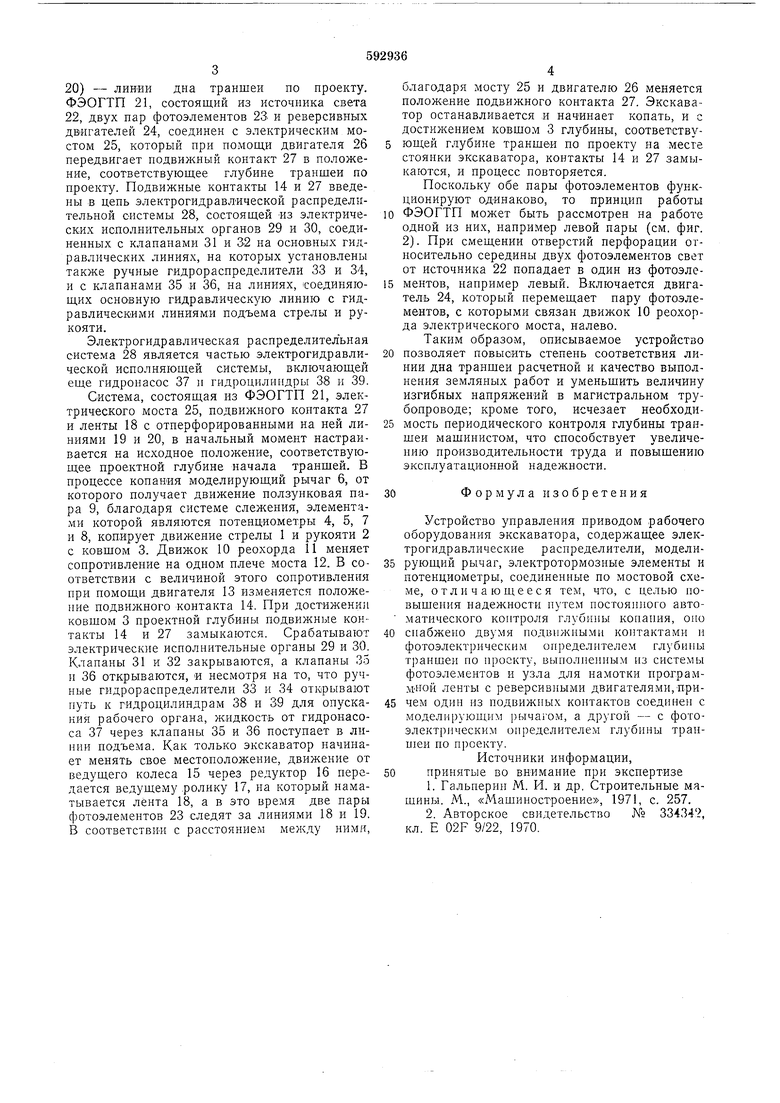
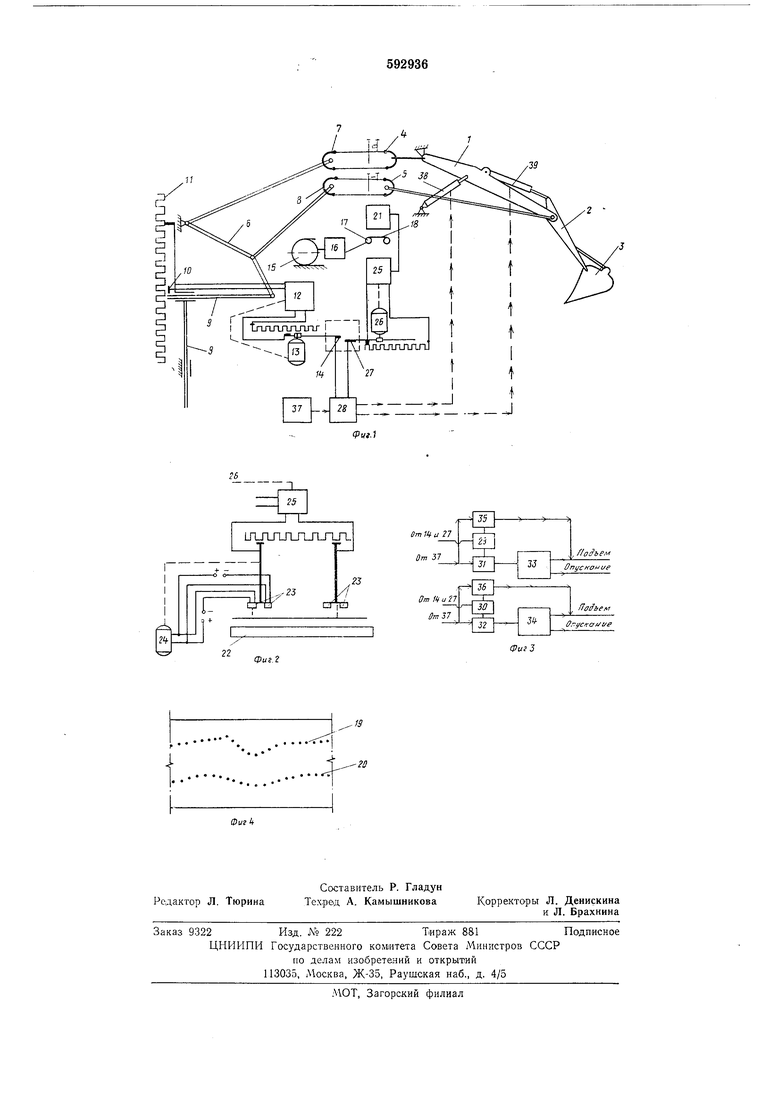
20) - ЛИВИИ дна траншеи по проекту. ФЭОГТП 21, состоящий из источника света 22, двух пар фотоэлементов 23 и реверсивных двигателей 24, соединен с электрическим мостом 25, который при помощи двигателя 26 передвигает подвижный контакт 27 в положение, соответствующее глубине транщеи по проекту. Подвижные контакты 14 и 27 введены в цепь электрогидравлИческой распределительной системы 28, состоящей из электрических исполнительных органов 29 и 30, соединенных с клапанами 31 и 32 на основных гидравлических линиях, на которых установлены также ручные гидрораспределители 33 и 34, и с клапанами 35 и 36, на линиях, соединяющих основную гидравлическую линию с гидравлическими линиями подъема стрелы и рукояти.
Электрогидравлическая распределительная система 28 является частью электрогидравлической исполняющей системы, включающей еще гидронасос 37 и гпдроцилппдры 38 и 39.
Система, состоящая из ФЭОГТП 21, электрического моста 25, подвижного контакта 27 и ленты 18 с отперфорированными на ней линиями 19 и 20, в начальный момент настраивается на исходное положение, соответствующее проектной глубине начала транщеи. В процессе копания моделирующий рычаг 6, от которого получает движение ползунковая пара 9, благодаря системе слежения, элементами которой являются потенциометры 4, 5, 7 и 8, копирует движение стрелы 1 и рукояти 2 с ковщом 3. Движок 10 реохорда 11 меняет сопротивление на одном плече моста 12. В соответствии с величиной этого сопротивления при номощн двигателя 13 изменяется положение подвижного контакта 14. При достижени 1 ковщом 3 проектной глубины подвижные контакты 14 и 27 замыкаются. Срабатывают электрические исполнительные органы 29 и 30. Клапаны 31 и 32 закрываются, а клапаны 35 и 36 открываются, и несмотря на то, что ручные гидрораспределители 33 и 34 открывают путь к гидроцилиндрам 38 и 39 для опускания рабочего органа, жидкость от гидронасоса 37 через клапаны 35 и 36 поступает в линии подъема. Как только экскаватор начинает менять свое местоположение, движение от ведущего колеса 15 через редуктор 16 передается ведущему .ролику 17, на который наматывается лента 18, а в это время две пары фотоэлементов 23 следят за линиями 18 и 19. В соответствии с расстоянием между нимя.
благодаря мосту 25 и двигателю 26 меняется положение подвижного контакта 27. Экскаватор останавливается и начинает копать, и с достижением ковщом 3 глубины, соответствующей глубине транщеи по проекту на месте стоянки экскаватора, контакты 14 и 27 замыкаются, и процесс повторяется.
Поскольку обе пары фотоэлементов функционируют одинаково, то принцип работы
ФЭОГТП может быть рассмотрен на работе одной из них, например левой пары (см. фиг. 2). При смещении отверстий перфорации относительно середины двух фотоэлементов свет от источника 22 попадает в один из фотоэлементов, например левый. Включается двигатель 24, который перемещает пару фотоэлементов, с которыми связан движок 10 реохорда электрического моста, налево.
Таким образом, описываемое устройство
позволяет повысить степень соответствия линии дна транщеи расчетной и качество выполнения земляных работ и уменьщить величину изгибных напряжений в магистральном трубопроводе; кроме того, исчезает необходимость периодического контроля глубины транщеи машинистом, что способствует увеличению производительности труда и повышению эксплуатационной надежности.
Формула изобретения
Устройство управления приводом рабочего оборудования экскаватора, содержащее электрогидравлические распределители, моделирующий рычаг, электротормозные элементы и потенциометры, соединенные по мостовой схеме, отличающееся тем, что, с целью повыщения надежности путем постоянного автоматического контроля глубины копапия, оно
снабжено двумя подвижными контактами и фотоэлектрическим определителем глубины транщеи по проекту, выполненным пз системы фотоэлементов и узла для намотки програмМНой ленты с реверсивными двигателями, причем один из подвижных контактов соединен с моделирующим рычагом, а другой - с фотоэлектрическим определителем глубины траншеи по проекту.
Источники информации,
принятые во внимание при экспертизе
1.Гальперин М. П. и др. Строительные машины. М., «Машиностроение, 1971, с. 257.
2.Авторское свидетельство № 334342, кл. Е 02F 9/22, 1970.
35
2 J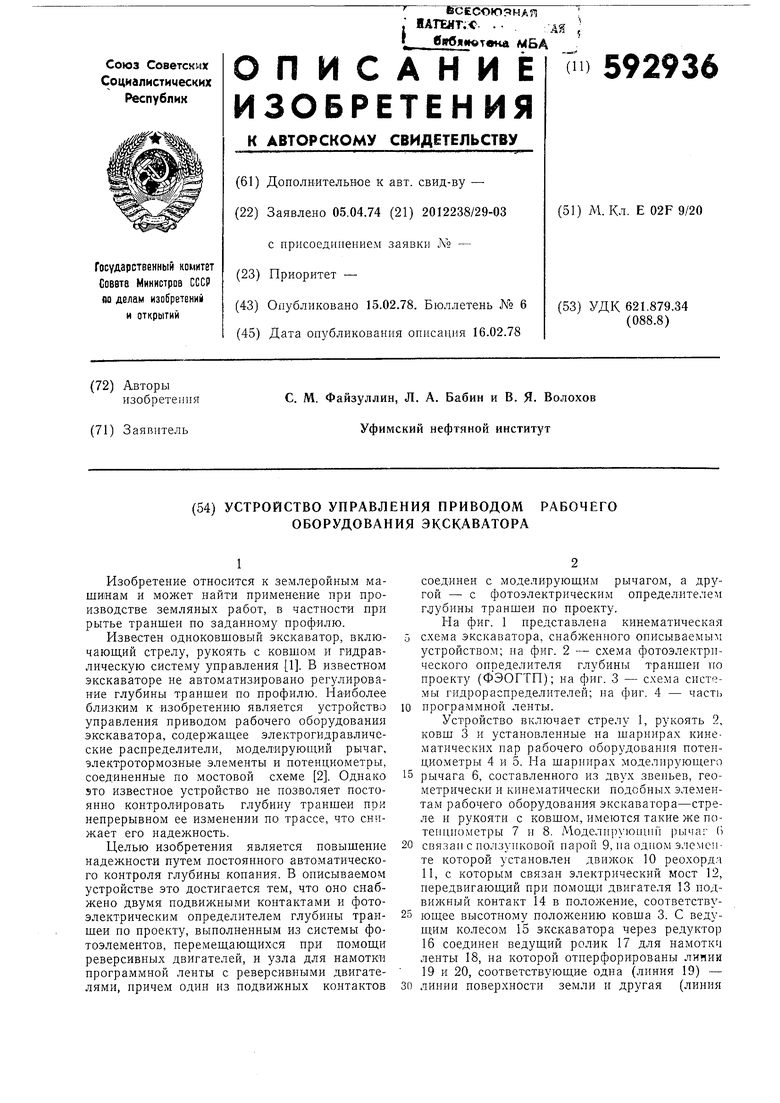
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный экскаватор | 1974 |
|
SU610922A1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 1990 |
|
RU2029828C1 |
| ЭКСКАВАТОР-ДРЕНОУКЛАДЧИК | 1971 |
|
SU319251A1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| ЗЕМЛЕРОЙНО-МЕЛИОРАТИВНАЯ МАШИНА | 1972 |
|
SU420732A1 |
| Автоматический потенциометр постоянного тока | 1960 |
|
SU134765A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1967 |
|
SU202741A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
| Устройство управления весовым непрерывным дозированием | 1977 |
|
SU746199A1 |
LJ iZj
(f l/CfOf/l ff
