Изобретение относится к промышленным роботам, а именно к захватам манипуляторов, и может быть использовано при работе в горячих цехах.
Цель изобретения - расширение технологических возможностей путем обеспечения схвата деталей различных габаритов.
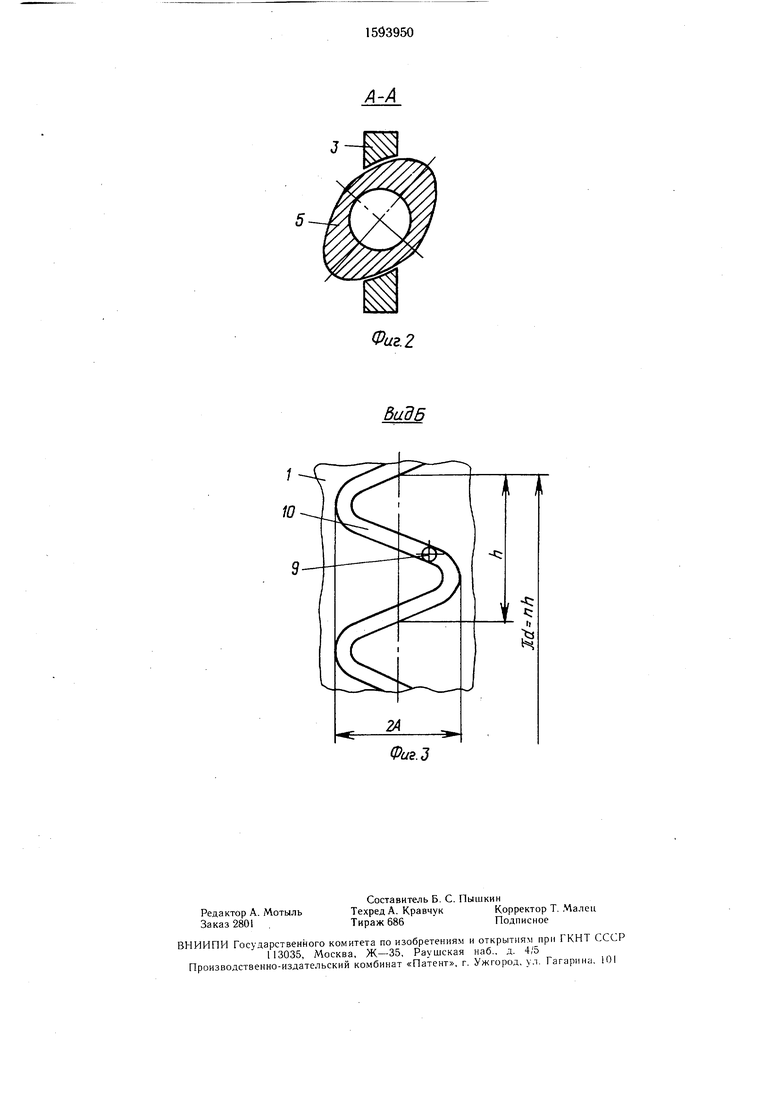
На фиг. 1 изображен захват манипулятора; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Число роликов 8 и зубьев колеса 14 находится в соотношении Zg Zi4-1. Тогда ii -Zi4, т. е. ведомый вал 5 враш,ается против вращения ведущего вала 12 (кривошипа И), против прецессионного движения сателлитного колеса 7.
Одновременно сферические пальцы 9, жестко связанные с сателлитным колесом 7, совершая прецессионное движение, образуют в пространстве синусоиду с амплитуЗахват манипулятора включает корпус 1, Ю дои 2А, равной двум амплитудам прецес- в котором закреплены на осях 2 губки 3, сионного движения сателлитного колеса, подпружиненные пружинами 4. Один конец Если в корпусе 1 выполнить синусную схватов охватывает по дуге ведомый вал 5 канавку 10 с п периодами синусоиды, прецессионного редуктора 6, который содер- то при одном прецессионном цикле (блажит сателлитное колесо 7 с зубьями, годаря контакту сферических пальцев 9 с ка- выполненными в виде конических роликов 8, навками 10) сателлитное колесо 7 пово- связанное с корпусом 1 посредством сфери-рачивается в направлении прецессионного
ческих пальцев 9, размещенных в синусных движения на угол, равный одному перио- канавках 10, выполненных на внутренней ду синусных канавок 10, т. е. . поверхности корпуса 1. Сателлитное колесо 7Так как вращательное движение сателустановлено на кривошипе 11 ведущего ва- 20 литного колеса 7 вокруг своей оси зала 12, с вязанного с валом электродвига- цепления сферических пальцев 9 с синус- теля 13, и зацепляется с ведомым зубчатым колесом 14, жестко связанным с ведомым валом 5, который в зоне взаимодействия с зубками имеет эллиптическую ного колеса 7, то . суммарное вращатель- (овальную) форму.ное движение ведомого колеса определяетЗахват манипулятора работает следую- щим образом.
При повороте манипулятора таким образом, что захват оказывается а нагревательной печи, охватывая деталь, металл зо губок «вспоминает свою форму, закладыными канавками 10 противоположно вращению ведомого колеса 14 от зацепления его зубьев с роликами 8 сателлится как разница этих скоростей, а общее передаточное отношение равно
i.iiXi2.
заемую в память, и осуществляет захват детали. Далее манипулятор поднимает деталь и переносит ее в закалочную ванну, опуская ее в закалочную холодную жиДСледовательно, ведомый вал 5 вращается с редукцией. Благодаря эллиптическому (овальному) выполнению участка вала 5, схватываемого губками 3, поворот вала 5 вокруг своей оси с передаточным отнокость . При 7ь;прямляются, 35 шением обеспечивает регулирование губок на освобождая деталь. Далее процесс повто- нужный размер захвата детали, ряется. Если в цеху имеется широкая, номенклатура деталей по размерам, то губкиФормула изобретения
необходимо регулировать на нужный размер детали. Для этого используется пре-Захват манипулятора, содержащий кор- цессионный редуктор 6, ведбмый вал 5 У Убки, вьшолненные из материала, которого связан с губками 3. Вал 5 полу- обладающего эффектом памяти формы, от- чает редуцированное вращательное движе- личающийся тем, что, с целью р асщире- ние таким образом, что вращательное технологических возможностей путем движение электродвигателя 13 посредством обеспечения схвата деталей различных кривошипа 11 преобразуется в прецессион- л габаритов, он снабжен механизмом регулиII./1t ГЛПИ ЗТ4иСГ ГТП ГТ(Л.1/АиЫа Ul ПП П UPH Н М М R
ное движение сателлитного колеса 7 вокруг центра прецессии О. В результате зацепления роликов 8 с зубьями колеса 14 последнее вращается с редукцией
гZu
ZM-Ze
где Zg и Zi
рования положения губок, выполненным в виде прецессионного редуктора, часть ведомого вала которого имеет эллиптическую форму и контактирует с губками, а сателлитное колесо снабжено пальцами, закреп- j-Q ленными на нем в плоскости, проходящей через полюс зацепления колес, при это.м
число роликов и зубьев сател- на внутренней поверхности корпуса выполнены синусные канавки для размещения пальцев сателлитного колеса.
литного 7 и зубчатого 14 колес соответственно.
литного колеса 7 вокруг своей оси зацепления сферических пальцев 9 с синус- ного колеса 7, то . суммарное вращатель- ное движение ведомого колеса определяетными канавками 10 противоположно вращению ведомого колеса 14 от зацепления его зубьев с роликами 8 сателлитлитного колеса 7 вокруг своей оси зацепления сферических пальцев 9 с синус- ного колеса 7, то . суммарное вращатель- ное движение ведомого колеса определяется как разница этих скоростей, а общее передаточное отношение равно
i.iiXi2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1987 |
|
SU1511115A1 |
| Захват промышленного робота | 1988 |
|
SU1583285A1 |
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Манипулятор | 1987 |
|
SU1511120A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Привод электромобиля | 1989 |
|
SU1724486A1 |
| Прецессионный редуктор | 1972 |
|
SU588427A1 |
| ПРЕЦЕССИОННАЯ ПЕРЕДАЧА | 1990 |
|
RU2099614C1 |
Изобретение относится к промышленным роботам, а именно к захватам манипуляторов, и может быть использовано при работе в горячих цехах. Цель изобретения - расширение технологических возможностей путем обеспечения схвата деталей различных габаритов. Захват манипулятора включает корпус 1, в котором закреплены на осях 2 губки 3, подпружиненные пружинами 4. Один конец губок охватывает ведомых вал 5 прецессионного редуктора 6, который содержит сателлитное колесо 7 с зубьями, выполненными в виде конических роликов 8, связанное с корпусом 1 посредством сферических пальцев 9, размещенных в синусных канавках 10, выполненных на внутренней поверхности корпуса 1. Сателлитное колесо 7 установлено на кривошипе 11 ведущего вала 12, связанного с валом электродвигателя 13, и зацепляется с ведомым зубчатым колесом 14, жестко связанным с ведомым валом 5, который в зоне взаимодействия с губками имеет эллиптическую (овальную) форму. При повороте манипулятора, при котором захват оказывается в нагревательной печи, охватывая деталь, металл губок 3 вспоминает свою форму, закладываемую в память, и осуществляет захват детали. При переносе детали в закалочную ванну с холодной жидкостью губки выпрямляются, освобождая деталь. Далее процесс повторяется. При широкой номенклатуре деталей по размерам губки необходимо регулировать. Для этого используется прецессионный редуктор, ведомый вал 5 которого связан с губками 3. Вал 5 получает редуцированное вращательное движение от электродвигателя 13 посредством кривошипа, при котором вращательное движение преобразуется в прецессионное движение сателлитного колеса 7 вокруг центра прецессии О. Благодаря эллиптическому (овальному) выполнению участка вала 5, схватываемого губками 3, поворот вала 5 вокруг своей оси с передаточным отношением I O обеспечивает регулирование губок на нужный размер захвата детали. 3 ил.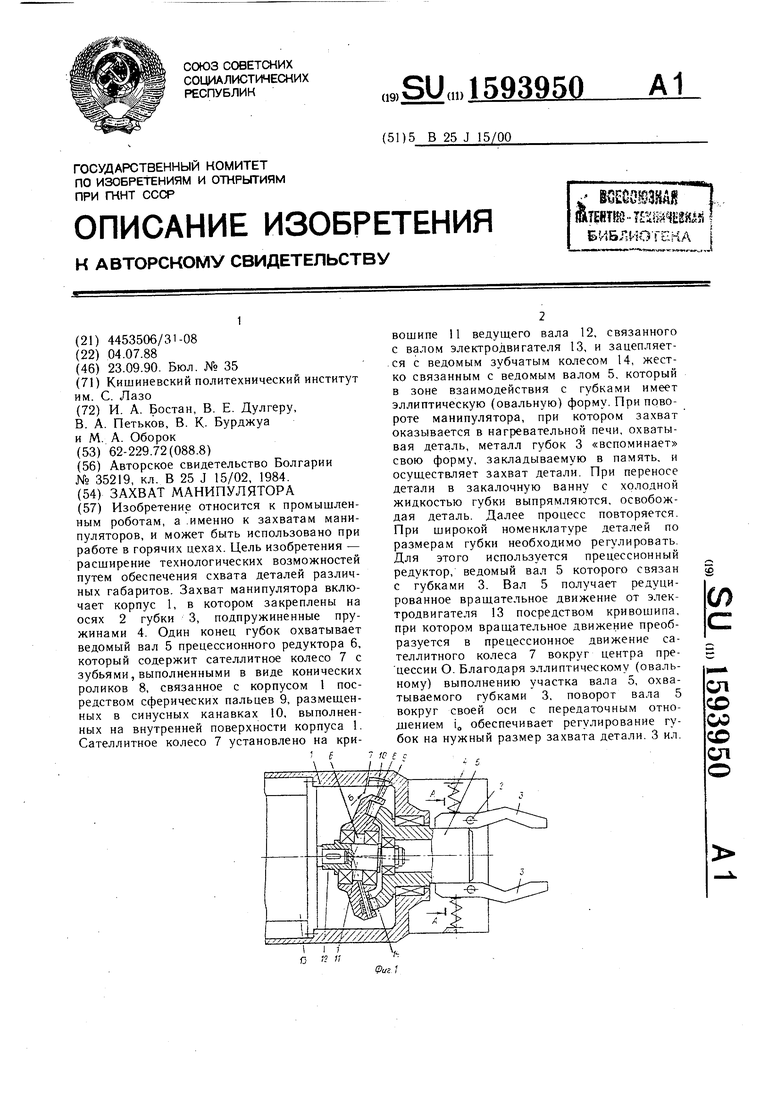
Фиг. 2
Видб
«a/aJ
| Приспособление к трамвайным вагонам для предохранения от попадания под колеса вагонов встречных предметов | 1933 |
|
SU35219A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
