Изобретение относится к устройства.м имитации условий движения ,в тренажерах водителей транспортных средств.
Известны устройства имитации условий движения траи-спортнего средства, содержащие кабину, установленную с возможностью качания в двух взаи-мно перпендикулярных направлениях, подвижный макет местности, над которым расположена оптическая головка с входным зрачком, связанная с прибором наблюдения, имеющая приводы имитации колебаний и датчик рельефа местности, соедннелиый через вычислительное устройство с приводами качания оптической головки и кабины.
Устройство имеет два различных привода качания, что снижает качество имитирования движения транспортного средства.
Цель изобретения-повышение качества и-митации условий движения путем снихронизации перемещений макета местности в приборе наблюдения с колебаниями кабины.
Поста1вленная цель достигается тем, что оптическая головка жестко связана с кабиной, оси вращения последней лежат в одной плоскости, входной зрачок расположен в центре качания кабины, а макет местности установлен подвижно относительно оптической головки.
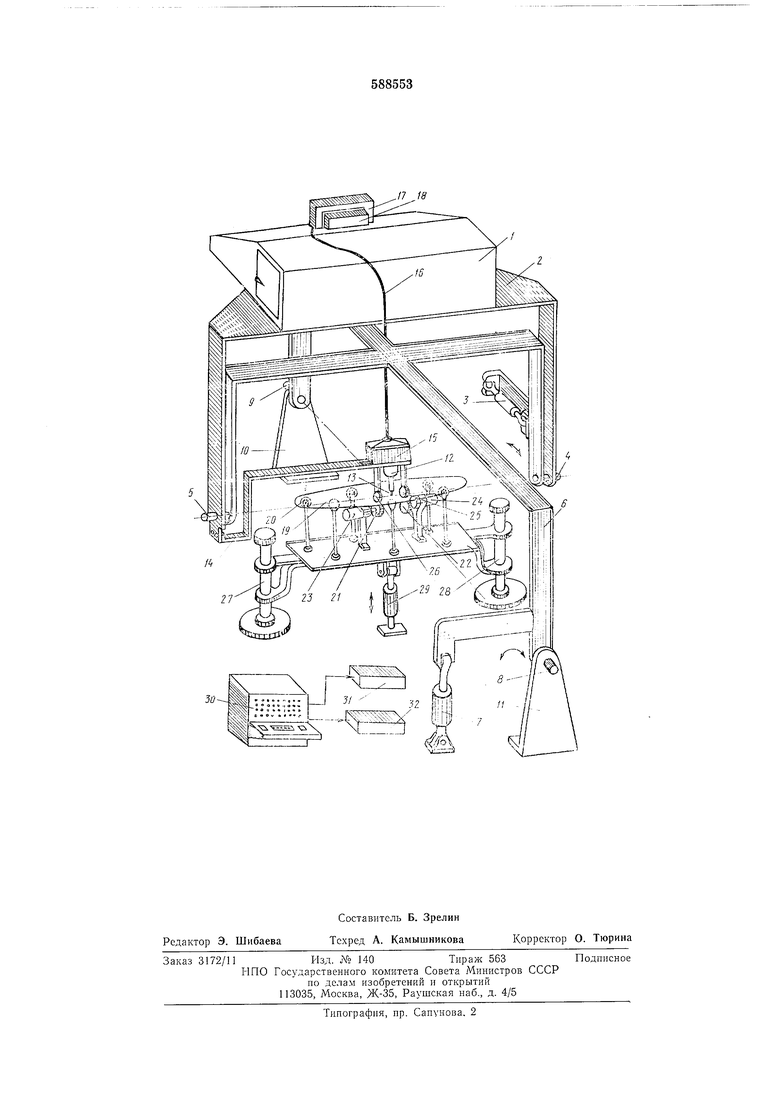
На чертеже изображено предлагаемое устройство, общий вид.
Устройство содержит кабину 1 с органами управления, установленную на наружной раме 2, вращающуюся с помощью привода 3 вокруг цапф 4 и 5, механически связанных с внутренней рамой 6 и имеющих общую геометрическую ось. Рама 6, в свою очередь, вращается с помощью привода 7 вокруг
цапф 8 и 9, устанавливаемых на опорные стойки 10 и ill. Оптическая головка 12 с входным зрачком с помощью кронштейна 14 жестко связана с наружной рамой 2. Входной зрачок 13 расположен в центре вращения, находящемся в точке пересечения взаимно перпендикулярных осей цапф 4, 5 и 8, 9, лежащих в одной плоскости.
Оптическая головка 1.2 с передающей телейизионной камерой 15 связана электрически
коаксиальным кабелем 16 с телевизионным приемником 17, установленным перед прибором наблюдения 18 на кабине 1. Под входным зрачком 13 расположен макет местности 19, Зстановленный на самоцентрирующихся
опорных роликах 20. Перемещение макета 19 осуществляется с помощью приводных роликов 21, и 22, вращаемых исполнительными приводами 23 и 24. Датчики 25, 26 обеспечивают съем текущей информации о рельефе
макета местности 19. Вертикальное перемещелие макета местности осуществляется по направляющим 27, 28 С помощью привода 29. Сигналы с вычислительного устройства 30 усиливаются по мощности с помощью усилителя 31, электрически связанного с приводами перемещения макета местпости 23, 24 и 29, а та.кже с помощью усилителя 32, электрически связанного с приводами перемещения кабины 3 и 7.
Устройство работает следующим образом.
Оператор из кабины наблюдает за изображением текущих дорожных условий на экране телевизионного приемника 17 и, воздействуя па органы управления, выбирает необходимую «скорость движения. Соответствующие электрические сигналы от органов управления и датчиков рельефа местности 25, 26 по1ступают на вход вычислительного устройства ЗО, € помощью .которого определяются текущие значения параметров колебания кабины 1, а также сигналы управления перемещением макета местности 19 в соответствии с имитируемой «скоростью движения.
Перемещение в плоскости макета 19 осуществляется при помощи ведущих роликов 21, 22, а его вертикальное перемещение производится с -помощью привода 29 по направляющим 27, 28 для отработки макронеровностсй макета местности 19. Сигналы с вычислительного устройства 30 усиливаются по мощности с помощью усилителя 31, электрически связа нного с приводами 23, 24 и 29 перемещения макета местности 19, а также с помощью усилителя 32, электрически связаннОГо с приводами 3 и 7 перемеще1иия .кабипы 1.
Изображение местности с макета 19 считывается с помощью входного зрачка 13 оптической головки 12 и передающей телевизионной камеры 15. Видиосигналы изображепия передаются посредством коаксиального кабеля 16 на телевизионный приемник 17, j cTaиовлениьш перед ириборо-м наблюдения 1:8 на кабине 1. Колебания кабины 1 передаются жестко связанному с ней входному зрачку 13,
что обеспечивает имитацию колебаний изображения местности, характерных Б условиях колеблющейся кабины.
При необходимости из.менения условий движения на тренажере производится смена
макета местности, что расширяет возможности процесса обучения «а тренажере.
Предложенное устройство имитации условий движения транспортного средства на тренажере позволяет -создать конструкцию тренажера более компактной и простой по сравнению с известными устройствами.
Формула изобретения
Устройство имитации условий движения
транспортного средства на тренажере, содержащее кабину, установленную с возможностью качания в двух, взаимно перпепдикулярных направлениях, подвижный макет местности, над которым ра-сположена оптичеекая головка с входпым зрачком, связанная с прибором наблюдения, например, с помощью телевизионной системы, отличающееся тем, что, с целью повышения качества имитации условий движения путем синхрониза-ции перемещений макета местности в приборе наблюдения с колебаниями кабины, оптическая головка жестко связана с кабипой, оси вращения последней лежат в одной плоскости, входной зрачок расположен в
центре качания ка-бины, а макет местности установлен подвижно отнооительпо. оптической головки.
Ист оч.н ик и инф ор м а ци и, принятые во внимание при экспертизе
1. International Defense Review, March 1970, V. 3, N. 1, p. 80.
/7 W
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство имитации визуальной обстановки тренажера оператора транспортного средства | 1981 |
|
SU1010641A1 |
| Имитатор визуальной обстановки на тренажере операторов транспортных средств | 1976 |
|
SU613362A1 |
| Устройство имитации визуальной обстановки на тренажере оператора транспортного средства | 1976 |
|
SU588554A1 |
| Тренажер водителя транспортного средства | 1980 |
|
SU938298A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1401503A1 |
| ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2230370C2 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Имитатор внешней визуальной обстановки тренажера транспортного средства | 1987 |
|
SU1504659A1 |
| Устройство для имитации условий движения транспортного средства на тренажере | 1982 |
|
SU1257693A1 |