Изобретение относится к электротехнике и может быть использовано для регулирования электронриводов постоянного тока, применяемых в металлургии, химической промышленности, машиностроении.
Целью изобретения является повышение точности регулирования скорости электропривода путем компенсации параметрических и внешних возмупдений при ограниченной частоте скользяш,его режима.
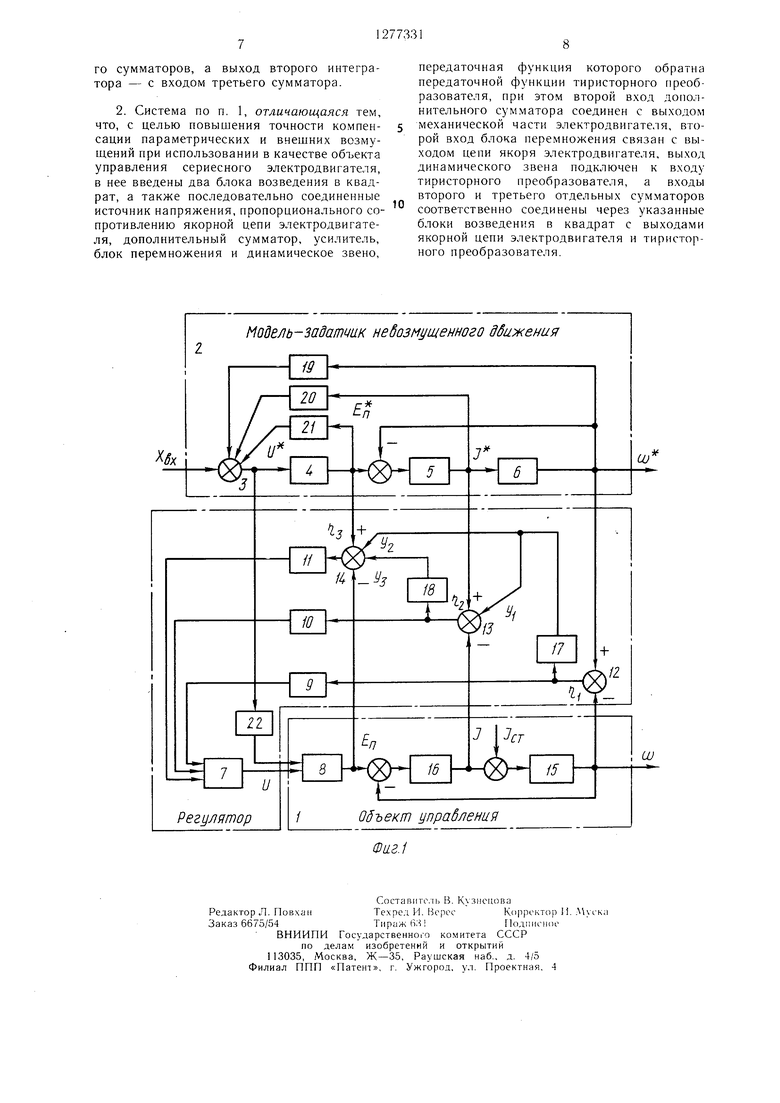
На фиг. 1 приведена блок-схема системы автоматического регулирования скорости электропривода; на фиг. 2 - то же, при использовании в качестве объекта управления сериесного электродвигателя.
Система (фиг. 1) содержит электропривод 1, выполненный по системе преобразователь - двигатель, модель 2 замкнутого электропривода, состояшую из последовательно включенных сумматора 3, моделей 4- 6 соответственно тиристорного преобразователя, цепи якоря и механической части электродвигателя, выходы которых соединены с входами сумматора 3, релейный элемент 7, выход которого соединен с входом тиристорного преобразователя 8, а входы подключены к выходам усилителей 9-11, каждый из которых через отдельный сумматор 12, 13 или 14 соединен соответственно с выходами механической части 15 электродвигателя и ее модели 6, с выходами якорной цепи 16 электродвигателя и ее модели 5, с выходами тиристорного преобразователя 8 и его модели 4.
Система содержит также интеграторы 17 и 18, вход первого из которых подключен к выходу сумматора 12, а вход второго - к выходу сумматора 13, выход интегратора 17 соединен с входами сумматоров 13 и 14, а выход интегратора 18 - с входом сумматора 14.
Модель 2 электропривода содержит усилители 19-21, включенные в цепь обратной связи по регулируемой координате, и уси;1и- тель 22, включенный между выходом сумматора. 3 модели 2 электропривода и входом тиристорного преобразователя 8.
Система автоматического регулирования, представленная на фиг. 2, помимо элементов, изображенных на фиг. 1, содержит два блока 23 и 24 возведения в квадрат, а также последовательно соединенные источник 25 напряжения, пропорционального сопротивлению якорной цепи электродвигателя, сумматор 26, усилитель 27, блок 28 перемножения и динамическое звено 29, передаточная функция которого обратна передаточной функции тиристорного преобразователя 8, при этом второй вход сумматора 26 соединен с выходом механической части 15 электродвигателя, второй вход блока 28 перемножения связан с выходом цепи якоря электродвигателя, выход динамического звена 29 подключен к входу тиристорного преобразователя 8, а входы сумматоров 13 и 14
соединены соответственно через блоки 23 и 24 возведения в квадрат с выходами якорной цепи 16 электродвигателя и тиристорного преобразователя 8. Сериесный электро- двигатель в электроприводе 1 содержит дополнительное звено 30, учитывающее цепь возбуждения.
Входной сигнал /Yex определяет задание в статике (заданный уровень стабилизации скорости w). В модели 2 формируются желаемые значения , /, 1и(невозмуш,енные движения) фазовых координат fn, электропривода. Сформированные таким образом координаты , /,«) модели 2 представляют собой задания в динамике и статике коор5 динатам Еч, I, uJ электропривода.
Система работает следующим образом. До подачи входного сигнала Хв на модель 2 желаемые значения фазовых координат Е, /, tJt модели равны нулю, следовательно, на вход модели 4 тиристорного пре0 образователя и тиристорный преобразователь 8 поступает сигнал управления U О, на входы релейного элемента 7 поступают нулевые сигналы, релейный элемент работает в скользящем режиме, причем выход
его равен нулю, поэтому на вход тиристорного преобразователя 8 поступает нулевой суммарный сигнал. После подачи входного сигнала Л пх на выходе сумматора 3 модели 2 посредством усилителя 19-21 формируется сигнал управления U Хвх-k g(s)
0 , одновременно поступающий на входы модели электропривода (вход модели 4 тиристорного преобразователя) и электропривода 1 посредством усилителя 22. При этом одновременно на выходах моделей 4, 5 и 6 при помощи сумматора 3 формируются
желаемые значения (невозмущенные движения) ni, /, (ja фазовых координат электропривода, которые могут быть измерены, и текущие (истинные) значения Е«, , (jO фазовых координат электропривода на выходах звеньев 8, 15 и 16. В сумматорах 12, 13
и 14 вычисляются отклонения (координаты возмущенного движения) г||-г|з текущих значений фазовых координат электропривода от их желаемых значений, которые посредством усилителей 9-11 поступают на
, входы релейного элемента 7.
Если модель 2 точно моделирует динамические свойства электропривода, на вход электропривода 1 не действуют внешние возмущения и не меняются параметры электропривода, то сигнал управления LJ обеспе0 чивает Ян, / : /, ий (при использовании в качестве как релейного элемента, так и линейного усилителя вместо него. На входы релейного элемента 7 поступают нулевые сигналы. Таким образом, при идентичности свойств электропривода и его моде5 ли регулирование электропривода посредством усилителя 22 ведется управляющим воздействием модели LI, которое по отношению к электроприводу 1 является про
граммным и которое обеспечивает реализацию координатами Eh, /, w электропривода их программных (желаемых) значений Е, 1,л). Поскольку при этих условиях не возникает возмущающее движение, т. е. ц Ti2 О, то дополнительное управление и с выхода релейного элемента 7, работающего в скользящем режиме, равно нулю.
Если модель не идентична электроприводу, меняются его параметры или на него действуют внешние возмущения, то действи- тапьные значения фазовых координат не равны желаемым, возникает возмущенное движение, координаты г||, TIO, г|з которого не равны нулю. Сигналы отклонения ц, 1)2, т)з через усилители 9-11 поступают на входы релейного элемента. Поскольку на вход релейного элемента 7 не подан входной сигна т Хау. и подключены только выходы усилителей 9-11, то выбором их параметров можно обеспечить работу релейного элемента в скользяпхем режиме при любом Х«. В результате на выходе релейного элемента 7 формируется дополнительное управление
и --sign(/29Tli + А||Т1з),
стремящееся погасить возмущенное движение электропривода. Это управление обеспечивает компенсацию влияния изменений параметров тиристорного преобразователя 8 и внен1них возмущений, приложенных к его входу. Однако влияние иных возмущений (например, изменение параметров якорной цепи от нагрева, статического момента, изменение момента инерции) не может быть скомпенсировано достаточно точно без интеграторов 17 и 18. При работе системы при отсутствии интеграторов и действий статической нагрузки появление статического тока приводит к тому, что скорость начинает уменьшаться и на выходе первого сумматора 12 формируется положительная ошибка r|i (I). Стремясь отработать эту ошибку, релейный элемент 7 в скользя- щем режиме увеличивает воздействие U на вход тиристорного преобразователя И, что естественно приводит к увеличению координат п, / и к формированию на выходах второго 13 и третьего 14 сумматоров отри- нательных ошибок г|2 , Лз (о. Таким образом, в системе возникают антагонистические противоречия и релейный элемент 7 формирует ко.мпромиссное управление, которое затягивает переходный процесс и способствует наличию статической ошибки в установившемся режиме. Подключение интеграторов 17 и 18 устраняет эти противоречия, обеспечивает сокращение длительности переходных процессов и устраняет статические ошибки. Действительно, если действует /, то , но задание на ток равно сумме (/ + (/|), а задание на п равно ( у- + УЗ). За счет выбора коэффициентов усиления усилителей 10 и 11 и
интегратора 18 можно всегда обеспечить одинаковые знаки отклонений г||, ц-2, цэ, и устранить противоречивую информацию, поступающую на вход релейного элемента 7, а интеграторы 17 и 18 устраняют статические ошибки по координатам со, / в установившемся режиме. Минимум ошибки т|з в установившемся режиме обеспечивается за счет скользящего релейного элемента 7 и поэтому можно не подключать еще один интегратор с выхода сумматора 14 на вход релейного элемента 7. Если же необходимо полностью устранить статическую ощибку Т1з, то такой интегратор может быть подключен. Введение интеграторов 17 и 18 аналогично решает задачу и при действии иных возмущений.
Таким образом, использование программного управления И приводит к тому, что ресурс релейного элемента используется только на компенсацию влияния меняющихся условий работы электропривода. Использование дополнительных интеграторов 17 и 18 позволяет и при наличии одного релейного элемента обеспечить независимость движения выходной координаты системы от меняющихся в щироком диапазоне параметров электропривода и действующих на его входы внешних возмущений.
В системе, изображенной на фиг. 2, на вход сумматора 26 подан сигнал R, равный относительны.м потерям мощности и цепи якоря двигателя. Необходимость введения компенсации объясняется следующим.
Для электродвигателя последовательного возбуждения справедливо соотношение
dl Е , dt LL
(i;
Параметры этого инерционного звена зависят от угловой скорости. Для компенсации этой зависимости вводят дополнительное воздействие на вход якорной цепи 16
, ()/; , (2)
Тогда уравнение (1) с учетом (2) преобразуется к виду
dl IP
(3)
и, следовательно, параметры якорной цепи уже не зависят от угловой скорости. С учетом того, что дополнительное воздействие i должно формироваться тиристорным преобразователем 8, переносят воздействие Е на вход преобразователя 8 и находят, что окончательное компенсирующее воздействие, приложенное к входу преобразователя 8. равно
О , Щр)(.
(4)
где W(p - обратная передаточная функция тиристорного преобразовате.:1я. Уравнение (4) реализуется блоками 26 29.
До подачи входного сигна.ча Хах на моель 2 желаемые значения фазовых коордиат , /, to модели равны нулю, иоэтому и О, на вход релейного э;1емента 7 но- тупают нулевые сигналы и он работает скользящем режиме, сигнал на его выходе авен нулю. Поэтому на вход нреобразова- еля 8 поступает нулевой суммарный сигнал. После нодачи Хк на выходе сумматора 3 ормируется управление U, одновременно поступающее на вход модели 4 преобразователя и через усилитель 22 - на вход преобразователя 8. Коэффициент усиления силителя 22 вырабатывается так, чтобы в режиме холостого хода обеспечить блоками 23 и 24 возведение в квадрат примерных равенств , , . В сумматорах 12-14 вычисляются отклонения iis, которые через усилители 9-11 поступают на входы релейного эле.мента 7. Если система в режиме холостого хода настроена так, что г|| Т12 Пз О, и О, то управление U-2 с выхода релейного элемента 7 нулю и управление электронриводог 1 ведется воздействием U, которое но отношению к электроприводу 1 является программным. Если изменяется скорость электропривода или действует статическая нагрузка, то действительные значения фазовых координат ЕП, , ш не равны их заданным значениям (невозмущенным движениям) E f,, /, со, в системе возникает возмущенное движение, координаты г - цз которого не равны нулю. Сигналы Отклонения через усилители 9-11 поступают на входы релейного элемента 7, который все1 да работает в скользящем режиме и формирует дополнительное управление U-, стремящееся погасить возмущенное движение элекгро- привода. Это управление обеспечивает компенсацию влияния изменений нараметров преобразователя 8 и вненишх возмунимшй, приложенных к его входу. Однако влияние иных возмущений (изменение параметров двигателя при из.менении скорости, статического момента, момента инерции) -ге может быть скомпенсировано достаточно точно, если не использовать интеграторы 17 и 18 и блоки 26-29.
Как следует из (Г), (2) и (4), вспомогательное компенеирующее управление (4), реализуемое блоками 26-29, обеспечиваег компенсацию переменных параметров цепи якоря 16, которая описывается после введения и, не уравнением (1), а уравне П1ем (3), т. е. теперь параметры инерционного звена не зависят от угловой скорости двигателя. Если не использовать интеграторы 17 и 18, то в системе возникают статические ощибки по координатам и затягивается переходный процесс.
Пусть под влиянием статической нагрузки скорость ш на выходе механической части 15 двигателя уменьшилась. Тогда на выходе сумматора 12 ошибка т со -(i)0.
Отрабатывая эту oi ибку, релейный элемент 7 в скользяще.1 режиме увеличивает воздействие U-, что г риводит к формированию ошибок Ц - 11 -п - - .
В системе возникают противоречия, что ведет к затя1 ивапию переходного процесса и .формированию статических он1ибок. При помощи интеграторов 17-18 противоречия устраняются, сокращается длительность переходных процессов. Если у.меньшилась скорость со, то задание на ток равно , на напряжение - у., + уз. За счет выбора коэффициептов уси.чения соответствующих входов сумматоров 13 и 14 можно всегда обеепечить одинаковые знаки отклонений Ti --Ti:i. Малоегь он.1ибки т. обеспечивается за счет скс льзящего режима релейного элемента 7, по нри необходимости можно вместо усилителя I 1 исно.чьзовать
нрог1Орциопа.:1Ьно-интегральное звено.
Таким образом, использование компенсации позволяет устранить нелинейную зависимость параметров якорной цепи от угловой скорости двигателя, а введение блоков 23 и 24 перемножения и интеграторов 17 и 18 позволяет управлять скоростью сериеспого двигателя при обеспечении 1анеред заданного качества регулирования, т. е. обеспечить независимость выходной координаты от меняющихся в щироком диапазоне параметров э;1ектропривода и впешппх возму
Формула изобретения
1. Система автомсггического регу.-1ировапия скорости электропривода, вы 1олнеппого по системе тиристорн1э1й преобразователь --- двигатель, содержащая моде.чь замкнутого электронриво.з.а, состоящую из пос,1едова- тельно включенных сумматора, .моделей
преобразователя, цепп якоря и механичеекой пасти э:1ектродвигат1 ля, в.ыходы которьгх соединены с вхо.аами указанного сумматора, релейный элемент, выход которого соединен с входом тиристор ото преобразователя, выходы которого подключены к трех усилителей, каждый из которых через от;1ельный сумматор соединен соответственно с выходами мехапмческой части электродвигателя и ее модели, с выходами якорной цегщ электродвигателя и ее модели и с выходами тиристор1 ого | реобразователя и его мол,ели, оглияиюшаяся тем, что, с целью повьпнения точности регулирования скорости путем компенсации параметрических и BHCin- iiHx возмущений при ограпичеппой частоте скользящего режима, в нее введены два интегратора, входы которых подключены соответственно к выходам первого п второго отделыц:,гх сумматоров, выход первого иптег- ратора соедипс с вхсдамп второго третьего сумматоров, а выход второго интегратора - с входом третьего сумматора.
2. Система по п. 1, отличающаяся тем, что, с целью повышения точности компенсации параметрических и внешних возму- шений при использовании в качестве объекта управления сериесного электродвигателя, в нее введены два блока возведения в квадрат, а также последовательно соединенные источник напряжения, пропорционального сопротивлению якорной цепи электродвигателя, дополнительный сумматор, усилитель, блок перемножения и динамическое звено.
передаточная функция которого обратна передаточной функции тиристорного преобразователя, при этом второй вход дополнительного сумматора соединен с выходом механической части электродвигателя, второй вход блока перемножения связан с выходом цепи якоря электродвигателя, выход динамического звена подключен к входу тиристорного преобразователя, а входы второго и третьего отдельных сумматоров соответственно соединены через указанные блоки возведения в квадрат с выходами якорной цепи электродвигателя и тиристорного преобразователя.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
| Электропривод постоянного тока | 1982 |
|
SU1061228A1 |
| Электропривод постоянного тока | 1984 |
|
SU1262672A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
Изобретение относится к электротехнике и может быть использовано в ycTpoficiBax. применяемых в металлургии и химической промышленности. Целью изобретения является повышение точности регулирования. Использование компенсации иозволяет устранить нелинейную зависимость параметров якорной цепи от угловой скорости элект - двигателя, а введение блоков 23 и 24 перемножения и интеграторов 17 и 18 позволяет управлять скоростью сферического двигателя при обеспечении наперед заданного качества регулирования, т. е. обеспечить независимость выходной координаты от меняющихся в широком диапазоне HafiaMeriioB электропривода и вне1пних возму1цени11. 1 3. п. ф-лы, 2 ил. ю (Л с: ГчЭ -vj со 00 
| Зеленов А | |||
| Б | |||
| Синтез и исследование релейных систем управления электроприводом постоянного тока.-Электромеханика, Известия вузов | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Ручная тележка для реклам | 1923 |
|
SU407A1 |
| Загороднюк В | |||
| Т., Жиляков В | |||
| И., Садовский А | |||
| В | |||
| Синтез регуляторов электроприводов промышленных роботов.-Системы управления горными мапшнами | |||
| Межвузовский сб., Новочеркасск, 1979, с | |||
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
