00
|
н«ь 4 О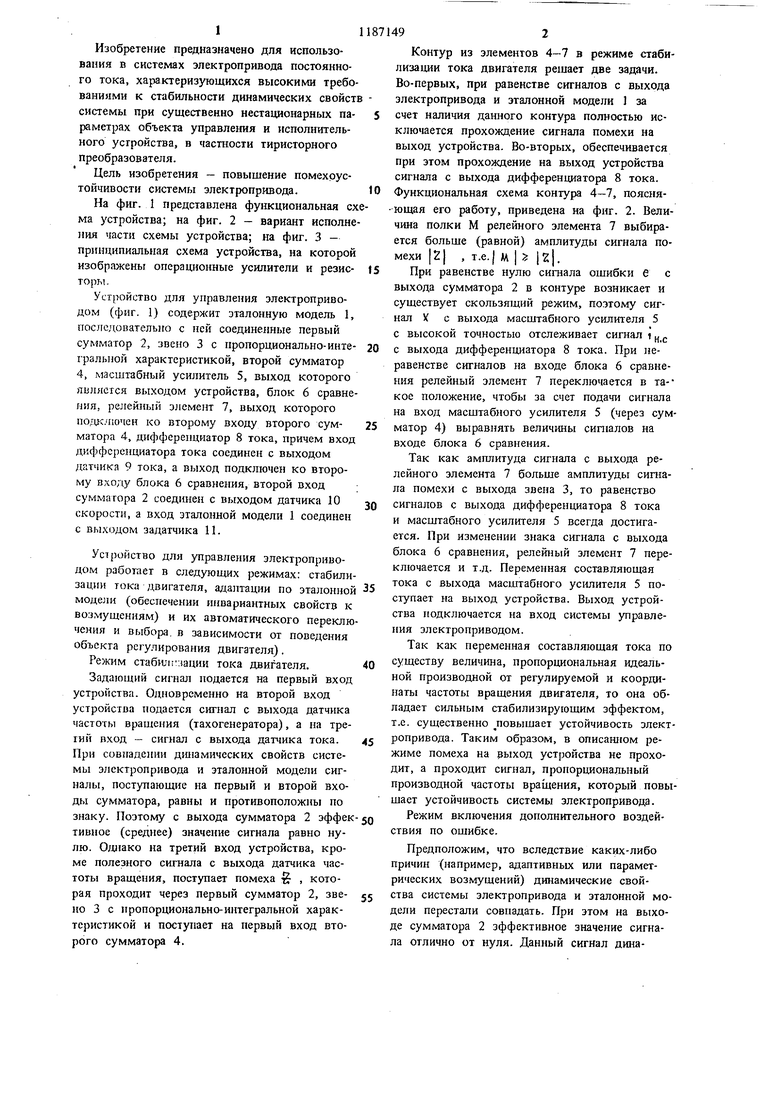
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для управления электроприводом | 1984 |
|
SU1196811A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Электропривод постоянного тока | 1982 |
|
SU1099370A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU928300A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ, содержащее датчик скорости и последовательно соединенные задатчики, эталонную модель, первый сумматор, звено с пропорционально-интегральной характеристикой, второй сумматор, масштабный усилитель, блок сравнения, релейный элемент, выход которого подключен к второму входу второго сумматора, отличающ-еес я тем, что, с целью повышения помехоустойчивости электропривода при сохранении высоких инвариантных свойств в условиях адаптивных и параметрических возмущений, оно содержит последовательно соединенные датчик тока и дифференциатор, тока, выход которого подключен к второму входу блока (Л сравнения.
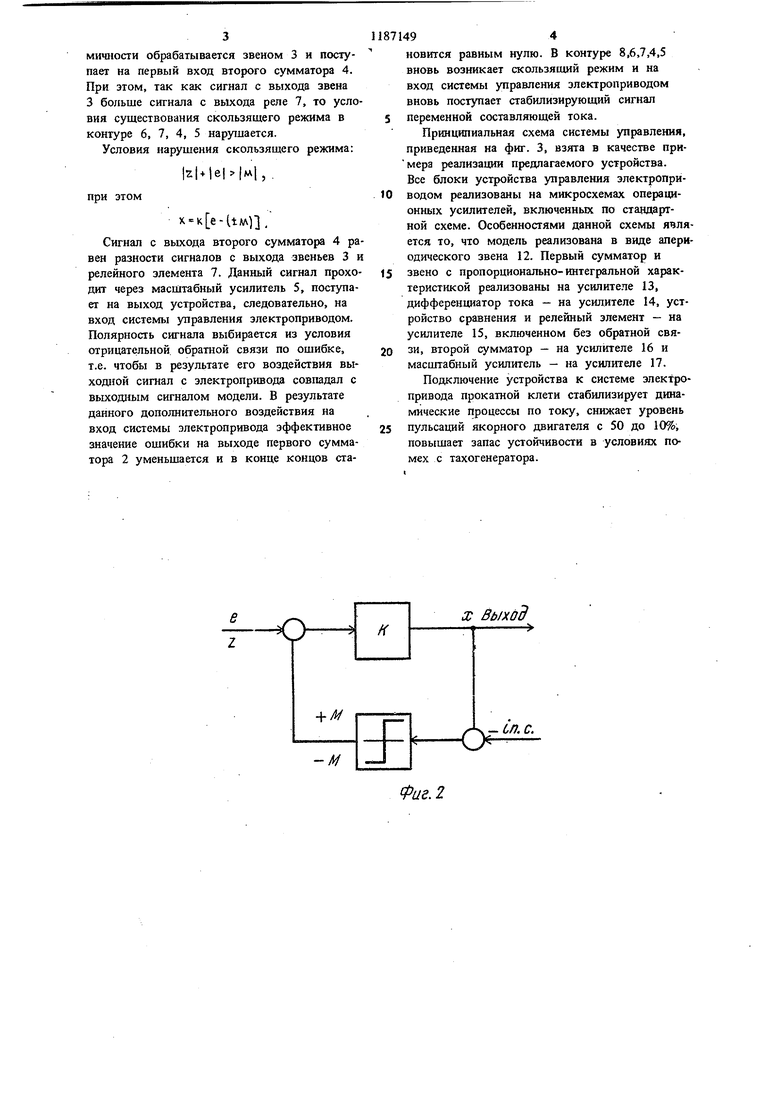
/ЛиФФерещиатоо така Изобретение предназначено для использования в системах электропривода постоянного тока, характеризующихся высокими требованиями к стабильности динамических свойст системы при существенно нестационарных параметрах объекта управле1гая и исполнительного устройства, в частности тиристорного преобразователя. Цель изобретения - повышение помехоустойчивости системы электропривода. Иа фиг. 1 представлена функциональная сх ма устройства; на фиг. 2 - вариант исполне ния части схемы устройства; на фиг. 3 принципиальная схема устройства, на которой изображены операционные усилители и резисторы. Усгройетво для управления электроприводом (фиг. 1) содерхсит эталонную модель 1, последовательно с ней соединенные первый сумматор 2, звено 3 с пропорционально-интегральной характеристикой, второй сумматор 4, масштабный усилитель 5, выход которого является выходом устройства, блок 6 сравне ния, релейный элемент 7, выход которого полислючен ко второму входу второго сумматора 4, дифференциатор 8 тока, причем вход дифференциатора тока соединен с выходом датчика 9 тока, а выход подключен ко второму входу блока 6 сравнения, второй вход сумматора 2 соединен с выходом датчика 10 скорости, а вход эталонной модели 1 соединен с выходом задатчика 11. Устройство для управления электроприводом работает в следующих режимах: стабили зации тока двигателя, адаптации но эталонной модели (обеспечении инвариантных свойств к возмущениям) и их автоматического переклю чения и выбора, в зависимости от поведения объекта регулирования двигателя). Режим стабШ1г:иации тока двигателя. Задающий сигнал подается на первый вход устройства. Одновременно на второй вход устройства подается сигнал с выхода датчика частоты вращения (тахогенератора), а на третий вход - сигнал с выхода датчика тока. При совпадении дш1амических свойств системы электропривода и эталонной модели сигналы, поступающие на первый и второй входы сумматора, равны и противоположны по знаку. Поэтому с выхода сумматора 2 эффек тивное (среднее) значение сигнала равно нулю. Однако на третий вход устройства, кроме полезного сигнала с выхода датчика частоты Вращения, поступает помеха й- , которая проходит через первый сумматор 2, звено 3 с пропорционально-интегральной характеристикой и поступает на нервый вход второго сумматора 4. 92 Контур из элементов 4-7 в режиме стабилизации тока двигателя рещает две задачи. Во-первых, при равенстве сигналов с выхода электропривода и эталонной модели 1 за счет наличия данного контура полностью исключается прохождеиие сигнала помехи на выход устройства. Во-вторых, обеспечивается при этом прохождение на выход устройства сигнала с выхода дифференциатора 8 тока. Функциональная схема контура 4-7, поясняющая его работу, приведена на фиг. 2. Величина полки М релейного элемента 7 выбирается больще (равной) амплитуды сигнала помехи |2| , т.е.| М I , г. При равенстве нулю сигнала ощибки е с выхода сумматора 2 в контуре возникает и существует скользящий режим, поэтому сигнал X с выхода масштабного усилителя 5 с высокой точностью отслеживает сигнал i с выхода дифференциатора 8 тока. При неравенстве сигналов на входе блока 6 сравнения релейный элемент 7 переключается в такое положение, чтобы за счет подачи сигнала на вход масштабного усилителя 5 (через сумматор 4) выравнять величины ситалов на входе блока 6 сравнения. Так как амплитуда сигнала с выхода релейного элемента 7 больще амплитуды ситала помехи с выхода звена 3, то равенство сигналов с выхода дифференциатора 8 тока и масштабного усилителя 5 всегда достигается. При изменении знака сигнала с выхода блока 6 сравнения, релейный элемент 7 переключается и т.д. Переменная составляющая тока с выхода масштабного усилителя 5 поступает на выход устройства. Выход устройства подключается на вход системы управления электроприводом. Так как неременная составляющая тока по существу величина, пропорциональная идеальной производной от регулируемой и координаты частоты вращения двигателя, то она обладает сильным стабилизирующим эффектом, т.е. существенно ювышает устойчивость электропривода. Таким образом, в описанном режиме помеха на рыход устройства не проходит, а проходит сигнал, пропорциональный производной частоты вращения, который повыщает устойчивость системы электропривода. Режим включения дополнительного воздействия по ошибке. Предположим, что вследствие каких-либо причин (например, адаптивных или параметрических возмущений) динамические свойства системы электропривода и эталонной модели перестали совпадать. При этом на выходе сумматора 2 эффективное значение сигнала отлично от нуля. Данный сигнал динаМИЧ1ЮСТИ обрабатывается звеном 3 и поступает на первый вход второго сумматора 4. При этом, так как сигнал с выхода звена 3 больше сигнала с выхода реле 7, то условия существования скользящего режима в контуре 6, 7, 4, 5 нарущается.
Условия нарушения скользящего режима:
|г|Че| |м1, . нри этом
x K e-ttM,
Сигнал с выхода второго сумматора 4 равен разности сигналов с выхода звеньев 3 и релейного элемента 7. Данный сигнал проходит через масщтабный усилитель 5, поступает на выход устройства, следовательно, на вход системы управления электроприводом. Полярность сигнала выбирается из условия отрицательной обратной связи по ошибке, т.е. чтобы в результате его воздействия выходной сигнал с электропривода совпадал с выходным сигналом модели. В результате данного дополнительного воздействия на вход системы электропривода эффективное значение ошибки на выходе первого сумматора 2 уменьшается и в конце концов стаО
М
-м
1871494
новится равным нулю. В контуре 8,6,7,4,5
вновь возникает скользящий режим и на вход системы управления электроприводом вновь поступает стабилизирующий сигнал 5 переменной составляющей тока.
Принципиальная схема системы управления, приведенная на фиг. 3, взята в качестве примера реализации предлагаемого устройства. Все блоки устройства управления электропри10 водом реализованы на микросхемах операционных усилителей, включенных по стандартной схеме. Особенностями данной схемы является то, что модель реализована в виде апериодического звена 12. Первый сумматор и 15 звено с пропорционально-интегральной характеристикой реализованы на усилителе 13, дифференциатор тока - на усилителе 14, устройство сравнения и релейный элемент - на усилителе 15, включенном без обратной свя20 зи, второй сумматор - на усилителе 16 и масштабный усилитель - на усилителе 17.
Подключение устройства к системе электропривода прокатной клети стабилизирует динамические процессы по току, снижает уровень 25 пульсаций якорного двигателя с 50 до 10%, повышает запас устойчивости в условиях помех с тахогенератора.
X Выход
СП. с.
Фиг. 2
Фаг.З
| Система управления | 1978 |
|
SU798712A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления электро-пРиВОдОМ | 1979 |
|
SU843140A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
