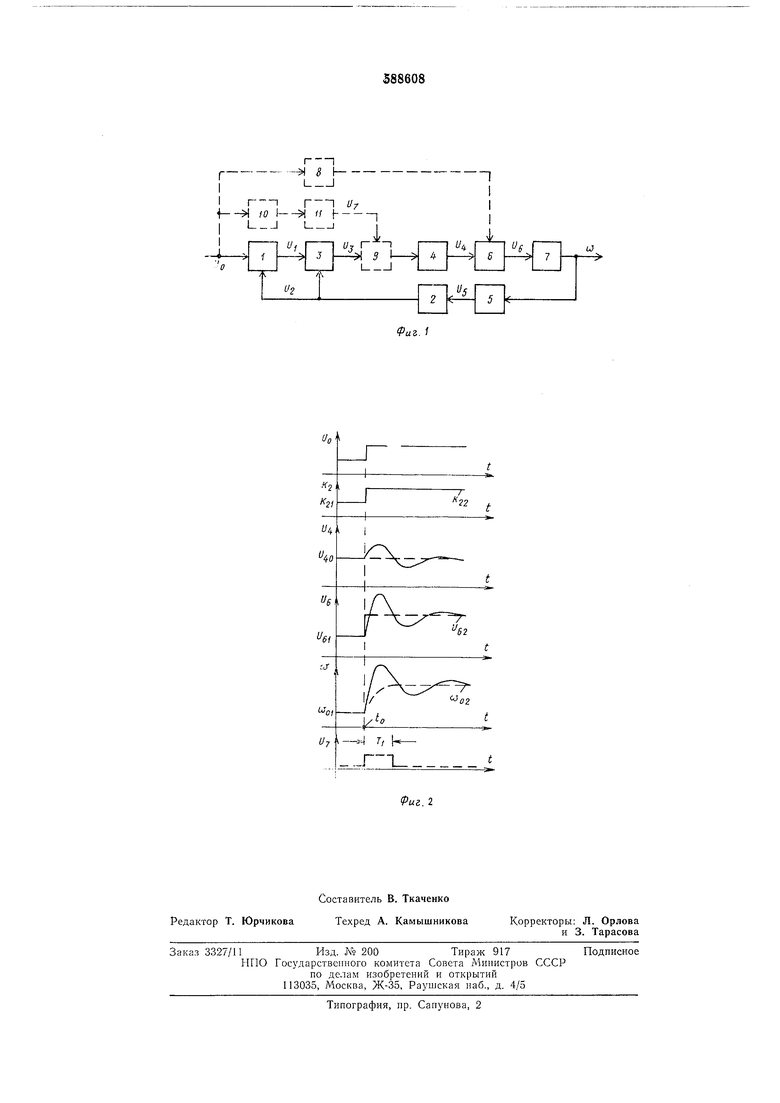
пряжение двигателя 7, со - скорость вращения вала двигателя. Благодаря введению устройства коррекции 8 коэффициента усиления усилителя 6, включенного между аналоговым входом время-имлульсного преобразователя 1 и дополнительным входом усилителя 6, система приобретает дополнительные возможности улучшения качества регулирования. По окончании переходно1-о процесса выполняется условие «„ /СЛ,,„,(1) где Ki - коэффициент передачи двигателя 7, Кг - коэффициент усиления усилителя 6, f/40 - устаиовившееся напряжение блока интегрироваиия 4. Если требуется обеспечить пропорциональность между соо и UQ, т. е. К.С/о, где Кз - коэффициент пропорциональности, при пропорциональной зависимости величины Кг от Uo, т. е. К, К,и„(3) ТО с помощью формул (1-3) можно найти такое значение коэф|фициента передачи К4 устройства коррекции 8 которое обеспечивает в установившемся режиме вращение вала двигателя 7 с любой из требуемого диапазона скоростью шо за счет изменения коэффициеита 2 усиления усилителя 6 при неизменном значении t/. Между тем в переходном процессе, вызванном изменением в момент времени /о задания UQ, папряжение Ui сиачала уходит от старого установившегося значения Un,, а затем снова к нему (как к новому установившемуся значению) возвращается. Временные диаграммы соответствующего режима изображены на фиг. 2 сплошными линиями. Колебания напряжения Ui, вызывают колебания напряжения UE на выходе усилителя 6, коэффициент усиления Кг которого в момент времени to меняет свое значение с меньшего на больший. Колебания напряжения U вызывают колебания скорости со, обеспечивая неудовлетворительные показатели качества регулирования. Для повышения быстродействия системы и обеспечеиия плавного (без перерегулирования) изменения скорости со в переходном режиме целесообразно на время Ti протекания переходного процесса в двигателе 7 разомкнуть контур управления, не давая возможности изменяться напряжению U на выходе интегратора 4. Это достигается введением дополнительной функциональной связн, содержащей узлы 9, 10 и 11. Временные диаграммы скорректироваиной подобным образом системы пзображены на фиг. 2 штриховыми линиями. Если в момент временн /о скачком изменяется задание на регулирование Vo, то скачком изменяется коэффициент усиления Кг усилителя 6 и его выходное напряжение Ue (от уровня Кг1 и соответствующего ему Vei до уровня Кгг и соответствующего ему )Двигатель 7 начинает разгоняться от скорости со „J до скорости со„г В первом ириближении по экспоненте. Однако измепеиия скорости со не вызывают измеиения напряжения и блока интегрнрования 4, так как блок дифференцирования 10 в момент времени /о включает задатчик времени 11, который на время TI с помощью ключа 9 размыкает контур системы. Спустя время Ti задатчик временн замыкает ключ 9 и замкнутый контзр управления доводит скорость со до значения со« , если по каким-то причинам условие (4) строго не выполняется. Изменяя время Ti, можно получать желаемые переходные нроцессы (i(i). Формула изобретения 1.Система для стабилизации скорости вращения вала двигателя по авт. св. № 412595, отличающаяся тем, что, с целью стабилизации ноказателей качества процесса унравления в широком диапазопе изменения заданных значений скорости, в нее введено устройство коррекции коэффициента усилеиия усилителя, пропорционального аналоговому задающему сигналу, причем его вход соединен с аналоговым входом время-имиульсного преобразователя, а выход подключен к дополнительному входу усилителя. 2.Система по л. 1, отличающаяся тем, что, с целью повышения быстродействия, в нее дополнительно введена корректирующая связь, содержащая блок дифференцирования, задатчик времени и ключ, причем ключ, включенный между сравнивающим устройством и блоком интегрирования, унравляющим входом подключен к выходу задатчика времени, вход которого через блок дифференцирования связан с аналоговым входом время-импульсного преобразователя.
I1
0 I- ,,
гП
1I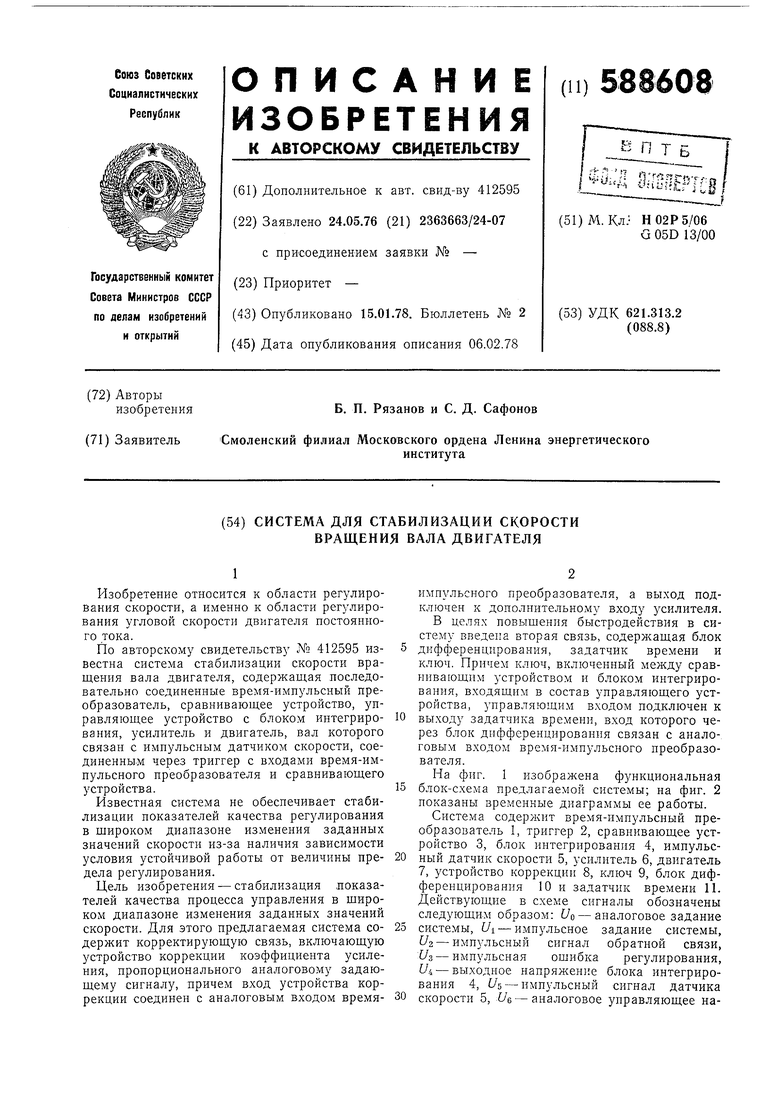
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Электрометрический преобразователь малых токов и зарядов | 1988 |
|
SU1656470A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Регулятор | 1978 |
|
SU798700A1 |
| Система регулирования турбины | 1980 |
|
SU918452A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Устройство для программного регулирования температуры инерционных объектов в установках газодинамического нагрева | 1984 |
|
SU1182495A1 |
| Цифровой электропривод | 1990 |
|
SU1725358A1 |