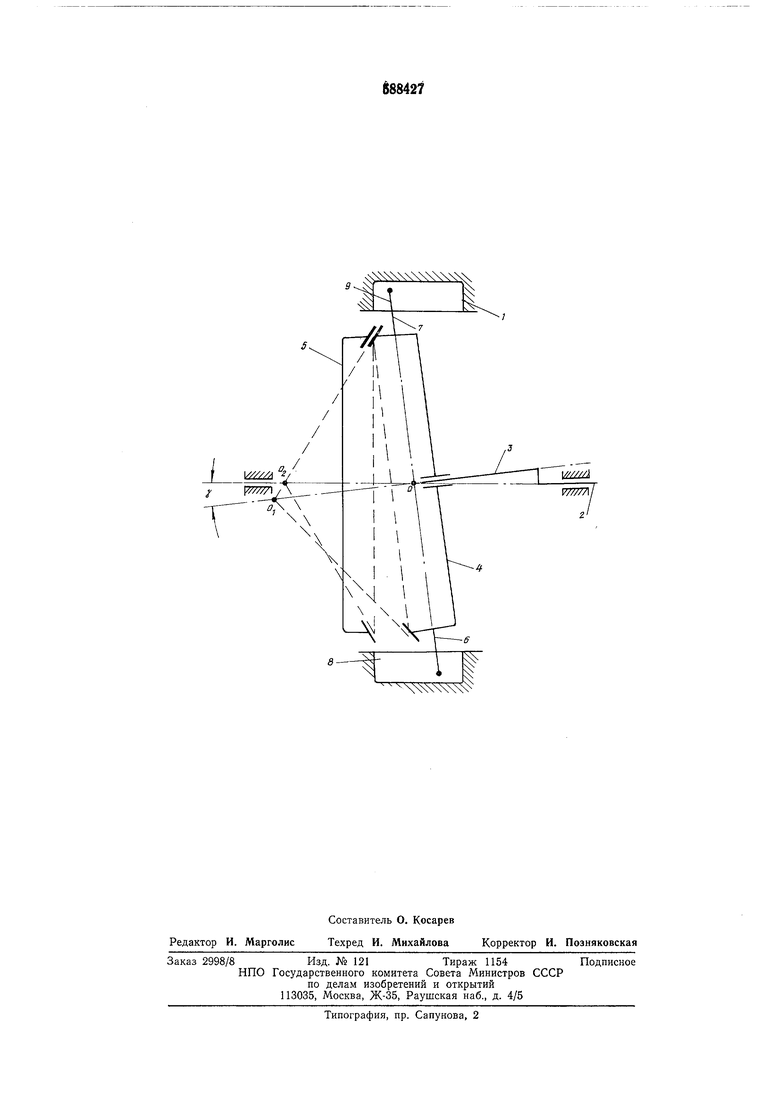
(54) ПРЕЦЕССИОННЫЙ РЕДУКТОР На 4epfe e изображена кинематическая схема прецессионного редуктора. Прецессионный редуктор содержит корпус 1, ведущий вал 2 с наклонным эксцентриком 3, сателлитное коническое зубчатое колесо 4, взаимодействующее с ним ведомое коническое зубчатое колесо 5. Сателлитное колесо 4 имеет наружные зубья, а ведомое колесо 5 - внутренние. На сателлитном колесе 4 закреплены два диаметрально противоположные пальца 6 и 7, скользящие в продольных пазах 8, 9 корпуса редуктора и предотвращающие вращение сателлитного колеса 4 вокруг собственной оси. На чертеже обозначены: угол между осями сателлитного и ведомого колес у, верщина начального конуса сателлитного колеса точка Oi, верщина начального конуса ведомого колеса точка Oz, пересечение осей ведомого и сателлитного колес и продолжения осей пальцев - точка о. Прецессионный редуктор работает следующим образом. При вращении ведущего вала 2 с угловой скоростью СЭ1 сателлитное колесо 4 совершает прецессионное сферическое движение вокруг неподвижной точки о, при этом свободные концы пальцев 6 и 7 скользят в пазах 8 и 9 корпуса 1 редуктора. Ось пальцев всегда остается перпендикулярной к оси сателлитного колеса 4 и проходит через точку о. Ведомое колесо 5, находящееся в постоянном зацеплении с сателлитным колесом 4, приводится последним в равномерное вращение с угловой скоростью, меньщей, чем MI, в соответствии с передаточным отношением редуктора. Изобретение позволяет повысить равномерность вращения ведомого колеса редуктора и улучщить его динамические характеристики вследствие того, что оси Двух пальщеб закрепленных на сателлитном колесе, прохо Дят через точку пересечения осей сателлитного и ведомого колес перпендикулярно к оси сателлитного колеса. Применение изобретения, например, в следящих системах, позволяет повысить точность работы аппаратуры. Формула изобретения Прецессионный редуктор, содержащий корпус, ведущий вал с наклонным эксцентриком, взаимодействующие между собой сателлитное, установленное на ведущем валу, и ведомое зубчатые конические колеса внутреннего зацепления со смещенными вершинами начальных конусов и закрепленный на сателлитном колесе палец, скользящий в продольном пазу корпуса и предотвращающий поворот сателлитного колеса вокруг собственной оси, отличающийся тем, что, с целью получения равномерного вращения ведомого колеса и улучщения динамических характеристик редуктора, сателлитное колесо выполнено с наружными зубьями, ось закрепленного на нем пальца расположена перпендикулярно к оси сателлитного колеса и проходит через точку пересечения осей ведомого и сателлитного колес, а редуктор снабжен вторым пальцем, закрепленным на сателлитном колесе диаметрально противоположно первому пальцу. Источники информации, принятые во внимание при экспертизе 1.Павлов Б. И. Механизмы приборов и систем управления. Л., «Машиностроение, 1972, с. 149, фиг. 80. 2.Патент США № 3258994, кл. 74-800, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕЦЕССИОННАЯ ПЕРЕДАЧА | 1990 |
|
RU2099614C1 |
| Захват манипулятора | 1988 |
|
SU1593950A1 |
| Захват промышленного робота | 1988 |
|
SU1583285A1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| Планетарный редуктор | 1981 |
|
SU1043389A1 |
| Сборочная головка | 1989 |
|
SU1713768A1 |
| Планетарный редуктор | 2015 |
|
RU2614430C1 |
| Прецессионный редуктор | 1988 |
|
SU1677416A1 |
| ЗУБЧАТЫЙ ВАРИАТОР | 1997 |
|
RU2136988C1 |
| Ведущий мост транспортного средства | 1985 |
|
SU1425104A1 |