привод закрытия рычага дисбалансного инерционного встряхивателя 15, при этом происходит захват штамба дерева. Далее оператор с помощью гидроцилиндров 21 производит раздвижку многозвенных пространственных ферм 18, при этом происходит разматывание улавливающих полотен 17 с коротких барабанов 16. После этого оператор включает гидромотор 25 редуктора 22, и рычаги 19 с клапанами 20 синхронно поворачиваются -из транспортного положения в рабочее до полного смыкания эластичных клапанов 20 между собой. При этом происходит перекрытия заштамбового пространства и уплотнение самого щтамба. Машина готова к встряхиванию.Оператор включает гидромоторы дисбалансного инерционного встряхивателя, происходит встряхивание дерева. Оторвавшиеся плоды, листья и мелкие веточки падают на улавливающие полотна 8 и 17 и по ним скатываются на ленту собирающего транспортера 6, который транспортирует их на транспортер .5, а он в свою очередь передает их на сортировочную горку 4, где и происходит отделение плодов от листьев и мелких веточек с последующим затариванием плодов в контейнер-поддон или ящик. Для удаления с улавливающих полотен 17 оставшихся плодов, листьев и мелких веточек оператор включает гидроцилиндры 21, при втягивании штока которых происходит сдвижка многозвенных пространственных ферм 18 и намотка улавливающих полотен 17 на короткие барабаны 16. После этого оператор включает гидромотор 25 редуктора 22 привода рычагов 19 и возвращает уплотнители в транспортное положение, одновременно гидроцилиндр И подтягивает собирающий транспортер 6 к трактору. Ввиду того, что брусья 14 при подтягивании транспортера 6 перемещаются в каретках 13, происходит подъем транспортера 6 над землей и поворот ломающегося ленточно-цепного транспортера 5 в транспортное положение. Предлагаемая плодоуборочная машина позволит повысить производительность. Формула изобретения 1. Плодоуборочная мащина, содержащая раму с закрепленными на ней выдвижным транспортером с кареткой и гидроцилиндром, вибратором, смонтированные на раме основной и дополнительный улавливатели, устройство для очистки и емкость для плодов, отличающаяся тем, что, с целью повышения производительности, дополнительный улавливатель выполнен секционным, а секции его закреплены консольно на раме с зазором относительно друг друга и выполнены в виде шарнирных параллелограммных механизмов с установленным над ним эластичным экраном, один конец которого закреплен на свободном конце дополнительных улавливателей, а второй соединен с рамой посредством подпружиненного барабана, причем машина снабжена эластичными клапанами, которые закреплены на поворотных в горизонтальной плоскости рычагах. 2.Машина по п. 1, отличаюш,аяся тем, что поверхности верхних звеньев шарнирных параллелограммных механизмов имеют эластичное покрытие, 3.Машина по п. 1, отличающаяся тем, что каретка связана с гидроцилиндром ее перемещения посредством цепи. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3477215, кл. 56-328, 1969. 2.Варламов Г. П. Машина для уборки фруктов. «Машиностроение, 1978, с. 145-148.
i М
it4%j-fe -bia
// /
27 20 }5 20
X
,7
-t
/ /
iO-ff Фиг. 5 27 18
Фиг. 6
