1
Изобретение относится к добыче полезного ископаемого подземным способом, а именно к его транспортировке передвижными забойными конвейерами.
Известно устройство для установки привода забойного конвейера, включающее основание и ползун с приводом конвейера, привод конвейера снабжен установленными на основании колонкой и водилом с направляющими, которыми посредством щаровых цапф взаимодействует ползун 1.
Наиболее близким техническим рещением из известных является устройство для управления положением привода забойного конвейера, включающее подъемную платформу для установки привода, соединенные с платформой и основаниями рычаги, а также гидродомкрат поворота рычагов 2.
Недостатком известного устройства является увеличение расстояния рамы головного привода конвейера от почвы из-за наличия иод ним основания, вертикальных направляющих щарнирных двухзвенников и гидродомкратов между платформой и основанием. Увеличенная высота приводной станции увеличивает размер нищи или усложняет выемку комбайном концевого участка лавы и ограничивает область ее применения по вынимаемой мощности пласта. Кроме того, синхронизировать работу двух гидродомкратов практически невозможно и требуется установка двух пультов, что усложняет управление приводной станцией. Снижается надежность работы многочисленных щарнирных соединений и вертикальных направляющих в зоне, где не исключается их защтыбовка.
Целью изобретения является уменьщение высоты устройства.
Для этого рычаги соединены амежду собой горизонтально расиоложенным гидродомкратом, а основания выполнены с горизонтальными пазами, в которых установлены щарниры рычагов с возможностью взаимодействия с упругими элементами, которыми снабжены основания.
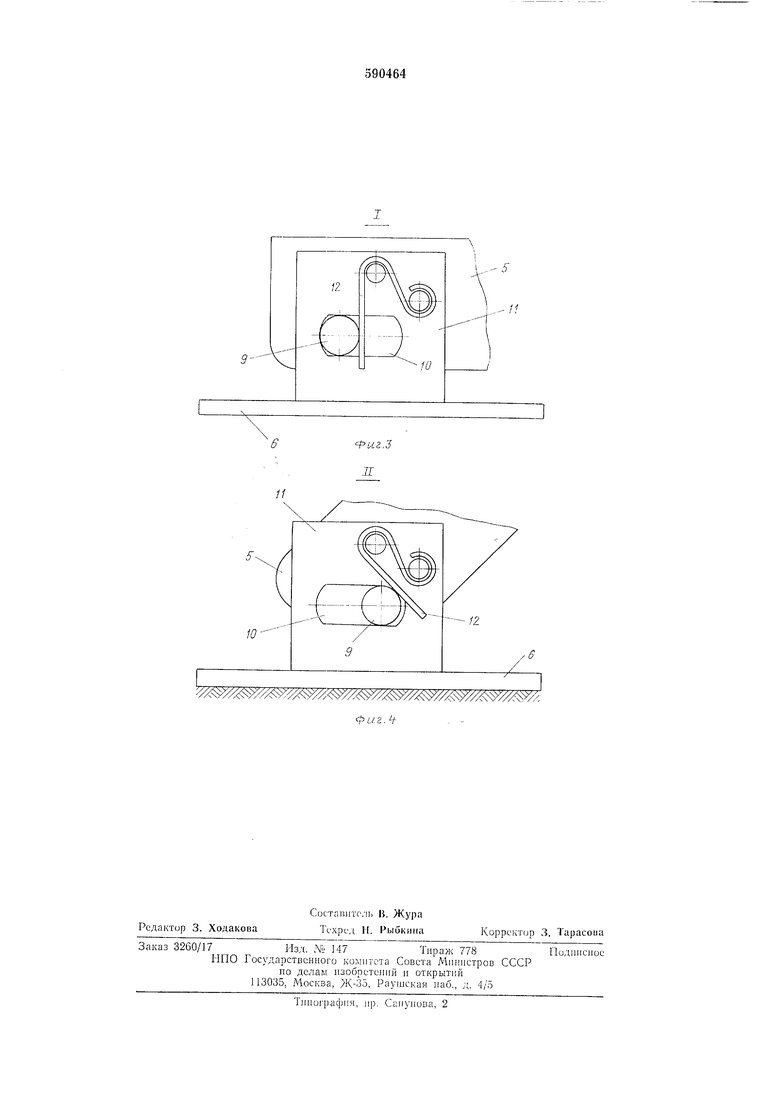
На фиг. 1 изображено предлагаемое устройство для управления головным приводом забойного конвейера, вид спереди; на фиг. 2 - то же, при подъеме головного привода; на фиг. 3 - основание в исходном положеипи (узел 1 на фиг. Ij; иа фиг. 4 - то же, прп подъеме привода (узел И на фиг. 2).
Устройство для управления головным приводом забойного конвейера, состоящего из рамы конвейера со звездочками 1 и приводных блоков 2, включает подъемную платформу 3, гидродомкрат 4, два рычага 5 и осиования 6. Каждый рычаг 5 через щарнир 7 соединен с подъемной платформой 3 и через щарнир 8 - с выдвижиой частью горизонтально расположенного в платформе 3 гидродомкрата. Основание 6 соедииено с рычагом 5 осью 9, которая закреплена на длинном плече рычага 5 и нроходит через горизонтальный направляющий паз 10 в пластинах II, прикрепленных к основанию 6. На пластине 11 установлен упругий элемент 12, (например, пластинчатая пружина), упирающийся в ось 9, ограничивая этим свободное перемещение основания 6 относительно оси 9. Гидродомкрат 4 двустороннего действия через ш:ланги подсоединен к гидрораспределителю.
При подаче жидкости под давлением в поршневую полость гидродомкрата 4 он раздвигается и через щарнир 8 поворачивает рычаг 5 вокруг шарниров 7, которые, опираясь основаниями 6 на почву, осуществляют подъем платформы 3 с установленной на ней рамой с приводными звездочками 1 и блоками 2 конвейера (см. фиг. 2) в месте перегрузки полезного ископаемого на другой конвейер.
С целью устранения боковых нагрузок на привод, возникающих при неровностях почвы под основаниями 6 или больших трениях во время движения этих оснований по почве при подъеме платформы 3, оси 9 перемещаются на соответствующую длину в горизонтальных направляющих пазах 10 пластин 11, закрепленных на основаниях 6. Одновременно при этом обеспечивается приспосабливаемость оснований 6 к неровностям почвы за счет возможности их поворота на осях 9 (см. фиг. 4).
Опускание платформы 3 в исходное положение осуществляется за счет подачи жидкости под давлением в штоковую иолость гидродомкрата 4, что ведет к сокращению его длины и через шарниры 8 к повороту рычагов 5 в шарнирах 7 вверх в вертикальной плоскости. Во время спускания платформы 3 основания 6 иод воздействием упругих элементов 12 на оси 9 возвращаются в исходное положение (см. фиг. 3) п приподнимаются над почвой. В этом случае с почвой контактирует только
подъемная платформа, а рама головного привода конвейера расположена на расстоянии от почвы, определяемом только высотой этой платформы (см. фиг. 1).
Применение в предлагаемом устройстве простой кинематической схемы ее узлов и в качестве силового движения одного гидродомкрата упрощает управление положением головного привода по высоте в период эксплуатапии и уменьшает габариты этого устройства. При этом достигается уменьшение нишп, улучшение перегрузки транспортируемого материала на другой конвейер без увеличения объема работ по подрывке пород почвы в выработке, а также достигаются более благоприятные условия по поддержанию кровли над приводом конвейера при отработке маломощного пласта. Кроме того, уменьшается отрицательное влияние заштыбовки, достигается более надежная работа при управлении.
Формула изобретения
Устройство для управления положением привода забойного конвейера, включающее подъемную платформу для установки привода, соединенные с платформой и основаниями рычаги, а также гидродомкрат поворота рычагов, отличающееся тем, что, с целью уменьшения высоты устройства, рычаги соединены между собой посредство.м горизонтально расположенного гидродомкрата, а основания выполнены с упругими элементами и
горизонтальными пазами, а шарниры рычагов установлены в этих пазах с возможностью взаимодействия с упругими элементами.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 431314, кл. Е 21F 13/08, 1971.
2. Авторское свидетельство СССР №470619, кл. Е 21С 27/32, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для монтажа секций механизированной крепи и конвейера | 1990 |
|
SU1774998A3 |
| КОМБАЙН ДЛЯ СЕЛЕКТИВНОЙ ВЫЕМКИ ПОЛЕЗНОГО ИСКОПАЕМОГОimЙС^-ОСЮЗНА: ;'G-^t":;'";Ei | 1973 |
|
SU362137A1 |
| Забойный скребковый конвейер | 1988 |
|
SU1632885A1 |
| ФРОНТАЛЬНЫЙ ОЧИСТНОЙ АГРЕГАТ | 1970 |
|
SU277680A1 |
| Основание секции механизированной крепи | 1988 |
|
SU1521880A1 |
| ШТРЕКОВЫЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ | 1992 |
|
RU2044890C1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Очистной комбайн | 1984 |
|
SU1234615A1 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Передвижная платформа | 1976 |
|
SU715763A1 |