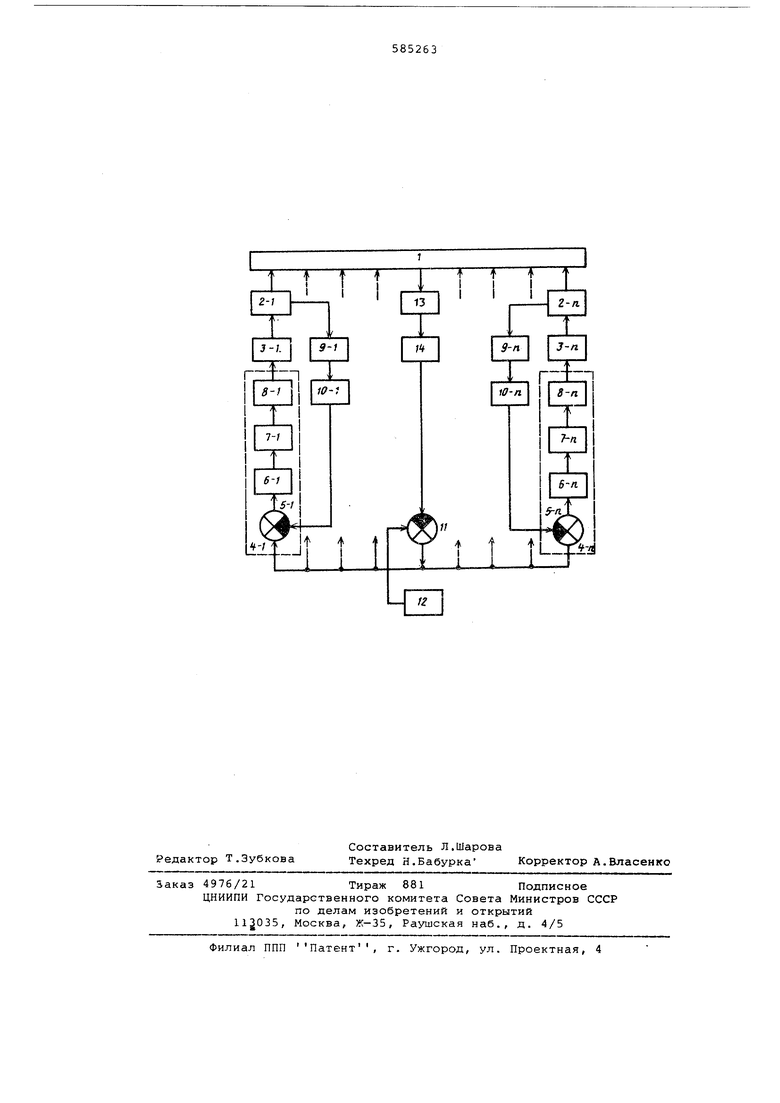
матора 5, усилителя 6, релейного элемента 7 и тиристорного пускателя 8. Около каждого домкрата установлена нивелировочная трубка гидростатического устройства (на черетеже не показана), состоящего из систем гибких шлангов, соединенных между собой и заполненных водой или техническим спиртом. В нивелировочные трубки вставлены емкостные датчики уровня 9, Выход каждого из них через усилитель 10 соединен с сумматором 5 блоков управления электроприводом. Другой вход этих сумматоров связан через сум матор 11 с программным задатчиком под ема 12. В центре опалубки установлен высотомер 13, связанный через общий усилитель 14 с другим входом сумматора 11. Система работает следующим образом Перед началом бетонирования опалубка 1 устанавливается в горизонтальное по ложение, а емкостные датчики уровня 9 - в нулевое положение, при этом сиг нал на выходе усилителей 10 равен нулю. Программным задатчиком 12 задается скорость скольжения опалубки и шаг на каждый подъем. Для подъема опалубки на один шаг программный задатчик 12 увеличивает выходное напряжение на величину, пропорциональную шагу подъема. На выходе сумматора 11 появляется сигнал, который воздействует на блоки управления 4 электроприводом всех домкратов опалубки. Срабатывают релейные элементы 7, которые через тиристорные пускатели 8 включают элек ропроводы 3 домкратов 2. Одновременно включение в работу всех домкратов обеспечивает равномерный подъем опалубки 1. Отключение электроприводов домкратов осуществляется по цепи общей обратной связи, когда перемещение центра опалубки, измеренное высотомером 13, станет равно шагу подъема. В этом случ-ае напряжение на выходе общего усилителя 14 становится равным напряжению программного задатчика 12. В процессе подъема могут наблюдаться отклонения опалубки от горизонтального положения. Тогда на выходе емкостных датчиков 9 появляется сигнал, который по цепи обратной связи через усилители 10 воздействует на сумматоры 5. Знак напряжения на выходе усилителей 10 зависит от положения домк ратных рам относительно центра опалу ки. Если домкрат опережает перемещение центра опалубки, то напряжение н выходе его усилителя будет положител ным, а если отстает - отрицательным. Формула изобретения Система для автоматического управления скользящей опалубкой, содержащая подъемные домкраты, блоки управления электроприводом каждого домкрата и программный задатчик подъема, отличающаяся тем, что, с целью повышения надежности работы системы, она снабжена высотомером, установленным в центре опалубки, усилителями, сумматором и датчиками уровня, причем подъемные домкраты через последовательно соединенные соответствующие датчик уровня и усилитель подключены к одному из входов соответствующего блока управления электроприводом домкрата, другой вход которого соединен с выходом сумматора, один нз входов сумматора подключен к программному задатчику подъема, а другой вход через общий усилитель соеданен с высотомером. , Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР 502105, М., кл Е 04 6 11/22, 1970. 2.Динеску Т. Скользящая опалубка. М., Стройиэдат, 1975, с. 171-174.
If
t-n
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| Устройство автоматизации подъема опалубки | 1980 |
|
SU960406A1 |
| Устройство для управления электроприводом робота | 1988 |
|
SU1553376A1 |
| Устройство для управления электроприводом робота | 1989 |
|
SU1664548A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод постоянного тока | 1987 |
|
SU1413697A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Устройство для управления электроприводом | 1984 |
|
SU1187149A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |