1547 УСТРОЙСТВО АВТОМАТИЗАЦИИ ПОДЪЕМА ОПАЛУБКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для автоматического управления скользящей опалубкой | 1976 |
|
SU585263A1 |
| Устройство для автоматического подъема скользящей опалубки | 1976 |
|
SU613057A1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Устройство для управления буровым станком | 1978 |
|
SU748352A1 |
| Система гидродинамического нивелира | 1982 |
|
SU1051372A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
| Способ определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и устройство для определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории | 2019 |
|
RU2724366C1 |
| СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНЫХ ТРЕХСЛОЙНЫХ ОГРАЖДАЮЩИХ И ВНУТРЕННИХ СТЕН ЗДАНИЯ И ОПАЛУБОЧНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2401918C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2292062C2 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
Изобретение относится к области автоматизации строительного прризводстаа и может быть использовано для автоматизации подъема скользящих опалубок при возведении монолитных железобетонных .сооружений.
Известно устройство длЯ автоматического управления пoдъeivюм скользящих опалубок, в котором горизонтирование опалубки осуществляется дискретно через определенные интервалы высоты подъема путем выключения дом цратов с помощью концевых выключйтелей, установленных посредством геодезических приборов в одной плоскости и закрепленных на домкратных стержнях 1. ,
Недостатком этого устройства является необходимость частой перестановки концевых выключателей на следующий уровень, что знаительно увеличивает непроизводительные потери времени. Кроме того, при эксплуатации этого устройства нарушение горизонтальности опалубки в связи с просадкой домкратных стержней, а также исключена возможность автоматического исправления допущенных СН1Ш60К в горизонтировании опалубки.
Наиболее близким к предлагаемому является устройство автоматизации подъема опалубки, включающее домкраты, приводы которых соединены с соответствующими блокакш управления, и гидростатическую систему нивелирования, содержащую управляющий сосуд, укрепленный на управляющем домкрате и измерительные сосуды, установлен10ные на домкратах 2.
Недостатками, известного устройства являются недостаточная точность горизонтирования опалубки из-за низкой чувствительности электродных датчи15ков уровня, а также невозлюжность стабилизации положения домкратов в режимах коррекции отклонений опалубки, когда требуется накренить плос кос1ъ домкратов. Эти недостатки снижают качество возведения монолитных сооружений, не позволяют достичь . полной автоматизации подъема скользящих опалубок и снижают эффективность их применения.
25
Целью изобретения являетсяповышение эффективности контроля за счет стабилизации подъема.опалубки.
Поставленная цель достигается тем, что устройство автоматизацией подъема
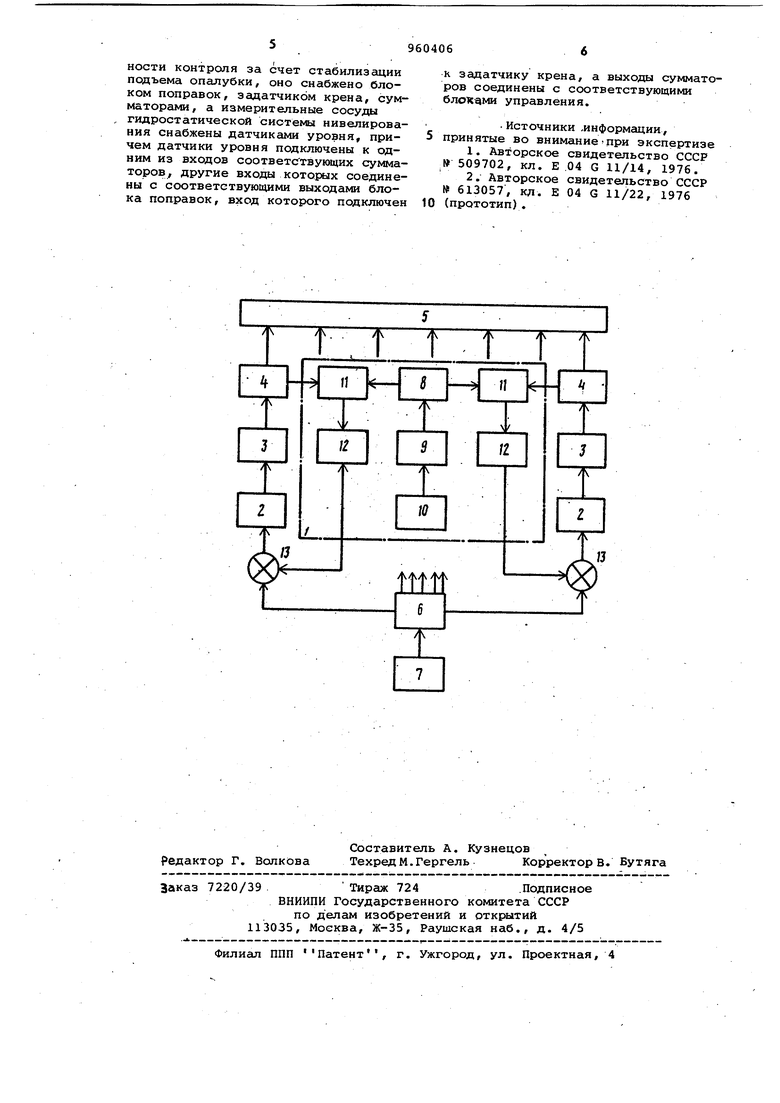
опалубки, включающее домкраты, приводы KOTOjxJX соединены с соответству ющими блоками управления, и гидростатическую систему нивелирования, содержащую управляющий сосуд, укрепленный на управляющем домкрате и измерительные сосуды, установленные на домкратах, снабжено блоком поправок, задатчиком крана сумматорами, а измерительные сосуды гидростатичес кой системы нивелирования снабжены датчиками уровня,, причем датчики уровня подключены к одним из входов соответствующих сумматоров, другие входы которых соединены с соответствующими выходами блока поправок, вход которого подключен к задатчику крена, а выходы сумматоров соединены с соответствующими блоками управления. На чертеже схематично изображено предлагаемое устройсхво. Устройство содержит гидростатическую систему 1 нивелирования, блоки 2 управления, связанные с приводами 3 домкратов 4, на которые опира ется опалубка 5, блок б поправок и соединенный с ним задатчик 7 крена. Гидростатическая система 1 нивелирования состоит из управляющего сосуда 8, установленного, на домкрате 9, при вод которого связан с блоком 10 управления подъемом, и измерительных сосудов 11 с линейными датчиками 12 уровня, выхода которых связаны через сумматоры 13 с блоками 2 управления. Управляющий и измерительные сосуды соединены в систему соойцающихся сосудов, а домкрат 8 системы нивелирования не связан с опалубкой. Второй вход сумматора 13 связан с соответствующими выходами блока 6 .поправок. Устройство работает следующим образом.. При горизонтальном положении скол зящей опалубки нулевые отметки управляющего 8 и всех измерительных 11 сосудов располагаются в одной плоскости, а, следовательно, сигналы на выходе датчиков 12 уровня рдвны нулю Подъем опалубки задается с .блока 10 управления подъемом, который управляет приводом 9 управляющего сосуда 8. При подаче команды на подъем опалубки блок 10 управления включает привод 9, который осуществляет подъе управляющего сосуда с определенной скоростью. При этом уровень жидкости в измерительных сосудах 11 повышается и на выходе датчиков 12 уровня появляются положительные сигналы, которое через сумматоры 13 подаются на вход бЛо-ков 2 управления. Последние включают привод 3 домкратов на Подъемопалубки. .Подъем опалубка про исходит до тех пор, пока осуществляется перемещение управляющего сосуда В, длительность циклов подъема которого задается блоком 10 управления. Так как блоки 2 управления, привода 3, домкраты 4 и датчики 11 уровня образуют следящие системы, отслеживающие уровень жидкости в гидростатической системе нивелирования, то после выключения блоком 10 управления подъема управляющего сосуда В домкраты 4 опалубки продолжают подъем до тех пор, пока не достигнут уровня заданного управляющим сосудом, т.е. пока на выходе датчиков 12 уровня сигналы не будут равны нулю. После того как все домкраты 4 достигнут заданного управляющим сосудом 8 уровня и опалубка займет горизонтгшьное положение, блок 10 управления вновь включает привод 9 на подъем управляющего сосуда В и цикл подъема повторяется. Таким образом, горизонтирование опалубки выполняется периодически в конце каждого цикла подъема, .который задается блоком 10 управления подъемом. При необходимости коррекции положения опалубки с помощью задатчика 7 крена задаются угол и направление наклона опалубки. Эта информация с задат-. чика крена:поступает в блок поправок, который вычисляет для каждого домкрата 4 опалубки требуемое отклонение от горизонтальной плоскости, задаваемой гидростатической системой нивелирования. Сигналы с блока 6 вычисления поправок подаются на суМматоры 13, в KOTOEtJx происходит их алгебраическое суммирование с сигналами датчиков 12 уровня. В результате этого при окончании цикла подъема домкраты 4 смещаются относительно горизон- тальной плоскости на величину отклонения заданного блоком 6 поправок и образуют тем самым наклонную плоскость с требуемым углом наклона. Задание направления и угла наклона опалубки может осуществляться как вручную, так и с помощью управляющего устройства приПОЛНОЙ автоматизации работы опалубки.Таким образом, предлагаемое устройство позволит повысить эффективность контроля за счет стабилизации подъема опалубки. Формула изобретения Устройство автоматизации подъема опалубки., включающее домкраты, приводы которых соединены с соответствующими блоками управления, и гидростатическую систему нивелирования, содержащую управляющий сосуд, укрепленный на управляющем домкрате и измерительные сосуды, установленные на омкратах, отличаю-щее с я тем, что, с целью повышения зффективности контроля за счет стабилизации подъема опалубки, оно снабжено блоком поправок, задатчиком крена, сумматорами, а измерительные сосуды гидростатической системы нивелирования снабжены датчиками уровня, причем датчики уровня подключены к одним из входов соответствующих сумматоров, другие входы которых соединены с соответствующими выходами блока поправок, вход которого подключен
/
т .т т
к задатчику крена, а выходы сумматоров соединены с соответствующими блоками управления.
Источники .информации, принятые во вниманиеПри экспертизе
(прототип),
V /
