1
Изобретение относится к автоматическс му управлению и может быть использовано в радиотехнических системах, приборостроении и станкостроении.
Известна следящая система, в которсй для повышения ее точности с одной из обмоток синусно-косинусного вращающегося трансформатора (СКВТ) через преобразователь и корректирующий блок на вход усилителя вводится компенсирующий сигнал l.
Недостатком известной системы является ухудшение точности .системы из-за изменения крутизны выходной характеристики СКВТ-датчика.
Известна также следящая система, в которую для повышения ее точности дополнительно вводится эталлонная модель и меха низм настройки корректирующих звеньев 2
Однако эта система обладает недостаточной точностью.
Из известных следящих систем наиболее близкой по технической сущности является следящая система, содержащая СКВТ-приемник, входы которого связаны с выходами СКВТ-датчика, а выход через последователь
но соединенные усилитель и исполнительный механизм подключен к объекту регулирования зу
Целью изобретения является повышение точности системы при изменении крутизны выходной характеристики СКВТ-дагчика.
Это достигается тем, что следящая система содержит блок выработки модуля, входы которого подсоединены к выходам СКВТдатчика, а выход связан с управляющим входом усилителя.
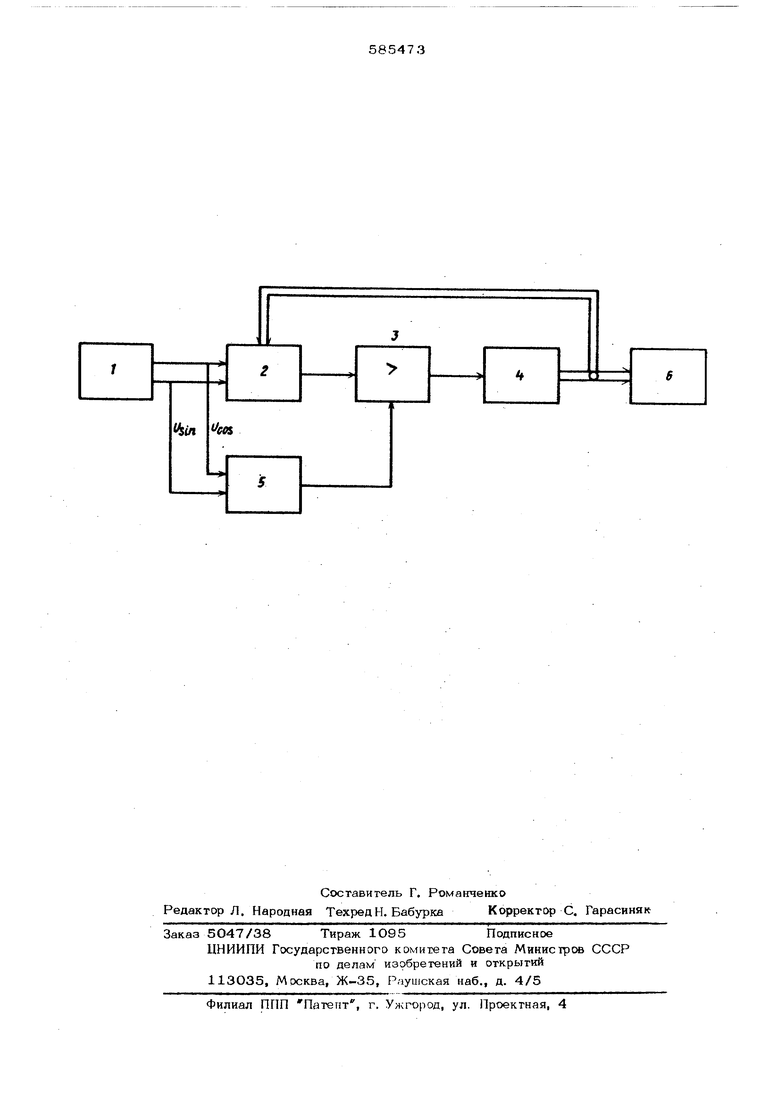
На чертеже изображена функциональная схема следящей системы.
Следящая система содержит СКВТ-дат чик 1, СКВТ-приемник 2, усилитель 3, исполнительный механизм 4, блок 5. выработки модуля, объект регулирования 6.
Следящая система работает следующим образом.
В исходном состоянии.напряжение рассогласования с выходной обмотки СКВТприемника 2 .поступает на вход усилителя с управляемым коэффициентом усиления) 3 который в исходном состоянии имеет коэффициент усиления Ку. Прн работе системы напряжения, снимае мые с синусной н косинусной обмоток СКВТ-датчика 1, соответственно равны ,«Un-K -напряжение питания датчика{ -крутизна выходной характеристики, датчика; Л - угол поворота датчика. Если сигналы sin и пропустит черва блок 5 выработки модуля по двум еоставлтощим, то на его выходе получим и. Ж slfl п Из полученного выражения следует, что напряжение -на выхсдзе блсжа 5 выработки модули тфрттршгонально крутизне выходной характеристики СКВТ-датчика-1. Поскол ку в процессе эксплуатации системы происходит изменение крутизны выходной характеристики СКВТ-датчика, то блок 5 выработки модуля является чувствительным элем TOMj йзмерякшнм СКВТ-датчика, ч особенно важно при использсвании СКВТприемников с одной выходной сигнальной обмоткой. При увеличении крутизны выходной хара теристики СКВТ-датчика 1 происходит увеаичение напряжения if на выходе блока выработки модуля 5, которое, воздействуя на управляющий вход усилителя с управляемым ковффициентом усиления 3, уменьшае коеффициенг усиления Ку усилителя 3, чтобы сохранить посгояиным соотношение Ку const где Kj - текущая крутизна выходной харак теристики СКВТ-датчнка. Аналогичный процесс происходит и при уменьшении крутизны выхадной характеристики СКВТ датчика 1. Предложенное техническое решение, позволяет поддерживать требуемую точность системы в заданных пределах при использовании датчиков углового положения CKBTj крутизна выходной характеристики которых изменяется в широких пределах. Формула изобретения Следящая система, содержащая синуснокосинусный вращающийся трансформатор ЗКВТ)-ч1риемник, входы которого связаны с выходами СКВТ-датчика, а выход через последсжательно соединенные усилитель и исполнительный механизм подключен к объекту регулирования, отличающаяс я тем, что, с целью повыщения точности системы при изменении крутизны выходной характеристики СКВТ-датчика, она содержит блок выработки модуля, входы которого подсоединены к выходам СКВТ-датчика, а выход связан с управляющим входом усилителя. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 244466, кл. О 05 В 11/32, 196в. 2.Патент США № 3.149.27О, кл. 318-28, 1864. 3.Азов А. К. и др. Усилители следящих систем переменного тока. Л., Энергия, 1972, с. 6, рис. 1-2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система переменного тока | 1973 |
|
SU478283A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Следящая система с комбинированным управлением | 1975 |
|
SU585472A1 |
| Следящая система | 1975 |
|
SU565281A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1968 |
|
SU217485A1 |