1
Устройство относится к черной металлургии и может быть использовано в прокатных цехах машиностроительных заводов в устройствах для направлеиия и каитовки прокатных полос.
Известен аппарат для приема, кантовки и задачи полосы по основному авт. св. № 544488, содержащий приводные ролики, профиль которых образует закрытый кантующий калибр, часть которого образована плоскими участками профиля роликов, что позволяет принимать полосу с произвольно ориентированным в плоскости кантовки иередним концом.
Однако при подаче полосы с неблагоприятно ориентированным передним концом происходит мгновенная остановка иолосы до момента доворота роликов до положения приемки полосы, при этом возникают значительные динамические нагрузки на аппарате.
С целью уменьшения динамических нагрузок при задаче проката с неблагоприятно ориентированным в плоскости кантовки передним коицом предлагаемый аппарат выполнен подвижным вдоль оси транспортирования проката и снабжен механизмом его возврата в исходное по.юженне, например контргрузом.
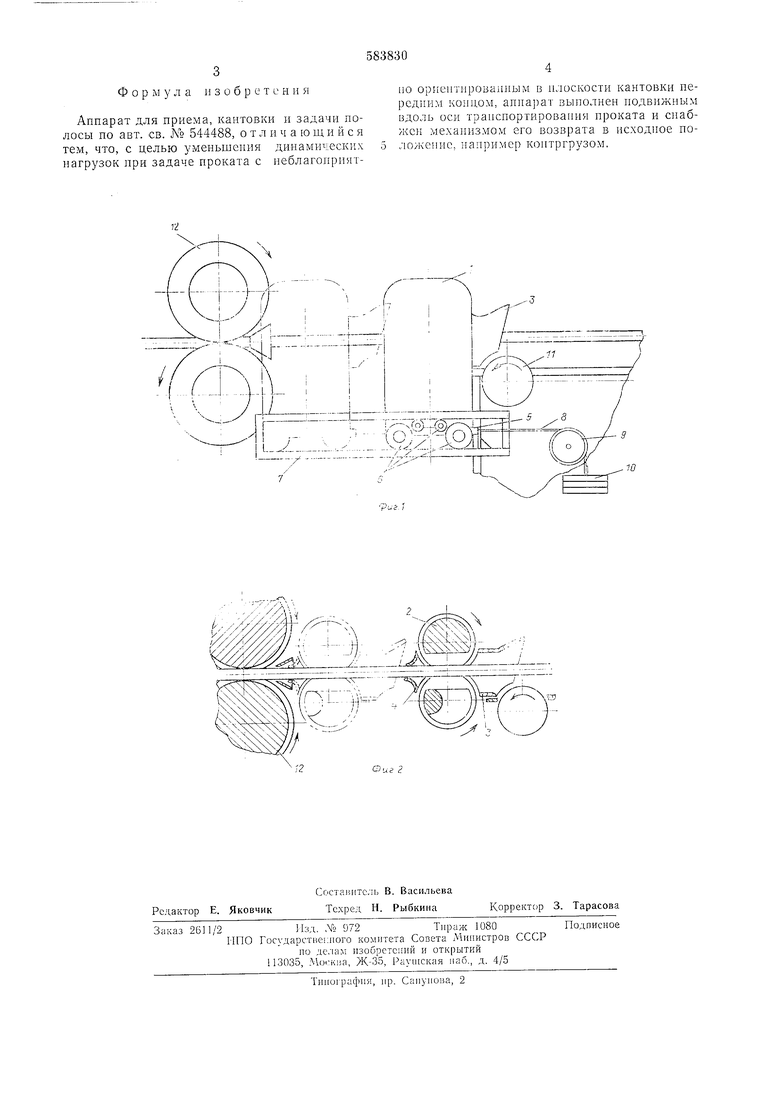
На фиг. 1 изображен предлагаемый аппарат, общий вид; на фиг. 2 - то же, разрез.
Аппарат для приема, кантовки и задачи полосы содержит корпус I, в котором установлены нриводные кантующие ролики 2, профиль которых образует закрытый калибр, часть которого образована плоскими участками профиля. Корпус содержит вводную 3 и выводную 4 проводки. Корпус установлен на подвиЛСиой плите 5, снабл-:енной верхними и нижними колесами 6, устаиовленными в наиравляющих 7.
Для возврапдсния корпуса 1 аппарата в исходное положенне подвижная плита 5 соедипена канатом 8 через блок 9 с контргрузом 10.
При транспортировке полосы рольгангом 11 нередний конец ее через проводку попадает в
калибр кантующих роликов. При благоприятном ориентировании переднего конца полосы и расиоложении плоских }частков профиля роЛНК013 полоса захватывается, кантуется и задается в валки 12 машины, например, праВИЛЬНО. Прн неблагоприятном ориентировании переднего конца полосы и положении проф1:,1я )олнков полоса не захватывается роликами. Пропсход1гг совместное неремешенпе аппарата с полосой (за счет движения массы
полосы) до момента доворота роликов до положения приемки полосы. Прп большой скорости вран1енпя роликов перемещение корпуса иезиачптельио. После освобождения ролиKOi; от полосы, аннарат под действием контргруза возвращается в исходное положение. Форм у л а и 3 о б р е т е н и я Аппарат для приема, кантовки н задачи полосы по авт. св. Л 544488, о т л и ч а ю щ и и с я тем, что, с целью умепьшения динамических нагрузок при задаче проката с неблагоприятпо ориентированным в плоскости кантовки передним концом, анна))ат выполнен нодвижным вдоль осн транспортирования проката и снабжен механизмом его возврата в исходное по;1оженне, например контргрузом.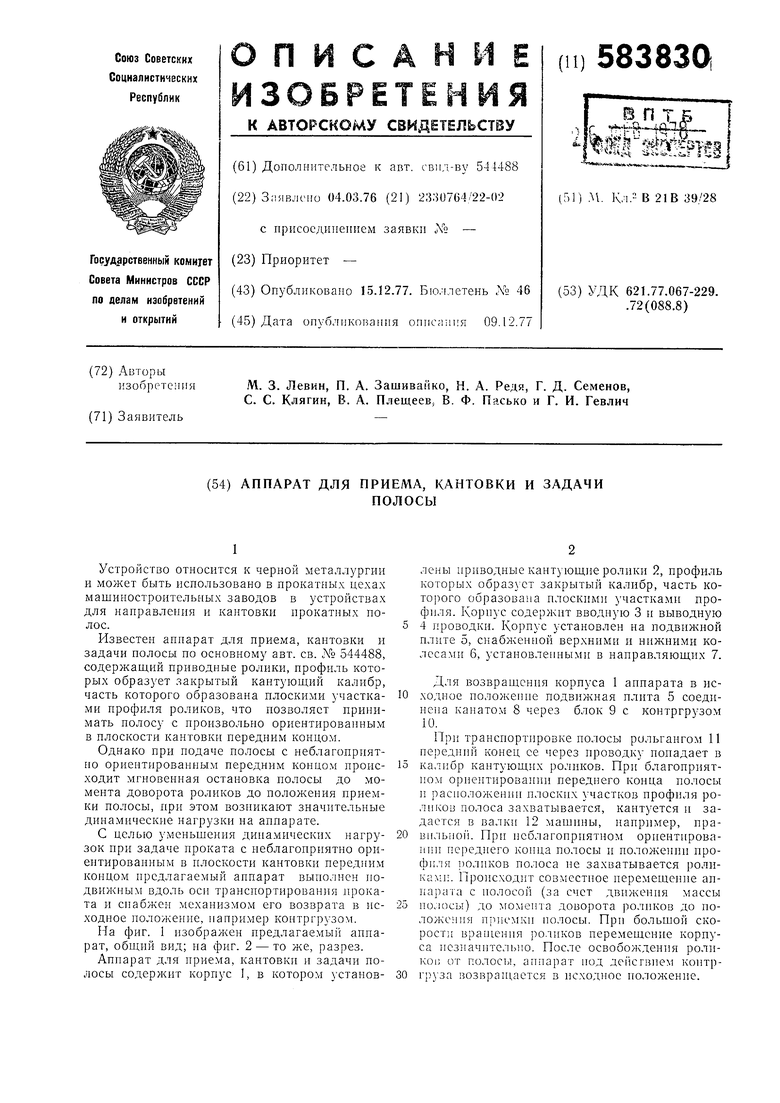
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат для приема,кантовки и задачи полосы | 1972 |
|
SU544488A1 |
| Кантователь сортового проката | 1982 |
|
SU1033250A1 |
| РОЛИКОВАЯ ПРОВОДКА | 2007 |
|
RU2357820C2 |
| Кантующая арматура прокатного стана | 1986 |
|
SU1435352A1 |
| Способ прокатки круглых заготовок | 1987 |
|
SU1438864A1 |
| Кантователь сортового проката | 1990 |
|
SU1754254A1 |
| Кантователь сортового проката | 1990 |
|
SU1733144A1 |
| Способ кантовки трубы при продольной прокатке между проходами | 1991 |
|
SU1780888A1 |
| Аппарат для приема, кантовки и задачи полосы | 1987 |
|
SU1423211A2 |
| Кантователь сортового проката | 1955 |
|
SU869896A1 |
I
