Изобретение относится к автоматизированным системам с цифровыми регуляторами и может найти применение в следящих системах с импульсными датчиками обратной связи и с цифровым за данием управляющего воздействия в виде унитарного или параллельного кодов. Известен цифровой электропривод, содержащий цифровой сумматор, элементы И, регистры, усилитель мощности, исполнительный двигатель, импульсный датчик и счетчик iJНедостатком устройства является невысокая надежность вследствие слож ности выполнения электронной части электропривода. Наиболее близким по технической сущности к предлагаемому является цифровой следящий электропривод, содержащий триггер знака, прямой выход которого соединен с первыми вход ми первого и второго элементов.. И-НЕ, выходы которых подключены соответственно к первым входам первого и второго элементов ИЛИ-НЕ, а инверс ный выход триггера знака соединен с первыми входами третьего и четвертого элементов И-НЕ, выходы которых по лючены ко вторым входам соответствен но первого и второго элементов ИЛИНЕ, и последовательно соединеннные реверсивный счетчик, преобразователь кода, усилитель мощности, исполнительный двигатель, импульсный датчик и блок обратной связи, первый выход которого подключен ко вторым входам первого и четве{5того элементов И-НЕ, второй выход - ко вторым входам второго и третьего элементов И-НЕ, а также задающий блок и пятый и шестой элементы И-НЕ. Недостатком электропривода, является невысокая надежность вследствие сложности импульсной формы сигналов управления триггером знака. Кроме того, в момент включения электропривода триггер знака может занять любое произвольное состояние, что при разбалансе аналоговых элементов системы регулирования может привести к положительной связи по каналу датчик счетчик - преобразователь кода и возникновению затухающих колебаний в системе регулирования. Это также снижает надежность, хотя в нормальном режиме работы после введения задания и установки триггера знака в нужное положение этого явления может не быть. .
Цель изобретения - повышение надежности электропривода.
Указанная цель достигается тем, что в него введены йедьмой и восьмо элементы И-НЕ, выходы которых подключены соответственно к суммирующему и вычитающему входам реверсивног четчика, первые входы - к выходам первого и вторОго- -элементов ИЛИ-НЕ, а вторые входы - ко второму и третьму выходам реверсивного счетчика, ттий выход которого через инвертор соединен с первыми входами пятого и шестого элементов И-НЕ, вторыми входами подключенных соответственно к первому и второму выходам блока обратной связи, а выходами - к первому и второму входам триггера знака, третий и четвертый входы которого соединены с соответствующим входом первого элемента ИЛИ-НЕ и выходом задающего блока, причем третий выход блока обрг.тной связи соединен с третьими входами первого, второго, третьего и четвертого элементов И-НЕ.
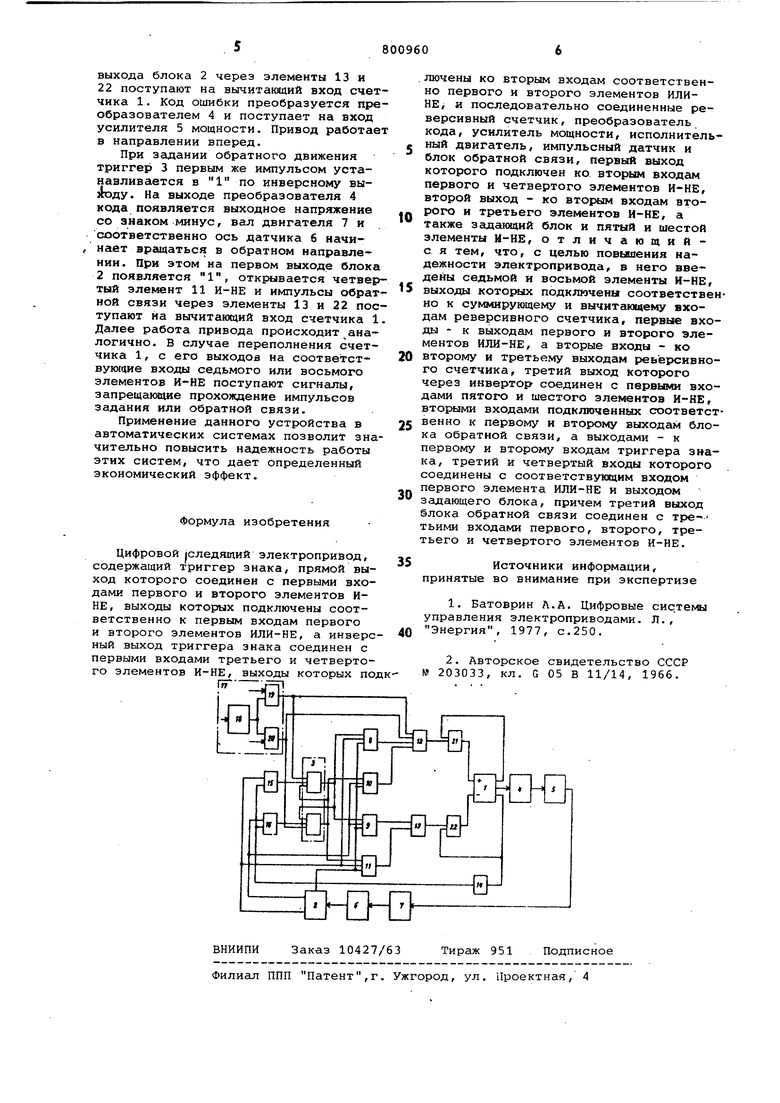
На чертеже приведена блок-схема цифрового следящего привода.
Привод содержит реверсивный счетчик 1, блок 2 обратной связи, триггер 3 знака, преобразователь 4 кода Усилитель 5 мощности, импульсный датчик б, исполнительный двигатель 1, первый - четвертый элементы 8И-НЕ, первый и второй элементы 12 и 13 ИЛИ-НЕ, инвертор 14, пятый и шестой элементы 15 и 16 И-НЕ, задающий блок 17, содержащий генератор 18 импульсов и ключи 19 и 20, а также седьмой и восьмой элементы 21 и 22 И-НЕ.
Электропривод работает, следующим образом.
При включении привода и установке .счетчика 1 в нуль триггер 3 устанавливается в состояние, соответствующее выходам блока 2. Предположим, что навтором выходе блока 2
В этом
присутствует логическая
случае на выходе элемента 16 И-НЕ появляется логический- О, а на выходе триггера 3 появляется логическая 1, На выходе преобразователя 4 кода при наличии числа в счетчике 1 выходное напряжение имеет зналс минус (обратное направление перемещения) . При наличии 1 на первом выходе блока 2 триггер 3 устанавливается в 1 по прямому выходу. На выходе преобразователя 4 кода выходное напряжение при наличии числа в счетчике 1 имеет знак плюс (прямое направление перемещения). Учитывая, что выходное напряжение преобразователя 4 кода при отсутствии задания является напряжением обратной связи по положению входной оси датчика б, при любом разбалансе со знаком плюс на втором выходе блока 2 появляется
1, при разбалансе со знаком минус на первом выходе блока 2 появляется 1.
Предположим, после включения привода и установки счетчика 1 в О появляется в аналоговой части привода эквивалентный разбаланс со знаком | «инус. В этом случае вал двигателя j начинает поворачиваться, в таком направлении, что на первом выходе блока 2 появляется 1, на прямом выходе триггера 3 устанавливается также 1 Импульсы обратной связи единичного уровня через первый элемент 8 И-НЕ, первый элемент 12 ИЛИ-НЕ, седьмой элемент 21 И-НЕ поступают на суммирующий вход счетчика, и на выходе пр образователя 4 кода появляется напряжение со знаком плюс, компенсирующее разбаланс. Ось датчика б повернется на угол, определяемый величиной разбаланса. Допустим разбаланс снова становится нулевым. Тогда вал двигателя, а следовательно, входная ось датчика б поворачиваться в обратном направлении. На втором выходе блока 2 появится 1, на прямом выходе триггера 3 сохранится 1, откроется второй элемент 9 И-НЕ и импусы обратной связи начнут поступать на вычитающий вход, счетчика 1. Выходное напряжение п зеобразователя 4 кода уменьшается до нуля и привод останавливается. Если произойдет перерегулирование , то в момент прохождения счетчика 1 через О появится О на выходе шестого элемента 16 И-НЕ и триггер 3 переключается в единичное состояние по инверсному выходу. Открывается третий элемент 10 И-НЕ и импульсы обратной связи начинают поступать на суммирующий вход счетчика. Величина перерегулирования интегрируется счетчиком, привод реверсируется , на первом выходе блока
2снова появляется 1, открывается второй элемент 9 И-НЕ и содержимое счетчика 1 начинает уменьшаться до нуля.
При задании управляющего воздействия в виде унитарного кода величин скорости определяется частотой генертора 18.
При выборе направления вперед импульсы единичного уровня через ключ 19 поступают на третий вход триггера
3и через первый элемент 12 ИЛИ-НЕ на суммирующий вход счетчика 1.
Триггер 3 первым же импульсом нулевого уровня устанавливается в единичное состояние по прямому выходу. На выходе преобразователя 4 кода появляется выходное напряжение со знаком плюс, вал двигателя 7 и соответственно ось датчика 6 начинает вращаться в таком направлении, что на втором вьаходе блока 2 появляется 1 открывавается второй элемент 9 И-НЕ импульсы обратной связи с третьего
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Позиционный электропривод с инди-КАциЕй пЕРЕМЕщЕНия МЕХАНизМА | 1979 |
|
SU809051A1 |
| Реверсивный цифро-аналоговый интегратор-преобразователь | 1984 |
|
SU1247833A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Цифровой широтно-импульсный интегратор | 1978 |
|
SU763852A1 |
| Цифровой программный электропривод | 1980 |
|
SU959038A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
