Изобретение относится к механике, оптике, в частности к технике юстировки (перемещения) оптических элементов.
При исследовании оптических схем, например, интерферометра требуются юстировочные столики малых размеров для близкого расположения оптических элементов, с высокой точностью настройки (лучше 1 мкм) и с высокой жесткостью конструкции, исключающей колебания оптических элементов.
Известен столик от скамьи ОСК-3 для перемещения микроскопа по 3 координатам, но он имеет достаточно грубые подвижки, т.к. там применены соединения подвижных частей - ласточкин хвост, зубчатое колесо и зубчатая рейка. К тому же он имеет большие габариты.
Известны малогабаритные столики с микрометрическим винтом, перемещающиеся по опорным шарикам, расположенным в направляющих пазах, например столики от скамьи ОСК-3 (Россия) фирмы «Standa» (Латвия) или "Edmund Scientific Company" (США), но они имеют прямолинейное перемещение по одной координате. Чтобы получить перемещение по 3 координатам, нужно соединить 3 столика и габариты возрастают. Жесткость конструкции при этом существенно уменьшается.
Наиболее близким к предлагаемому техническому решению является трехкоординатный столик фирмы «Standa», собранный из трех однокоординатных столиков (модулей)…(проспект фирмы «Standa», 2000 г., стр.7-80). Недостатками такого столика (собранного из 3-х однокоординатных модулей) является возрастание габаритов, недостаточная жесткость конструкции, ограниченная чувствительность и точность перемещения.
Задачей, на решение которой направлено предлагаемое изобретение, является объединение в одной конструкции перемещения по 3-м координатам, повышение чувствительности подвижек, улучшение точности перемещения, повышение жесткости столика, уменьшение размеров, упрощение технологии изготовления и сборки.
Технический результат, достигаемый с использованием заявляемого предметного столика, следующий:
- объединены в одной конструкции перемещения по трем координатам;
- уменьшены размеры;
- повышена жесткость конструкции;
- повышена чувствительность и точность подвижек;
- улучшена точность перемещения и повторяемость траектории;
- упрощена технология изготовления и сборки.
Для решения поставленной задачи в известном трехкоординатном столике, содержащем три пары оснований, расположенных одна над другой, причем одно из оснований в каждой паре может перемещаться относительно второго основания, а близлежащие основания двух соседних пар жестко соединены между собой, предлагается.
Все три пары оснований первоначально расположить примерно параллельно друг другу. Одну из трех пар параллельно размещенных оснований (модуль продольного перемещения) установить с возможностью продольного перемещения одного основания в паре относительно второго по двум опорным шарикам, которые размещают в направляющем пазу, расположенном вблизи края внутренней стороны на каждом основании в этой паре и образованном двумя поверхностями, размещенными под углом меньше 90°, причем одна поверхность паза параллельна плоскости основания, в качестве третьей точки опоры между основаниями на противоположном от опорных шариков крае установлен упор, закрепленный только на одном из оснований, либо выполненный в виде одного упорного шарика, а на одном из оснований выполнен упорный паз для размещения упорного шарика, расположенный зеркально направляющему пазу на другом краю той же стороны основания, а на втором основании расположен элемент, который подпружинивает упорный шарик в направлении к плоскости этого основания и к упорному пазу на первом основании. Для продольного перемещения одного основания относительного второго установлен толкатель.
Две других пары оснований выполнены с возможностью отклонения от параллельности одного основания в паре относительно второго за счет поворота основания вокруг оси, проходящей через центры двух опорных шариков и параллельной оси продольного перемещения первой пары, причем основания в каждой паре контактируют между собой в трех точках опоры, две из которых составляют два опорных шарика, расположенных на одном крае внутренних сторон пары оснований и третью точку опоры составляет толкатель, расположенный на противоположном от опорных шариков крае внутренних сторон пары оснований.
Толкатель может быть выполнен в виде юстировочного винта или в виде рычага с двумя юстировочными винтами. Основания подпружинены относительно друг друга таким образом, что исключаются зазоры между контактными поверхностями.
Выполнение только по одному направляющему пазу на каждом основании в модуле продольного перемещения и так, что одна поверхность направляющего паза параллельна плоскости основания, и организация перемещения основания только по трем точкам опоры - двум опорным шарикам и одному упору, замена двух прямолинейных взаимно перпендикулярных перемещений на два перемещения по дугам окружностей с разнесенными центрами, но лежащими в одной плоскости, перпендикулярной продольному перемещению, позволила существенно сократить габариты столика при сохранении трехкоординатного перемещения в пространстве и повысить жесткость конструкции, а также выполнение толкателя в виде рычага с двумя юстировочными винтами позволило повысить чувствительность и точность подвижек, улучшить точность перемещения и повторяемость траектории и упростить технологию изготовления и сборки столика.
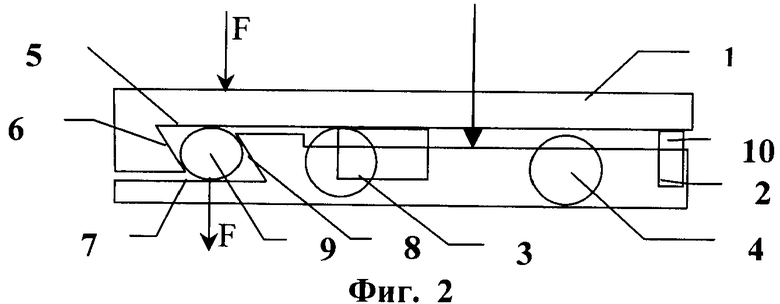
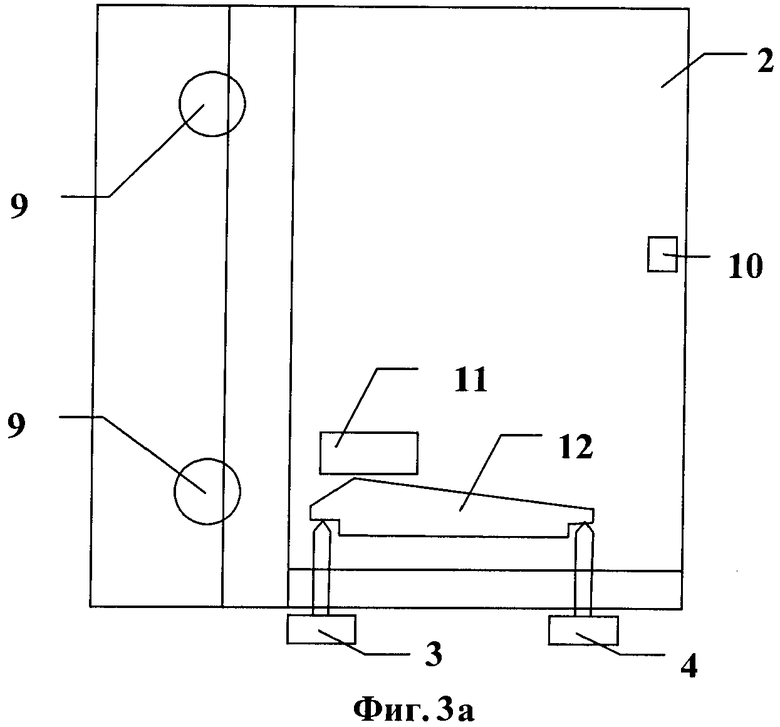
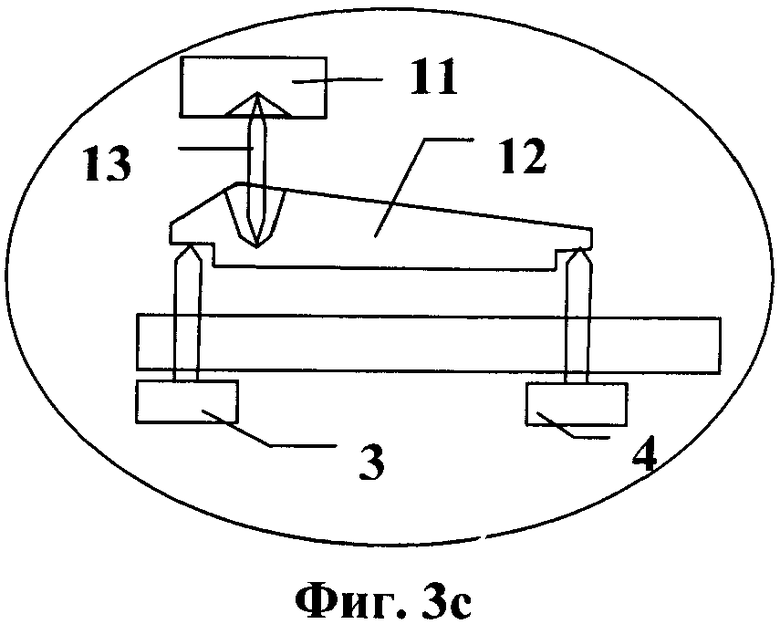
На фиг.1-7 изображены варианты трехкоординатного малогабаритного прецизионного столика, где: 1, 2, 16, 17, 18, 19 - основания, 3 - винт стандартной подвижки, 4 - винт точной подвижки, 5 и 6 - плоскости паза на основании 1; 7 и 8 - плоскости паза на основании 2; 9, 20, 22 - опорные шарики; 10, 21, 23 - упор, 12 - рычаг с различными соотношениями плеч, 13 - развязывающий толкатель, 24 - оптический элемент, 25 - пружина, 26 - упорный шарик, 27 - подпружинивающий элемент.
а) Объединение в одной конструкции перемещения по трем координатам и уменьшение размеров.
Столик состоит из трех пар оснований (см. схему столика на фиг.1): модуля продольного перемещения (основания 1 и 2) и двух модулей с наклоном оснований (пара оснований 16, 17 и пара оснований 18, 19). Прямолинейное перемещение вдоль оптической оси Z осуществляется движением основания 1 относительно основания 2. Направление движения определяется плоскостями паза 5, 6 - на основании 1 и 7, 8 - на основании 2 (фиг.2), каждая пара которых расположена под углом <90°. Контакт между ними осуществляется двумя шариками 9 (фиг.2 и фиг.3а), которые являются двумя точками опоры основания 1, облегчают перемещение за счет качения и сохраняют постоянным расстояние между плоскостями. Третьей точкой опоры, фиксирующей положение плоскости основания 1 в направлении, перпендикулярном плоскости, является упор 10, закрепленный только на одном из оснований, либо выполненный в виде одного упорного шарика 26 (фиг.6), а на одном из оснований выполнен упорный паз для размещения упорного шарика, расположенный зеркально направляющему пазу на другом краю той же стороны основания, а на втором основании расположен элемент 27, который подпружинивает упорный шарик в направлении к плоскости этого основания и к упорному пазу на первом основании. Для продольного перемещения установлен толкатель 3, 4, 12, закрепленный на одном основании, и упор 11, закрепленный на другом основании (фиг.3а). Для обеспечения постоянного контакта с точками опоры и устойчивого положения, верхнее основание 1 подпружинено так, чтобы были составляющие силы: одна - перпендикулярно плоскости основания, вторая - параллельно плоскости и перпендикулярно оси, соединяющей центры шариков (эта ось параллельна оптической оси) и третья - вдоль оси.
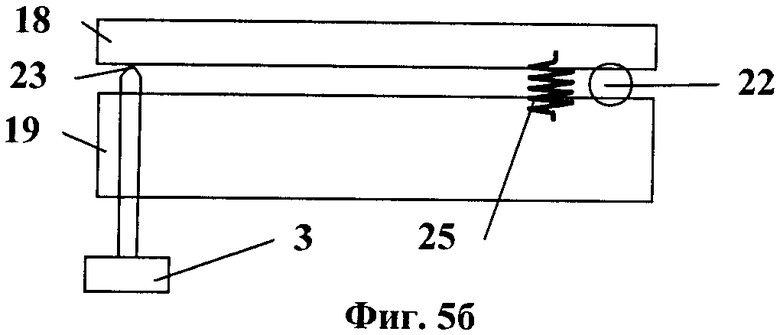
Перемещение оптического элемента 24 (фиг.1) в плоскости ХУ перпендикулярно оптической оси Z, осуществляется поворотом оснований 16 и 18 в полярных системах координат относительно своих осей, параллельных оптической оси Z, но разнесенных между собой. При такой конструкции перемещение центра оптического элемента, находящегося на оптической оси Z, происходит по дуге окружности с радиусом от оси Z до точки оси, относительно которой вращается элемент столика. Осью поворота основания 16 относительно основания 17 является прямая, соединяющая центры двух шариков 20 (фиг.1). Осью поворота основания 18 относительно основания 19 является прямая, соединяющая центры также двух шариков 22 (фиг.1 и 5а). Шарики 20 и 22 расположены в сферических отверстиях на основаниях. Основание 16 с основанием 17 и основание 18 с основанием 19 стянуты пружинами 25 (фиг.5б). Поворот основания 16 относительно основания 17 осуществляется толкателем 21, а основания 18 относительно основания 19 - с помощью толкателя 23, расположенных на противоположных от опорных шариков краях оснований, и являющихся также и третьими точками опоры для каждой пары оснований.
Замена двух прямолинейных взаимно перпендикулярных перемещений на два перемещения по дугам окружностей с разнесенными центрами, но лежащими в одной плоскости, перпендикулярной продольному перемещению, позволила существенно сократить габариты столика при сохранении трехкоординатного перемещения в пространстве.
б) Повышение жесткости столика.
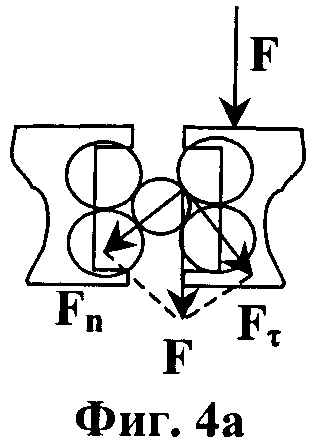
В столиках фирмы «Standa» (фиг.4а) и подобных им, например, столиках от скамьи ОСК-3 (фиг.4б) расположено по два направляющих паза на каждом основании, причем обе поверхности направляющего паза, контактирующие с опорными шариками, составляют с плоскостью основания углы ~ 45° (+45° и -45°). (В столиках фирмы «Standa» поставлены ролики для повышения жесткости направляющих пазов, но принцип остается тот же). В этом случае при нагрузке на столик силы F, перпендикулярно основанию столика, в точках контакта опорных шариков с поверхностями направляющих пазов всегда появляется сила Fτ, действующая на основание и направленная по касательной к этой поверхности, что приводит к неконтролируемым смещениям и уменьшает предельную нагрузку на столик.
В предлагаемой конструкции столика паз для опорных шариков, определяющий направление перемещения, на каждом основании выполнен только один и с одной стороны основания, угол между поверхностями паза меньше 90°, причем одна поверхность паза параллельна плоскости основания. В качестве третьей точки опоры на противоположной от шариков стороне основания поставлен упор. В таком варианте при нагрузке F, перпендикулярно основанию столика, силы в точках контакта опорных шариков и упора с направляющими поверхностями направлены только нормально к поверхностям в точках контакта (фиг.2). Такая конструкция позволяет прикладывать к основанию существенно большую нагрузку, нежели в прототипе, поскольку отсутствуют боковые сдвигающие силы.
Для модуля с наклоном основания (фиг.5) два опорных шарика 22 расположены в сферических углублениях того же радиуса, в качестве третьей точки опоры на противоположной стороне поставлен упор 23. Основания между собой стянуты пружиной 25. Причем пружина смещена значительно ближе к шарикам для создания существенно большего поджатия оснований к шарикам, что обеспечивает точное скольжение основания по поверхности шариков при повороте основания и препятствует соскальзыванию с шариков при боковых нагрузках. Нагрузка, перпендикулярно верхнему основанию создает через опорный шарик нагрузку на нижнее основание, также направленную перпендикулярно к нижнему основанию. Этот модуль имеет еще более высокую жесткость, нежели модуль с продольным перемещением.
с) Повышение чувствительности и точности подвижек.
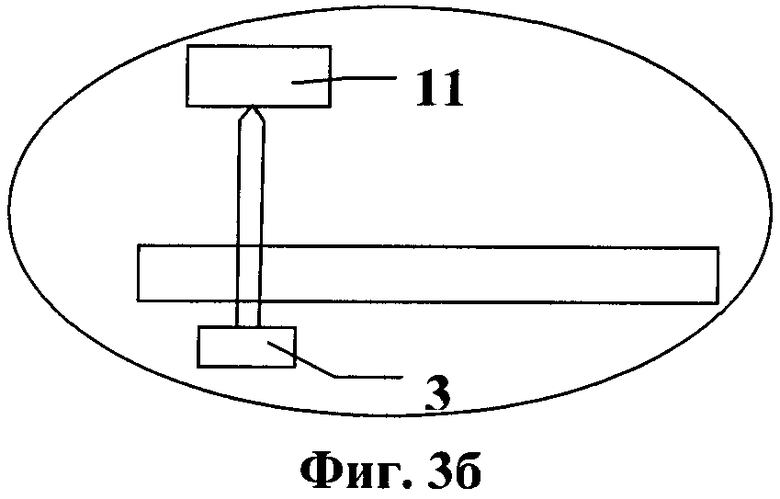
Упоры перемещаются с помощью котировочных винтов или в качестве упора используется сам котировочный винт 3 (фиг.3б). Для повышения чувствительности и точности подвижек введено на каждую подвижку по два винта - винт «обычной (стандартной)» подвижки 3 и винт «точной» подвижки 4 (фиг.3с). Эти винты перемещают толкатель 13 через рычаг 12 с различным соотношением плеч. Для винта «стандартной» подвижки 3 соотношение плеч близко к ~ 1:1, для винта «точной» подвижки 4 соотношение плеч может быть выполнено в диапазоне от 1:3 до ~1:10. Поэтому чувствительность винта «точной» подвижки повышается в несколько раз в соответствии с соотношением плеч рычага. Аналогично сделано и для подвижки по оптической оси.
д) Улучшение точности перемещения и повторяемости траектории.
Выполнение только по одному направляющему пазу на каждом основании и так, что одна поверхность направляющего паза параллельна плоскости основания (фиг.2) и организация перемещения основания только по трем точкам опоры - двум опорным шарикам 9, 9 и одному упору 10 (фиг.3а) в модуле продольного перемещения по оси Z, а также выполнение толкателя в виде рычага 12 с двумя котировочными винтами 3 и 4 (фиг.3а), наряду с усилением жесткости конструкции позволило улучшить точность перемещения и повторяемость траектории основания.
Замена двух прямолинейных взаимно перпендикулярных перемещений на два перемещения по дугам окружностей с разнесенными центрами, но лежащими в одной плоскости, перпендикулярной продольному перемещению, позволила не только существенно сократить габариты столика при сохранении трехкоординатного перемещения в пространстве и повысить жесткость конструкции, но и улучшить точность перемещения и повторяемость траектории.
е) Упрощение технологии изготовления и сборки.
В прототипе необходимо строгое выполнение и совмещение с высокой параллельностью образующих всех четырех пазов на двух основаниях. В предлагаемой конструкции модуля с продольным перемещением основания на каждом основании выполнено только по одному пазу, определяющему направление перемещения. В этом случае при изготовлении необходимо обеспечить параллельность только одной поверхности паза со стороной основания, что, фактически, получается при обработке этих поверхностей на станке с одной установки. При постановке шариков в пазы упора и подпружинивании оснований образующие пазов, определяющие направление перемещения, автоматически устанавливаются параллельно. Аналогично и для модуля с наклоном основания. Постановка двух шариков в сферические углубления оснований, упора и подпружинивание оснований сразу создает работоспособный модуль.
Был изготовлен макет такого столика (см. фиг.8). Столик имеет размеры чуть больше спичечного коробка (50×45×23 мм). Тем не менее, при таких малых размерах он имеет прецизионные подвижки по трем направлениям. По каждой оси имеется винт обычной (3) и винт точной (4) подвижки. Не смотря на то, что перемещение в плоскости ХУ происходит за счет наклона оснований 1 или 2, на конечном этапе юстировки с применением винтов точной подвижки, когда перемещение составляет единицы или десятки микрон, движение точки происходит практически по прямой. Так, при длине перемещения 40 мкм стрелка прогиба траектории точки составляет всего 0,02 мкм.
При отработке и доводке макета столика достигнуты следующие параметры. Диапазон подвижек по осям составляет: 7 мм по оси скамьи (по оптической оси Z) и по 5 мм по двум другим направлениям (в плоскости ХУ), перпендикулярным оптической оси. Чувствительность точной подвижки составляет ~ 0,2-0,3 мкм, повторяемость траектории тоже ~ 0,3 мкм. При этом отсутствуют люфты элементов столика и свободный ход винтов. Значительно повышена жесткость столика. Столик удобен для юстировки осесимметричных оптических элементов или элементов, для которых несущественен поворот по оптической оси на небольшой угол (≤9°). Столик позволяет автоматизировать перемещение и управление при постановке на юстировочные винты шаговых двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2008 |
|
RU2394259C1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2005 |
|
RU2336545C2 |
| УСТРОЙСТВО ДЛЯ ПРЕЦИЗИОННОГО ВРАЩЕНИЯ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2008 |
|
RU2365950C1 |
| Устройство юстировки и фиксации микрооптических элементов | 1990 |
|
SU1735790A1 |
| ЮСТИРОВОЧНЫЙ МЕХАНИЗМ ЭЛЕМЕНТОВ ОПТИЧЕСКИХ СХЕМ | 2017 |
|
RU2663274C1 |
| Устройство для полирования торцов оптических наконечников | 1988 |
|
SU1549731A1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С ЖИДКОСТНОЙ ЯЧЕЙКОЙ | 2001 |
|
RU2210818C2 |
| ОТРАЖАТЕЛЬНЫЙ УГЛОМЕРНЫЙ ИНСТРУМЕНТ | 2001 |
|
RU2190188C1 |
| УСТРОЙСТВО ДЛЯ ПРЕЦИЗИОННОГО ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2007 |
|
RU2348952C2 |
| Юстировочное устройство | 1989 |
|
SU1707588A1 |




Изобретение относится к средствам юстировки оптических элементов и направлено на уменьшение габаритов и повышение жесткости конструкции, на повышение чувствительности и точности подвижек, упрощение технологии изготовления и сборки, что обеспечивается за счет того, что трехкоординатный прецизионный столик включает три пары параллельно размещенных оснований. Одна пара установлена с возможностью продольного перемещения одного основания в паре относительно второго по двум опорным шарикам, которые размещают в направляющем пазу, расположенном вблизи края внутренней стороны на каждом основании в этой паре и образованном двумя поверхностями, размещенными под углом меньше 90°, причем одна поверхность паза параллельна плоскости основания. В качестве третьей точки опоры между основаниями на противоположном от опорных шариков крае установлен упор, закрепленный только на одном из оснований, либо выполненный в виде одного упорного шарика. Для продольного перемещения одного основания относительного второго установлен толкатель. Две других пары оснований выполнены с возможностью отклонения от параллельности одного основания в паре относительно второго за счет поворота основания вокруг оси, проходящей через центры двух опорных шариков и параллельной оси продольного перемещения первой пары, причем основания в каждой паре контактируют между собой в трех точках опоры, две из которых составляют два опорных шарика, расположенных на одном крае внутренних сторон пары оснований и третью точку опоры составляет толкатель, расположенный на противоположном от опорных шариков крае внутренних сторон пары оснований. Толкатель может быть выполнен в виде юстировочного винта или в виде рычага с двумя котировочными винтами. Основания подпружинены относительно друг друга таким образом, что исключаются зазоры между контактными поверхностями. 2 н. и 6 з.п. ф-лы, 7 ил.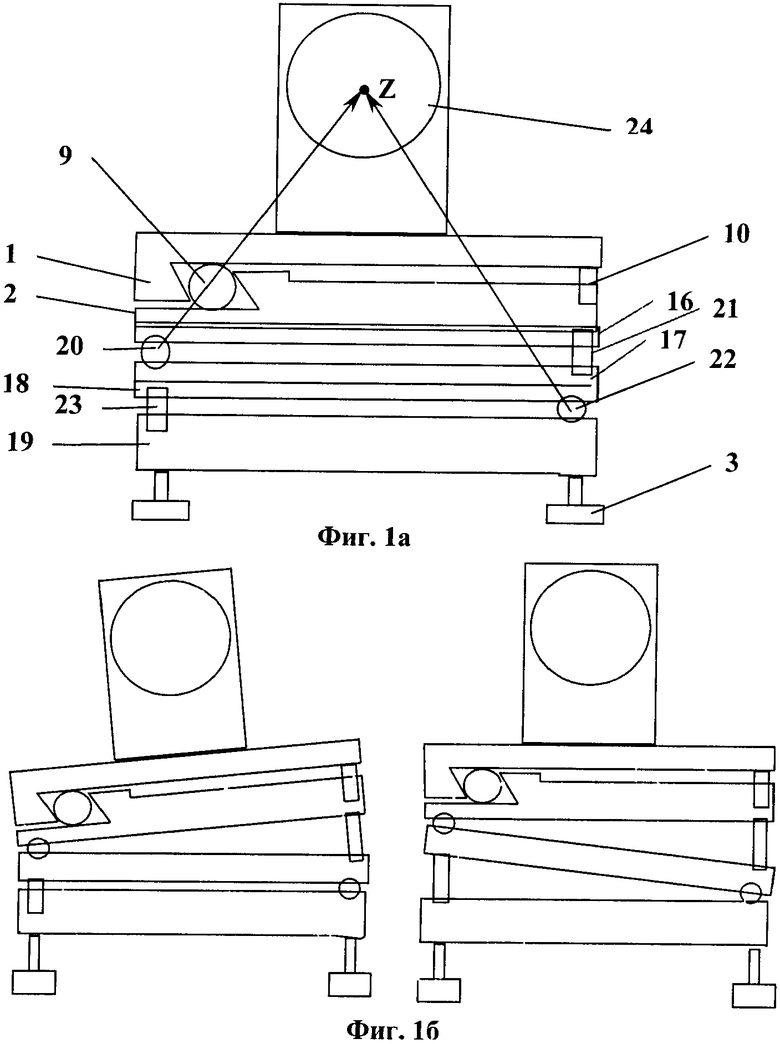
1. Трехкоординатный прецизионный столик, содержащий три пары оснований, расположенные одна над другой, причем одно из оснований в каждой паре может перемещаться относительно второго основания, а близлежащие основания двух соседних пар жестко соединены между собой, отличающийся тем, что все основания первоначально размещены примерно параллельно друг другу, причем одна пара параллельно размещенных оснований установлена с возможностью продольного перемещения по двум опорным шарикам, размещенным в направляющем пазу, расположенном вблизи края одной из сторон на каждом основании и образованном двумя поверхностями, размещенными под углом меньше 90°, причем одна поверхность паза параллельна плоскости основания, а в качестве третьей точки опоры между основаниями на противоположном от опорных шариков крае установлен упор, закрепленный только на одном из оснований, а для продольного перемещения установлен толкатель, а основания подпружинены относительно друг друга таким образом, что исключаются зазоры между контактными поверхностями, две других пары оснований выполнены с возможностью отклонения от параллельности одного основания в паре относительно второго за счет поворота основания вокруг оси, проходящей через центры двух опорных шариков и параллельной оси продольного перемещения третьей пары, причем основания в каждой паре контактируют между собой в трех точках опоры, две из которых составляют два опорных шарика, расположенных на одном крае внутренних сторон пары оснований и третью точку опоры составляет толкатель, расположенный на противоположном от опорных шариков крае внутренних сторон пары оснований.
2. Трехкоординатный прецизионный столик по п.1, отличающийся тем, что толкатель выполнен в виде юстировочного винта.
3. Трехкоординатный прецизионный столик по п.1, отличающийся тем, что толкатель выполнен в виде разноплечного рычага, плечи которого размещены на юстировочных винтах.
4. Трехкоординатный прецизионный столик по п.1, отличающийся тем, что толкатель выполнен в виде разноплечного рычага с развязывающим толкателем, а плечи рычага размещены на юстировочных винтах.
5. Трехкоординатный прецизионный столик, содержащий три пары оснований, расположенные одна над другой, причем одно из оснований в каждой паре может перемещаться относительно второго основания, а близлежащие основания двух соседних пар жестко соединены между собой, отличающийся тем, что все основания первоначально размещены примерно параллельно друг другу, причем одна пара параллельно размещенных оснований установлена с возможностью продольного перемещения по двум опорным шарикам, размещенным в направляющем пазу, расположенном вблизи края одной из сторон на каждом основании и образованном двумя поверхностями, размещенными под углом меньше 90°, причем одна поверхность паза параллельна плоскости основания, а в качестве третьей точки опоры между основаниями на противоположном от опорных шариков крае установлен упор, выполненный в виде одного упорного шарика, а на одном из оснований выполнен упорный паз для размещения упорного шарика, расположенный зеркально направляющему пазу на другом краю той же стороны основания, а на втором основании расположен элемент, который подпружинивает упорный шарик в направлении к плоскости этого основания и к упорному пазу на первом основании, а для продольного перемещения установлен толкатель, а основания подпружинены относительно друг друга таким образом, что исключаются зазоры между контактными поверхностями, две других пары оснований выполнены с возможностью отклонения от параллельности одного основания в паре относительно второго за счет поворота основания вокруг оси, проходящей через центры двух опорных шариков и параллельной оси продольного перемещения третьей пары, причем основания в каждой паре контактируют между собой в трех точках опоры, две из которых составляют два опорных шарика, расположенных на одном крае внутренних сторон пары оснований и третью точку опоры составляет толкатель, расположенный на противоположном от опорных шариков крае внутренних сторон пары оснований.
6. Трехкоординатный прецизионный столик по п.5, отличающийся тем, что толкатель выполнен в виде котировочного винта.
7. Трехкоординатный прецизионный столик по п.5, отличающийся тем, что толкатель выполнен в виде разноплечного рычага, плечи которого размещены на юстировочных винтах.
8. Трехкоординатный прецизионный столик по п.5, отличающийся тем, что толкатель выполнен в виде разноплечного рычага с развязывающим толкателем, а плечи рычага размещены на юстировочных винтах.
| ПРОСПЕКТ ФИРМЫ «STANDA», 2000, с.7-8 | |||
| УСТРОЙСТВО ДЛЯ ДОВОДКИ РЕЖУЩИХ КРОМОК ЛЕЗВИЙ БЕЗОПАСНЫХ БРИТВ | 1991 |
|
RU2096161C1 |
| Способ изготовления электрических контактов | 1937 |
|
SU51574A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| DE 19601018 А1, 01.08.1996 | |||
| US 4772109 A, 20.09.1988. | |||

