1
Изобретение относится к приборостроению и техническим средствам автоматического управления и может найти широкое применение при управлении инерционными объектами, например землеройными машинами.
Целью изобретения является повышение динамической точности и быстродействия системы. ,
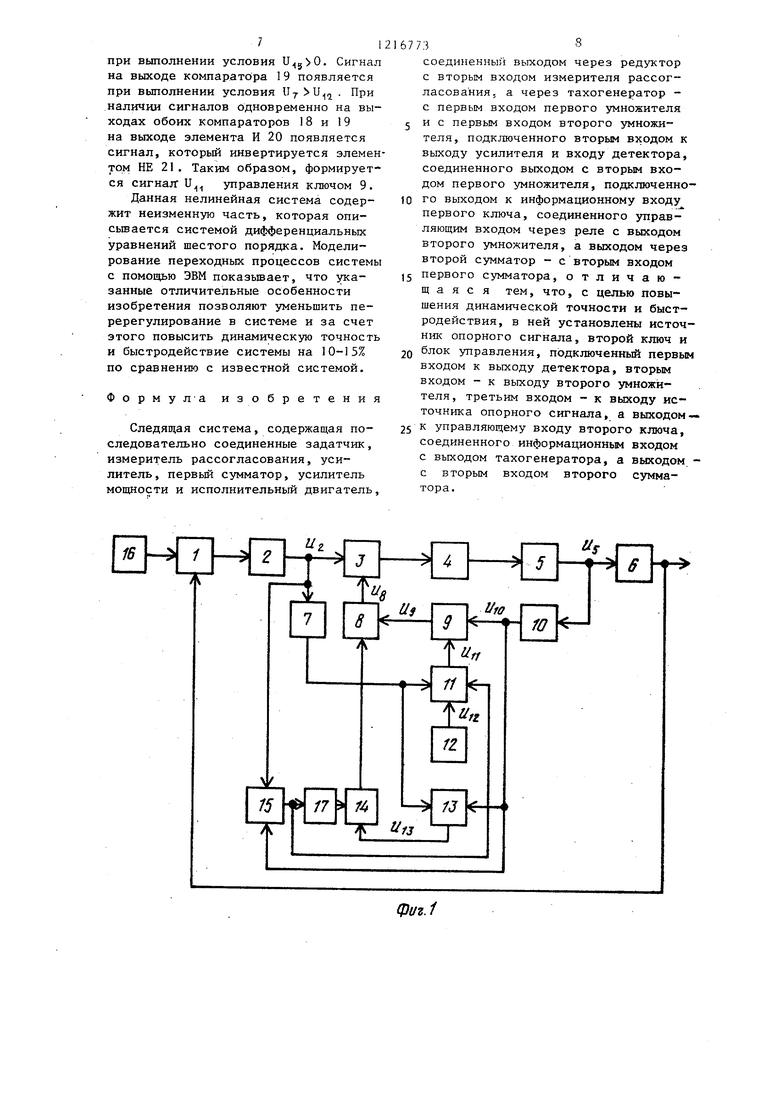
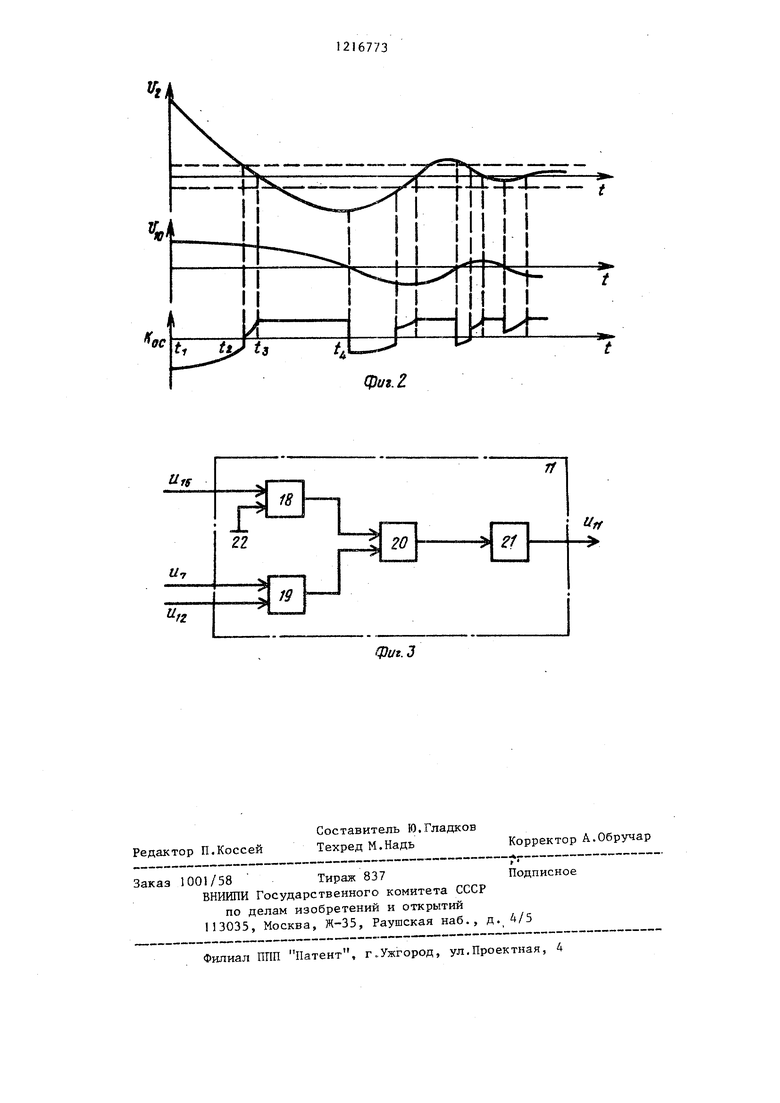
На фиг.1 представлена функциональная схема системы; на фиг.2 - диаграммы сигналов, поясняющие принцип работы системы; на фиг. 3 - принципиальная схема блока управления .
Система содержит измеритель 1 рассогласования, усилитель 2, первый сумматор 3, усилитель 4 мощности, исполнительный двигатель 5, редуктор 6, детектор 7, второй сумматор 8, второй ключ 9, тахогене- ратор 10, блок 11 управления, источник 12 опорного сигнала, первьй умножитель 13, первьй ключ 14, второй умножитель 15, задатчик 6, реле 17, первый 18 и второй 19 компараторы, элемент И 20, элемент НЕ 21, общую шину 22.
U; - выходной сигнал i-ro функционального блока или элемента; K(j(. - коэффициент местно обратной
связи системы. I
В состав блока 11 управления входят два компаратора 18 и 19, элемент И 20, элемент НЕ 21 и общая шина 22.
В качестве детектора 7 может быт применен линейный детектор, имеющий характеристику типа Выделение модуля.
Система работает следующим образом.
Выходной сигнал Uf задатчика 16 подается на первьй вход измерителя I рассогласования, на второй вход которого поступает выходной сигнал Ug редуктора 6, а на его выходе формируется сигнал рассогласования - и,(, - Ug. Этот сигнал U подается на вход усилителя 2, на выходе которого формируется сигнал U К- Ui, где К коэффициент передачи усилителя 2.
Сигнал V поступает на первый . вход первого сумматора 3, на второй вход которого поступает выходной сигнал Uj второго сумматора 8, а на его выходе формируется сигнал Пз
2167732
Сигнал Uj поступает на вход усилителя 4 мощности, на выходе которого формируется сигнал U;, К/, 11, где К,, коэффициент передачи усилителя
5 4 мощности. Сигнал U поступает на вход исполнительного двигателя 5, на выходе которого формируется сигнал Uj Ks Ui,, где Kg- - коэффициент передачи исполнительного двигателя
10 5. Сигнал Ue поступает на вход редуктора 6, на выходе которого формируется сигнал и , где Kg - коэффициент передачи редуктора 6, который поступает на второй вход из15 мерителя 1 рассогласования. Кроме того, сигнал Ug поступает на вход тахЬгенератора 10, на выходе которого формируется сигнал U,(, U , где - коэффициент передачи тахо20 генератора 10.
Сигнал , с выхода тахогенерато- ра 10 поступает на первый вход первого умножителя 13, на второй вход которого поступает выходной сигнал U.
25 детей гора 7, а на его выходе формируется сигнал U-, Uio-lUjj(.
Кроме того, сигнал U поступает на первый вход второго умножителя 30 15, на второй вход которого поступает выходной сигнал U усилителя 2, а на его выходе формируется сигнал Uj . Сигнал и,5 поступает на вход реле 17, на выходе которого ,- формируется сигнал U-,-f вида
и
1 , если 0,
17
(,0, если Ui5 0.
40 Сигнал . поступает на управляющий вход первого ключа 14, на информационный вход которого поступает сигнал с выхода первого умножителя 13, а на его выходе форми45 руется сигнал вида
, если Ui7
О, если и,7 - О
50 Выходной сигнал U|jвторого умножителя 15 поступает на второй вход блока 11 управления и далее на сигнальный вход первого компаратора 18, входящего в блок 11 управления, Опоо55 ный вход первого компаратора 18 подключен к общей шине 22. На выходе первого KOMnapiaTopa 18 формируется сигнал Ui8 вида
и
1518
LO, если . Выходной сигнал U-f детектора 7 поступает на первый вход блока 11 управления и далее на сигнальный вход второго компаратора 19, входящего в блок 11 управления. Выходной сигнал Uf-j источника 12 опорного сигнала поступает на третий вход блока 11 управления и далее на опорный вход второго компаратора 19, на выходе которого формируется сигнал вида
и
19
р, если и и 0, если Uy и,,.
Выходные сигналы U,g и компараторов 18 и 19 поступают на входы элемента И 20, на выходе которого формируется сигнал- вида
70
1 , если Цд и U,g 1,
.0, во всех остальных случаях.
Выходной сигнал элемента И 20 поступает на вход элемента НЕ 21, на выходе которого формируется си:- нал вида
и
1 , если UjQ О,
11
Ю, если Ujo 1 Выходной сигнал Uj элемента НЕ 21 является выходным сигналом блока 11 управления, т.е.
Сигнал U:,,, с выхода блока 1 1 управления поступает на управляющий вход первого ключа 9, на информационный вход которого поступает сигнал с выхода тахогенератора 10, а на его выходе формируется сигнал Ug вида
, если ,
Ug Ч
lO, если и, 0.
Выходной сигнал Ug второго ключа 9 поступает на второй вход второго сумматора 8, на первый вход которого поступает выходной сигнал первого ключа, а на выходе второго сумматора 8 формируется сигнал U Ug - U , который поступает на второй вход первого,сумматора 3. В дальнейшем система работает аналогично.
6773
Принцип коррекции данной системы заключается в следующем. Сигнал , подаваемьй на вход измерителя 1 рассогласования, отслеживается исполни5 тельным двигателем 5, причем его быстродействие зависит от корректирующего сигнала обратной связи по скорости поворота выходного вала, суммированного в определенные моменты вре10 мани с форсирующим сигналом, пропорциональным произведению сигналов, пропорциональных модулю сигнала рассогласования и скорости поворота выходного вала, и с сигналом рассогла15 сования. Пр1гчем корректирующий сигнал отрицательной обратной связи формируют с момента, когда модуль сигнала рассогласования равен допустимой величине динамической ошибки сле20 дящей системы, определяемой из ее требуемых точностных характеристик в установившемся режиме работы, при положительном произведении сигналов, пропорциональных сигналу рассогла25 сования и скорости поворота выходного вала системы, до момента, когда скорость меняет знак с отрицательного на положительный. Таким образом, демпфирование колебаний в сле3Q дящей системе начинается при входе в область допустимых отклонений угла поворота выходного вала системы и продолжается в четной четверти колебаний, при этом улучшается торможение при непосредственном приближении к положению равновесия и во время удаления системы от состояния равновесия. В остальное время периода колебаний в системе отсутствует демпфирование с помощью корректирующего сигнала, что способствует более интенсивному разгону системы при ее движении к положению равновесия, за счет чего уменьшается колебатель, ность и перерегулирование, повышается 45
быстродействие системы.
Сигнал управления формируется на сумматоре 3, для чего на его первый вход подается сигнал Uj. К (U(6 - 5 -KgU 5) .На его второй вход через второй сумматор 8 в цепи формирования корректирующего сигнала поступает сигнал, состоящий из двух составляющих: первой, пропорциональной ско- S рости поворота выходного вала, подаваемой через ВТОРОЙ ключ 9, второй пропорциональный произведению , формируемому первым умножителем 13
35
40
в канале формирования величины нелинейного сигнала коррекции, подаваемой через-первый ключ 14э причем и 8 Ug - Uii, . Условия формирования сигналов V и Ug- следующие при выполнении условий О и ,- () сигнал Ug 0, в противном случае Ug 5 при вьшолнении условия U U, (2) сигнал Ui3 в протшшом случае сигнал и.,, 0„
Анализ условий (1) производится блоком 11 управления, на входы которого поступают сигналы U-j, UTJ и U;,s Блок 1 1 управления при вьшолнении условий (1) закрьшаёт ключ 9, Второе логическое условие формируется с помощью реле 17, на вход которого поступает сигнал 5 U Ключ 14 замкнут при выполнении условия (2), Ка фиг.2 изображены графики изменения сигнала рассогласования U-) 5 снимаемого с измерителя рассогласования 1; демпфирующего сигнала 5 пропорционального скорости поворота выходного вала сиетемыj коэффициента местной обратной связи системы KOJ, , а также отмечены четыре характерных момента времени t, - t,. В первоначальный момент времени t отработки сигнала задани Ufg второй умножитель 15 в канале формирования логического сигнала коррекции вырабатьшает положительный сигнал, т.е. U 5 - ч -2. При этом блок 11 управления выраба- тьшает сигнал U О, в результате чего второй ключ 9 находится в разокнутом состоянии и сигнал , про- порциональньш скорости поворота выходного вала системы, не проходит на второй вход второго сумматора 8 в цепи формирования корректирующего сигнала5 т.е. Ug О, Кроме того, срабатьшает реле 17, в результате чего замыкается первый ключ 14 и на первьй вход сумматора 8 поступает сигнал U,. Таким образом, при t t t Ug 13 S момент времени t j велггчнна модуля сигнала рассогласования становится меньше допустимой, т.е. . В результате этого на выходе блока 1 управления появляется сигнал U I, под воздействием которого второй ключ 9 открывается и демпфирующий сигнал UIP обратной связи с выхода
тахогенератора 10 поступает на второй вход второго сумматора 8, т,е, Ug U-io . Таким образом 5 при 5 t t tj Ug Ug - .
В следующей четверти колебаний, т.е. при выполнении условий, О реле 14 отпускает, первый ключ 17 размыкается и снимает сигнал
o с первого входа второго сумматора 8,
в результате этого при tj t tj
Ug Ug . При изменении знака про изведения сигналов, пропорциональных
сигналу рассогласования и скорос5 ти поворота выходного вала системы с отрицательного на положительный, т.е. при О, реле 14 вновь сработает, замыкается первый ключ 17 и подает сигнал на первый вход
0 второго сумматора 8, а блок 11 управления изменяет сигнал на своем выходе на 0 и тем самым закрывает второй ключ 9, который снимает демпфирующий сигнал U-,(j со вто5 рого входа второго, сумматора 8, т.е. вновь станет Ug Глубину обратных.связей выбирают из условия обеспечения устойчивости системы в этом режиме. В дальнейшем цикл
0 формирования сигнала коррекции Ug будет повторяться. Таким образом, сигнал из на выходе первого сумматора 8 в цепи формирования сигнала управления равен
U3-Uz-U8 Ui-U9+H Ui3 Uz- H ,U,o + + И-г-Що Ut -(%-%U7) - и,о и,, - K.ocUio ,
где 1 - 7;
Г1 , при О или U-, и,, ,,
LO, при О или U-f ,
н;
Ч 1
р, при О, 1о, при О
График изменения К показан на фиг.2. Из графика видно, что на участке разгона ti|-tr, местная обратная связь является положительной, на участке торможения местная обратная связв является отрицательной. Фзшкционально блок 11 управления может состоять из двух компараторов 18 и 19, элементов И 20, НЕ 21 и общей шины 22 (фиг.З). Сигнал на выходе компаратора 18 появляется
71
при выполнении условия . Сигнал на выходе компаратора 19 появляется при выполнении условия U/ При наличии сигналов одновременно на выходах обоих компараторов 18 и 19 на выходе элемента И 20 появляется сигнал, который инвертируется элементом НЕ 21. Таким образом, формируется CHrHajr и управления ключом 9. Данная нелинейная система содержит неизменную часть, которая опи- сьшается системой дифференциальных уравнений шестого порядка. Моделирование переходных процессов системы с помощью ЭВМ показывает, что указанные отличительные особенности изобретения позволяют уменьшить перерегулирование в системе и за счет этого повысить динамическую точность и быстродействие системы на 10-15% по сравнению с известной системой.
Форму л а изобретения
Следящая система, содержащая последовательно соединенные задатчик, измеритель рассогласования, усилитель, первый сумматор, усилитель мощности и исполнительный двигатель,
3
соединенный выходом через редуктор с вторым входом измерителя рассогласования, а через тахогенератор - с первым входом первого умножителя
и с первым входом второго умножителя, подключенного вторым входом к выходу усилителя и входу детектора, соединенного выходом с вторым входом первого умножителя, подключенного выходом к информационному входу первого ключа, соединенного управляющим входом через реле с выходом второго умножителя, а выходом через второй сумматор - с вторым входом
первого сумматора, отличающаяся тем, что, с целью повышения динамической точности и быстродействия, в ней установлены источник опорного сигнала, второй ключ и
блок управления, подключенньй первым входом к выходу детектора, вторым входом - к выходу второго умножителя , третьим входом - к выходу источника опорного сигнала, а выходом -
к управляющему входу второго ключа, соединенного информационньм входом с выходом тахогенератора, а выходом - с вторым входом второго сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1985 |
|
SU1290251A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Следящая система | 1987 |
|
SU1499315A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Двухканальная система управления | 1985 |
|
SU1269093A1 |
| Калибратор коэффициента интермодуляционных искажений | 1988 |
|
SU1613972A1 |
| Устройство для регистрации индикаторных диаграмм поршневых машин | 1988 |
|
SU1597634A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
Изобретение относится к приборостроению и техническим средствам автоматического управления и может найти широкое применение при управлении инерционными объектами, например, землеройными машинами, В системе решается задача компенсации инерционности объекта регулирования, переключения скоростной обратной связи на основании информации о знаке изведения сигнала рассогласования и скоростной обратной связи и об уровнях этих сигналов, Эта задача решается следующим образом. Сигнал задания сравнивается с регулируемой координатой в измерителе рассогласования, на выходе которого формируется сигнал рассогласования. Он усиливается в предварительном усилителе и поступает на первый вход перйого сумматора. где суммируется с выходным сигналом второго сумматора. Выходной сигнал первого сумматора усиливается в усилителе мош 1ости и воздействует на исполнительный двигатель, который 4et5e3 редуктор воздействует на объект регулирования, меняя регулируемую координату. Скорость вращения вала двигателя измеряется тахогенерато ром. Выходной сигнал последнего поступает на первый вход первого умножителя, в котором умножается на модуль выходного сигнала усилителя, и на первый вход второго умножителя, в котором умножается на выходной сигнал . усилителя. Выходной сигнал второго умножителя через релейный элемент поступает на управляющий вход первого ключа, который управляет подключением выходного сигнала к первом у входу второго сумматора. Модуль выходного сигнала усилителя и выходные сигналы второго умножителя и ис- точннка постоянного сигйала поступают на входы блока управления, который с помощью второго ключа управляет подключением выходного сигнала тахогенератора к второму входу второго сумматора, В блоке управления . определяется знак выходного сигнала второго умножителя с помощью первого компаратора. И, кроме того, в нем сравниваются величины выходных сигналов усилителя и источника постоянного сигнала с помощью второго компаратора. Выходные сигналы компараторов через элементы И и НЕ поступают на вход блока управления, 3 ил. iNd о: оо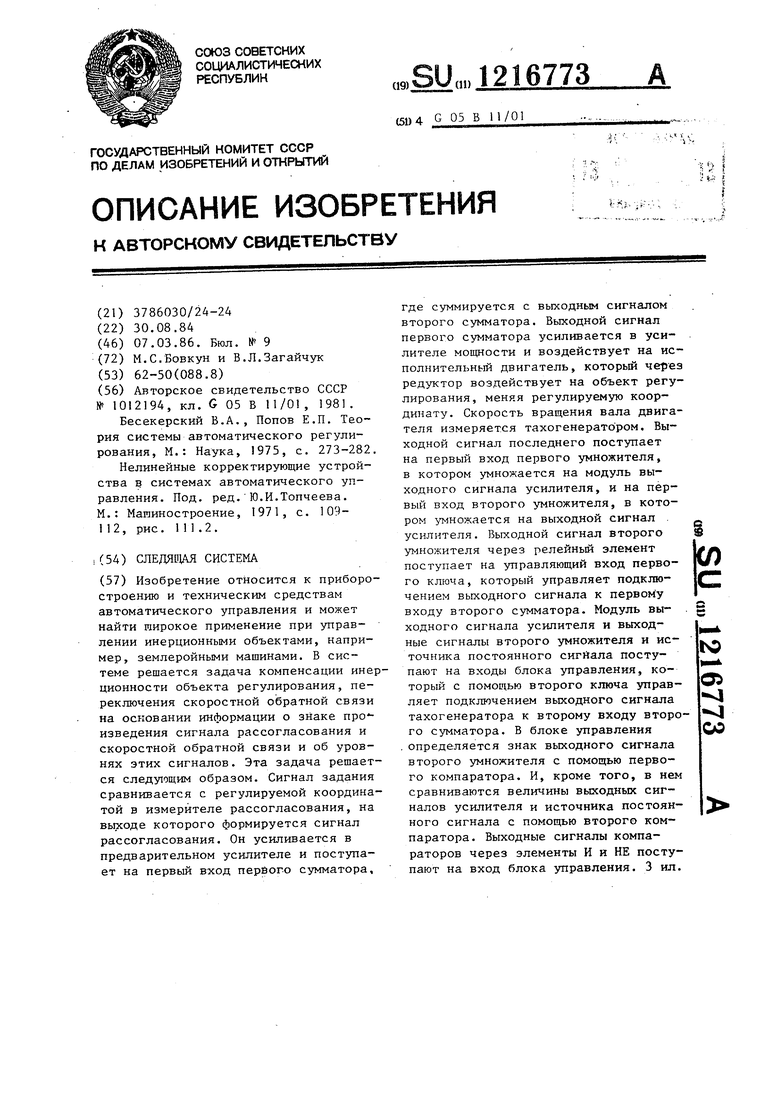
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Бесекерский В,А., Попов Е,П | |||
| Теория системы автоматического регулирования, М.: Наука, 1975, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU273A1 |
| Нелинейные корректирующие устройства в системах автоматического управления | |||
| Под, ред,Ю.И.Топчеева, М,: Машиностроение, 1971, с, 109- 112, рис | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
