земляных работ при неравномерной глубине залегания подземных коммуникаций (ПК). Устройство включает индукционную рамку 16, генератор 15, индукционные магнитоприемники (ИМП) 8 и 12, корректор 9, фазовращатель 13, сумматор 14, коммутатор 10, определитель экстремума 17, индикато 18, делитель 11, датчики 1 и 2 угла отклонения рукояти и ковша, косинус- Hbte преобразователи 4 и 5, блок 3 ввода постоянных длины ковша, расстояния от точки поворота ковша до toчки крепления ИМП 8 и 12 к рукояти и толщины слоя, оставляемого над ПК грунта, и блок 6 управления приводом- 7 стрелы. Генератор 15 выраба- тьшает низкочастотные сигналы. Вокруг кабеля ПК 22осоздается магнитное поле, которое наводит ЭДС в ШП
i
Изобретение относится к устройст- вам для автоматического регулирования положения рабочего органа.строительных машин и может быть использовано в землеройньж машинах, пред- назначенных для отрывки котлованов над подземными токопроводящимн комму никациями, в частности в гидравлических экскаваторах.
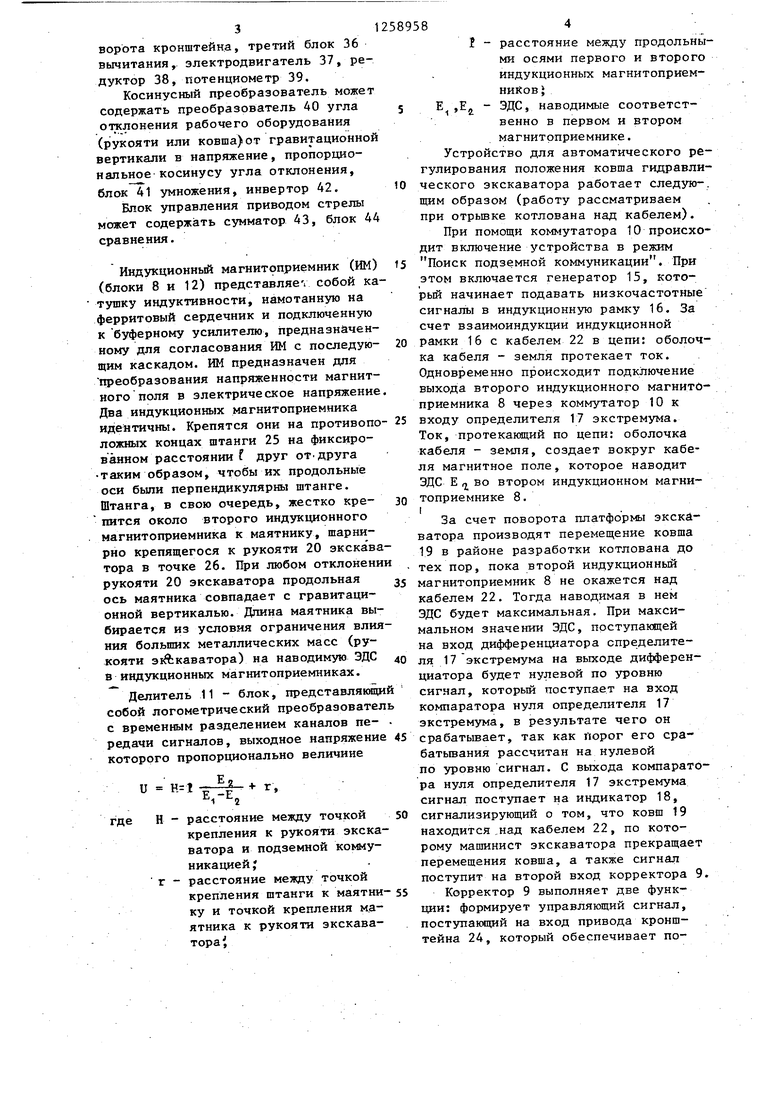
Целью изобретения является повышение надежности за счет обеспечения безопасности проведения земельных работ при неравномерной глубине за- лётания подземньи коммуникаций. На фиг.1 представлен экскаватор
(общий вид) и блок-схема устройства
на фиг. 2 - корректор; на фиг,. 3 косинусный преобразователь; на
фиг. 4 - блок управления привода
стрелы.
Устройство содержит датчик 1 угла отклонения рукояти экскаватора от гравитационной вертикали, датчик
2угла отклонения ковша экскаватора от гравитационной вертикали, блок
3ввода постоянных длины ковша, расстояния от точки поворота ковша до точки крепления индукционньк магни- топриемнйков к рукояти экскав1атора и толщины слоя оставляемого над
8 и 12. При нахождении ИМП 8 над кабелем ЭДС в нем максимальна, о чем подаетсй сигнал с определителя экстремума 17 на индикатор 18. В делителе 11 непрерывно определяется расстояние (Н) от точки крепления ИМП 8 и 12 к рукояти до ПК. С помощью датчиков 1 и 2 и блока 3 определяется расстояние по вертикали от этой точки крепления до режущей кромки ковща (РКК). По разности (ЛН) зтих расстояний в блоке 6 определяется расстояние между РКК и ПК. При достижении дН заданного блоком 3 значения формируется управляющий сигнал на привод 7 стрелы. Изменяется пространственное положение стрелы. При этом заданное расстояние между ПК и РКК сохраняется. Тем самым ПК предохраняется от повреждения. 4 ил.
подземной коммуникацией грунта, первый косинусный преобразователь 4, второй косинусный преобразователь 5, блок 6 управления приводом стрелы, привод 7 стрелы экскаватора, второй индукционный магнитоприемник 8, корректор 9, коммутатор 10, делитель 11, первый индукционный магнитоприемник 12, фазовращатель 13, сумматор 14, генератор 15, индукционную рамку 16, определитель 17 экстремума, индикатор 18, ковш 19, рукоять 20 экскаватора, стрелу 21 экскаватора, подземную коммуникацию 22, кронштейн 23, привод 24 кронштейна, штангу.25, на которую крепятся индукционные магнитоприемники, точ ку 26 Крепления маятника к рукояти экскаватора
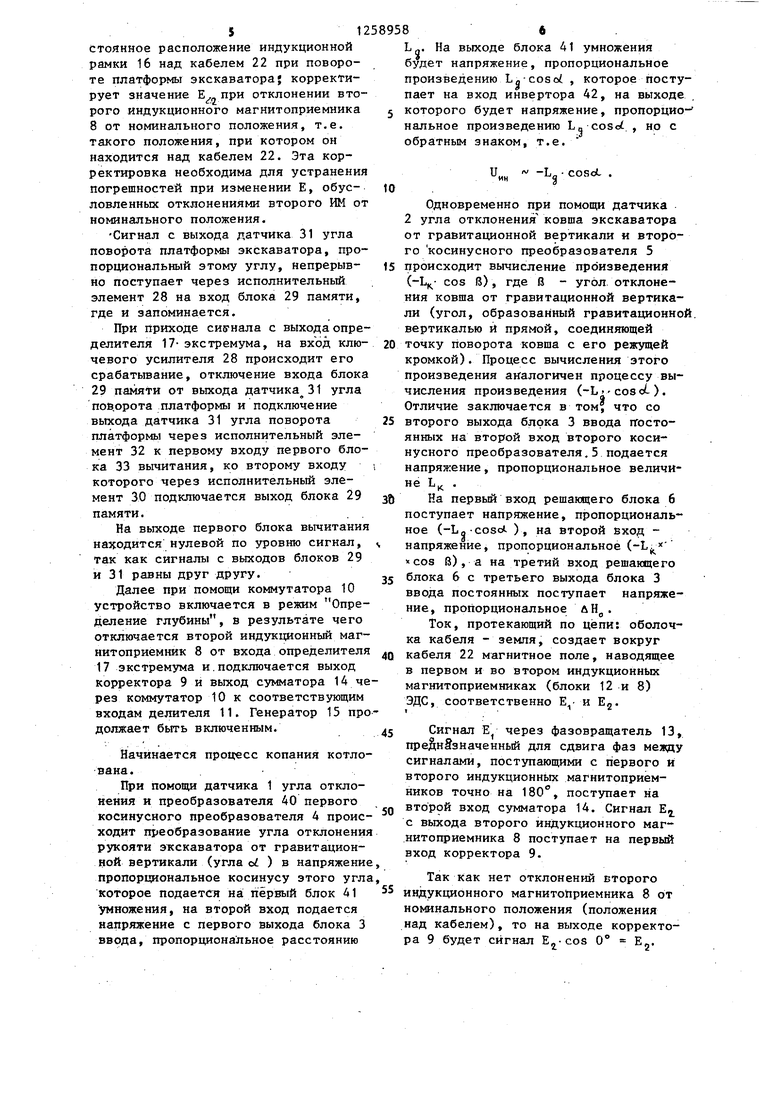
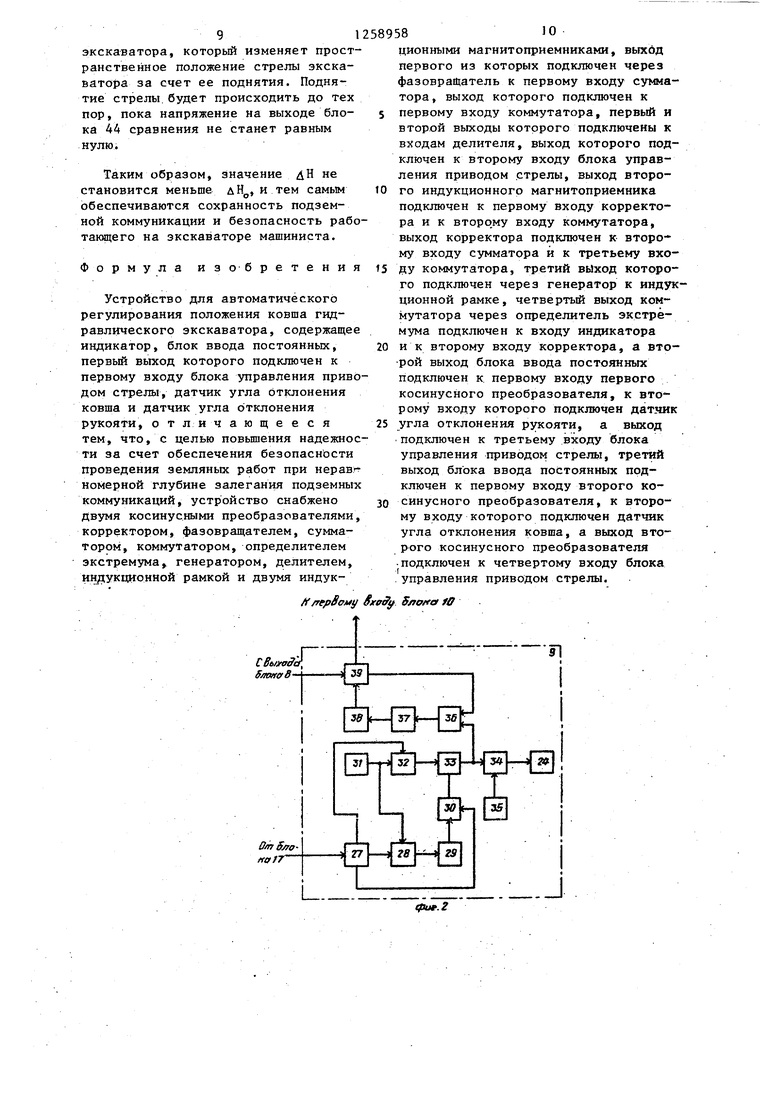
Корректор 9 содерясит ключевой усилитель 27, исполнительньй элемен 28 в виде, например, контактов реле блок 29 памяти, исполнительньй элемент 30 в видej например, контактов реле, датчик 31 угла поворота плат- фЬрмы экскаватора с рабочим оборудованием, исполнительный элемент 32 в виде, например, контактов реле, первый блок 33 вычитания, второй блок 34 вычитания, датчик 35 угла пворота кронштейна, третий блок 36 вычитания, электродвигатель 37, редуктор 38, потенциометр 39.
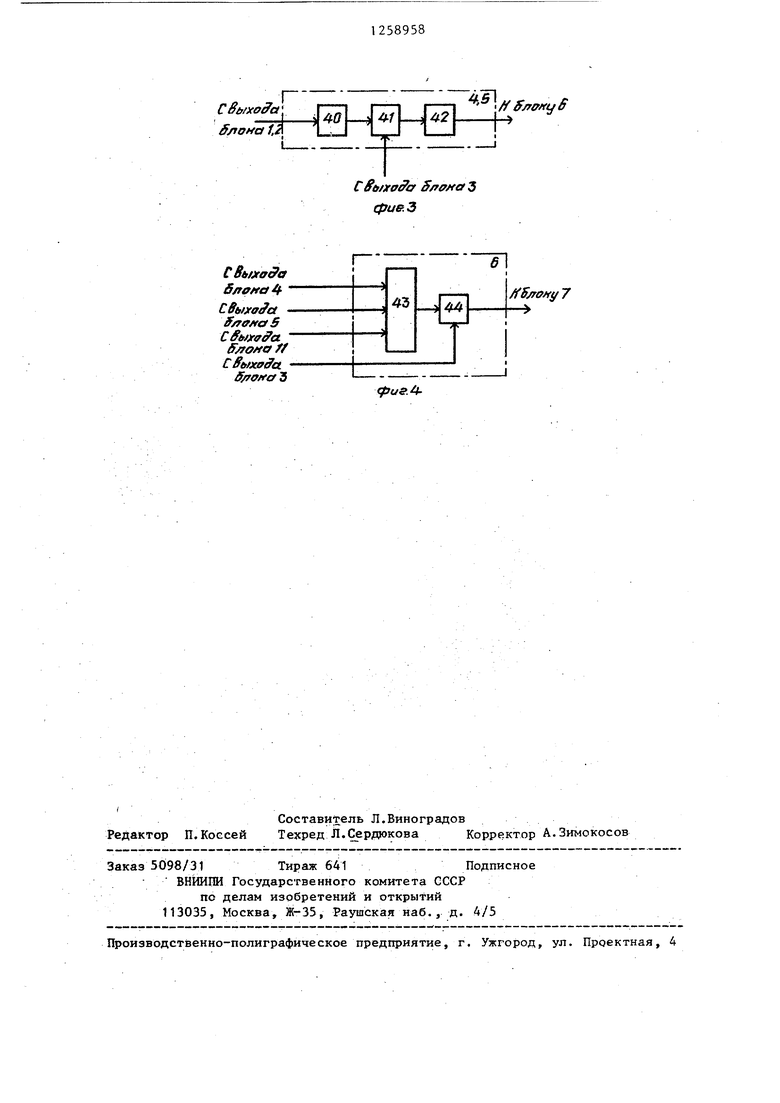
Косинусный преобразователь может содержать преобразователь 40 угла отклонения рабочего оборудования (рукояти или ковша)от гравитационной вертикали в напряжение, пропорциональное косинусу угла отклонения, блок 41 умножения, инвертор 42.
Блок управления приводом стрелы может содержать сумматор 43, блок 44 сравнения.
20
Индукционный магнитоприемник (ИМ) (блоки 8 и 12) представляе-. собой катушку индуктивности, намотанную на ферритовый сердечник и подключенную к буферному усилителю, предназначенному для согласования ИМ с последующим каскадом. ИМ предназначен для преобразования напряженности магнитного поля в электрическое напряжение. Два индукционных магнитоприемника идентичны. Крепятся они на противопо- 25 ложных концах штанги 25 на фиксированном расстоянии f друг от.друга таким образом, чтобы их продольные оси были перпендикулярны штанге. Штанга, в свою очередь, жестко кре- ЗО пится около второго индукционного магнитоприемника к маятнику, шарни- рно крепящегося к рукояти 20 экскаватора в точке 26. При любом отклонении рукояти 20 экскаватора продольная ось маятника совпадает с гравитационной вертикалью. Длина маятника выбирается из условия ограничения влияния больших металлических масс (рукояти эЛкаватора) на наводимую ЭДС до в индукционных магнитоприемниках.
Делитель 11 - блок, представлякяций собой логометрический преобразователь с временным разделением каналов пе- . редачи сигналов, выходное напряжение 45 которого пропорционально величине
Е
t5
и
г.
Н - расстояние между точкой 50 крепления к рукояти экскаватора и подземной коммуникацией ; г - расстояние между точкой
крепления штанги к маятни- 55 ку и точкой крепления маятника к рукояти экскаватора i
расстояние между продольными осями первого и второго индукционных магнитоприем- ников J
Е Ej - ЭДС, наводимые соответственно в первом и втором магнитрприемнике.
Устройство для автоматического регулирования положения ковша гидравли- ческого экскаватора работает следую-, щим образом (работу рассматриваем при отрьшке котлована над кабелем).
При помощи коммутатора 10 происходит включение устройства в режим Поиск подземной коммуникации. При этом включается генератор 15, который начинает подавать низкочастотные сигналы в индукционную рамку 16. За счет взаимоиндукции индукционной рамки 16 с кабелем 22 в цепи: оболочка кабеля - земля протекает ток. Одновременно происходит подключение выхода второго индукционного магнитй- приемника 8 через коммутатор 10 к входу определителя 17 экстремума. Ток, протекакнций по цепи: оболочка кабеля - земля.
ЭДС Е ,j во втором индукционном магнитоприемнике 8,
I.
За счет поворота платформы экскаватора производят перемещение ковша 19 в районе разработки котлована до тех пор, пока второй индукционный магнитоприемник 8 не окажется над кабелем 22. Тогда наводимая в нем ЭДС будет максимальная. При максимальном значении ЭДС, поступающей на вход дифференциатора определителя 17 экстремума на выходе дифференциатора будет нулевой по уровню сигнал, который поступает на вход компаратора нуля определителя 17 экстремума, в результате чего он срабатьшает, так как порог его сра- батьшания рассчитан на нулевой по уровню сигнал. С выхода компаратора нуля определителя 17 экстремума сигнал поступает на индикатор 18, сигнализирующий о том, что ковш 19 находится над кабелем 22, по которому машинист экскаватора прекращает перемещения ковша, а также сигнал поступит на второй вход корректора 9
Корректор 9 выполняет две функции: формирует управляющий сигнал, поступающий на вход привода кронштейна 24, который обеспечивает постоянное расположение индукционной рамки 16 над кабелем 22 при повороте платформы экскаватора; корректирует значение Е „ при отклонении второго индукционного магнитоприемника 8 от номинального положения, т.е. такого положения, при котором он находится над кабелем 22. Эта корректировка необходима для устранения погрешностей при изменении Е, обус- ловленных отклонениями второго ИМ от номинального положения.
Сигнал с выхода датчика 31 угла поворота платформы экскаватора, пропорциональный этому углу, непрерыв- но поступает через исполнительный элемент 28 на вход блока 29 памяти, где и запоминается.
При приходе сиунала с выхода определителя 17-экстремума, на вход клю- чевого усилителя 28 происходит его срабатывание, отключение входа блока 29 памяти от выхода датчика 31 угла пой.орота платформы и подключение выхода датчика 31 угла поворота платформы через исполнительный элемент 32 к первому входу первого блока 33 вычитания, ко второму входу которого через исполнительный элемент 30 подключается выход блока 29 памяти.. .
На выходе первого блока вычитания находится нулевой по уровню сигнал, так как сигналы с выходов блоков 29 и 31 равны друг другу.
Далее при помощи коммутатора 10 устройство включается в режим Определение глубины, в результате чего отключается второй индукционный маг- нитоприемник 8 от входа определителя 17 экстремума и.подключается выход корректора 9 и выход сумматора 14 через коммутатор 10 к соответствующим входам делителя 11. Генератор 15 продолжает быть включенным.
Начинается прои:есс копания котлована.
При помощи датчика 1 угла отклонения и преобразователя 40 первого косинусного преобразователя 4 проис- ходит преобразование угла отклонения рукояти экскаватора от гравитационной вертикали (угла oi ) в напряжение пропорциональное косинусу этого угла которое подается на первый блок 41 умножения, на второй вход подается напряжение с первого выхода блока 3 ввода, пропорциональное расстоянию
L„. На выходе блока 41 умножения будет напряжение, пропорциональное произведению Lg-cosoi , которое поступает на вход инвертора 42, на выходе которого будет напряжение, пропорциональное произведению La cosoi , но с обра:тным знаком, т.е.
и
ин
-Ъ„ COScL .
O
s
0 5 Ь
Q
5
Одновременно при помощи датчика 2 угла отклонения ковша экскаватора от гравитационной вертикали и второго косинусного преобразователя 5 происходит вычисление произведения ( cos в), где В - угол отклонения ковша от гравитационной вертикали (угол, образованный гравитационной, вертикалью rt прямой, соедин5пощей точку поворота ковша с его режущей кромкой). Процесс вычисления этого произведения аналогичен процессу вычисления произведения (-L cos oL ). Отличие заключается в том что со второго выхода блока 3 ввода ггосто- янных на второй вход второго косинусного преобразователя,5 подается напряжение, пропорциональное величине L .
На первый вход решающего блока 6 поступает напряжение, пропорциональное (-Lg-cosd. ), на второй вход - напряжение, пропорциональное (-L:,
ч
COS в), а на третий вход решающего блока 6 с третьего выхода блока 3 ввода постоянных поступает напряжение, пропорциональное АН,.
Ток, протекающий по цепи: оболочка кабеля - земля, создает вокруг кабеля 22 магнитное поле, наводящее в первом и во втором индукционных магнитоприемниках (блоки 12 и 8) ЭДС, соответственно Е,- и Е.
Сигнал Е через фазовращатель 13, преДнЕзначенный для сдвига фаз между сигналами, поступающими с первого И второго индукционных магнитоприем- ников точно на 180°, поступает на второй вход сумматора 14. Сигнал Е с выхода второго индукционного магнитоприемника 8 поступает на первый вход корректора 9.
Так как нет отклонений второго индукционного магнитойриемника 8 от номинального положения (положения над кабелем), то на выходе корректора 9 будет сигнал E,-cos 0° Е„.
7
При отклонении втброго индукционного магнитоприемника 8 от номинального положения за счет поворота плат формы экскаватора на угол f , происходит корректировка значения Е следующим образом.
Напряжение с выхода датчика 31 угла поворота платформы экскаватора пропорциональное углу, поступает через исполнительный элемент 32 на вто рой вход первого блока, 33 вычитания, на второй вход которого с выхода бло ка 29 памяти через исполнительный элемент 30 подается напряжение, пропорциональное запомненному углу f ,
На выходе первого блока 33 вычитания появляется напяржение рассогла сования, пропорциональное разности ду у -1 , которое поступает на первый вход третьего блока вычитания 36, на второй вход которого поступает напряжение с первого выхода потенциометра 39, пропорциональное углу поворота платформы экскаватора в момент времени поступления сигнала с выхода определителя 17 экстремума, т.е. пропорциональное углу-у .
На выходе третьего блока 36 вычитания появится напряжение, пропорциональное разности 5С -1 подающееся на вход малооборотного двигателя 37, который через редуктор 38 приводит во вращение движок потенциометра 39. Вращение будет продолжаться до тех пор,, пока движок потенциометра 39 не повернется на угол д 1, в результате чего на выходе третьего блока 36 вычитания будет нулевое напряжение и двигатель прекратит вращение. На втором выходе потенциометра 39 будет сигнал, равный произведению Е cos д У , поступающий на первый вход сумматора 14 и через первый вход коммутатора 10 - на пер- определителя 11 отношения. Таким образом, осуществляется кор- ректировка сигнала Е при отклонении второго индукционного магнитоприемника 8 от номинального положения.
Напряжение, пропорциональное & у, поступает и на первый вход второго, блока 34 вычитания, на второй вход которого поступает напряжение с выхода датчика.35 угла поворота кронштейна 23, пропорциональное углу М/ (углу, образов анному продольной осью кронштейна 23 и ею же при таком положении кронштейна, когда его про- ,
589588
дольная ось в одной вертикальной плоскости с рабочим оборудованием экскаватора), при котором индукционная рамка 16 находится над кабелем 5 22. На выходе второго блока 34 вычитания будет сигнал рассогласования, поступаннций на привод кронштейна 24. Под действием этого сигнала будет происходить поворот кронштейна 23 10 относительно точки его крепления к платформе экскаватора на угол Ду . Таким образом, обеспечивается постоянное расположение индукционной рамки 16 над кабелем 22. 15 На выходе сумматора 14 будет сигнал, равный разности Е - Е (или скорректированный сигнал Е -E2CosЛJ), поступающий через второй вход коммутатора 10 на второй вход делителя 11,
20 на выходе которого будет напряжение, пропорциональное величине
и н г
+ г
Е,-Е
или при отклонении второго индукционного магнитоприемника 8 от номинального положения
и.Н-г Е,.совлу ,.cos4j.
и которое поступает на четвертый вход решающего блока 6.
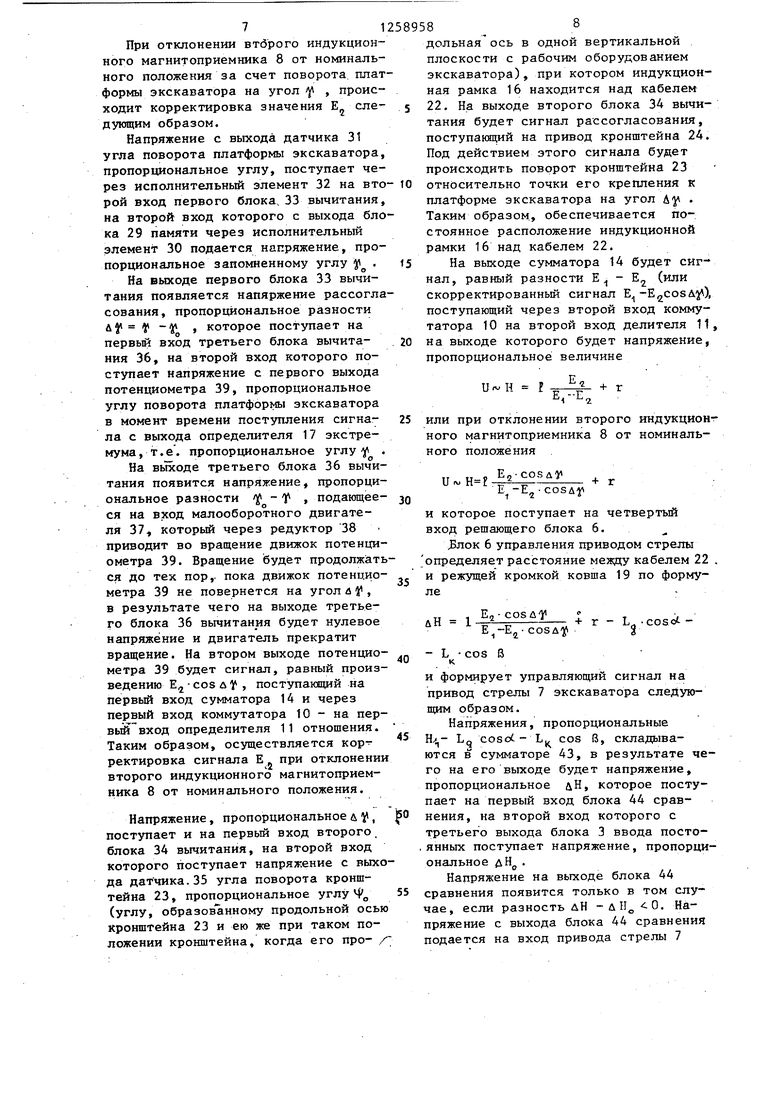
чБлок 6 управления приводом стрелы определяет расстояние мезкду кабелем 22 . и режущей кромкой ковша 19 по формуле
„ , Е,-cos л У , vi-ETE- o.
- L cos В к
и формирует управляющий сигнал на привод стрелы 7 экскаватора следующим образом.
Напряжения, пропорциональные
Lq cosct- L cos В, складываются в сумматоре 43, в результате чего на его выходе будет напряжение, пропорциональное дН, которое поступает на первый вход блока 44 сравнения, на второй вход которого с
третьего выхода блока 3 ввода посто- , янных поступает напряжение, пропорциональное дН .
Напряжение на выходе блока 44
сравнения появится только в том случае, если разность дН - д П, 0. Напряжение с выхода блока 44 сравнения подается на вход привода стрелы 7
91
экскаватора, который изменяет прост- ранетвенное положение стрелы экскаватора за счет ее поднятия. Поднятие стрелы.будет происходить до тех пор, пока напряжение на выходе блока 44 сравнения не станет равным нулю.
Таким образом, значение дН не становится меньше дН, и тем самым обеспечиваются сохранность подземной коммуникации и безопасность рабо такнцего на экскаваторе машиниста.
Формула изобретения
Устройство для автоматического регулирования положения ковша гидравлического экскаватора, содержащее индикатор, блок ввода постоянных, первый выход которого подключен к первому входу блока управления приво дом стрелы, датчик угла отклонения ковша и датчик угла отклонения рукояти, о тлич ающе е с я тем, что, с целью повышения надежное ти за счет обеспечения безопаснЬсти проведения земляных работ при нерав номерной глубине залегания подземных коммуникаций, устройство снабжено двумя косинусными преобразователями, корректором, фазовращателем, сумматором, коммутатором, определителем экстремума, генератором, делителем, индукционной рамкой и двумя индук/f/repBoi y
5895810
ционными магнитоприемниками, выход первого из которых подключен через фазовращатель к первому входу сумматора , выход которого подключен к
5 первому входу коммутатора, первый и второй выходы которого подключены к входам делителя, выход которого подключен к второму входу блока управления приводом .стрелы, выход второ10 го индукционного магнитоприемника подключен к первому входу корректора и к второ му входу коммутатора, выход корректора подключен к второму входу сумматора и к третьему вхоt5 ду коммутатора, третий выход которого подключен через генератор к индзгк- ционной рамке, четвертый выход коммутатора через определитель экстремума подключен к входу индикатора
20 и к второму входу корректора, а второй выход блока ввода постоянных подключен к первому входу первого косинусного преобразователя, к второму входу которого подключен датяик
25 угла отклонения рукояти, а выход подключен к третьему входу блока управления приводом стрелы, третий выход блока ввода постоянных подключен к первому входу второго ко30 синусного преобразователя, к второму входу которого подключен датчик угла отклонения ковша, а выход второго косинусного преобразователя -подключен к четвертому входу блока .управления приводом стрелы.
irffy. S/tofta to .
CBiitxaffa S/TOfftt
СВыжо а ffffffffctS CSbWffffa
fffOffO //
CSbtXffffoL ff O/fCfH
С и/жоЛу S/tffffa 3 срие.З
pus.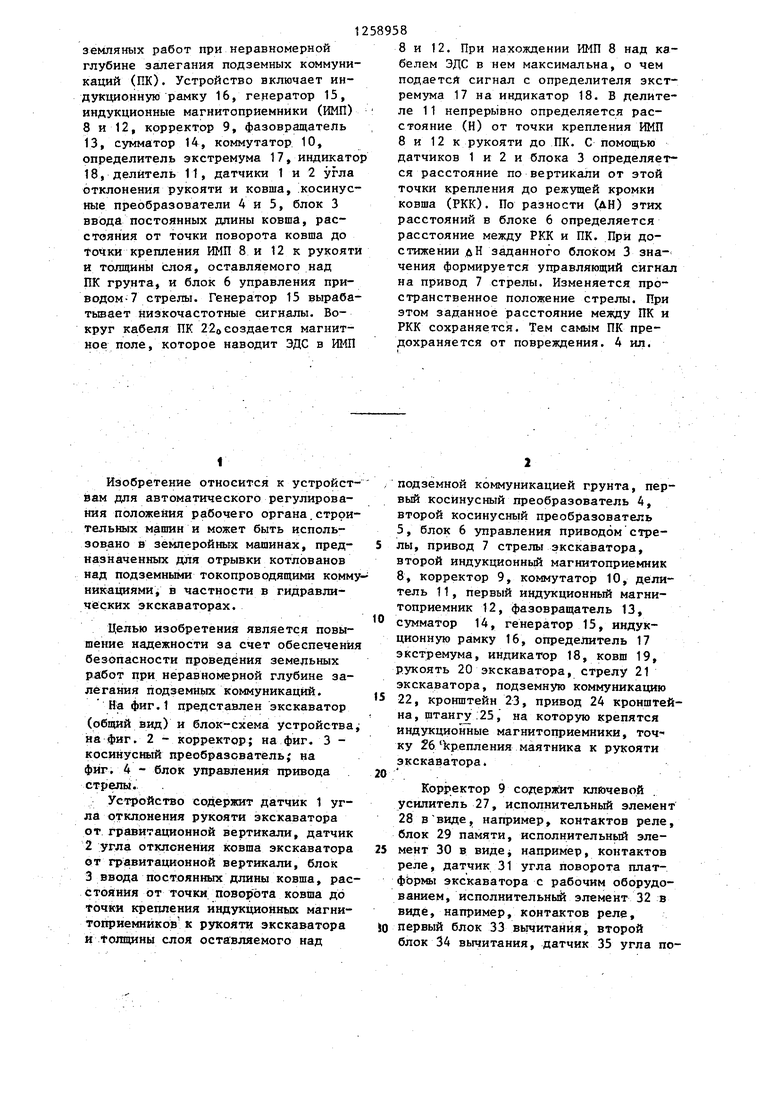
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1988 |
|
SU1587149A1 |
| Устройство для управления движением самоходного кабелеукладчика | 1986 |
|
SU1368861A1 |
| Устройство для управления движением тягового средства прицепного кабелеукладчика | 1985 |
|
SU1308989A1 |
| Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода | 2019 |
|
RU2743981C1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство для записи траекторий движения зубьев ковша одноковшового экскаватора | 1975 |
|
SU590408A1 |
| Система контроля расстояния между ковшом экскаватора и поверхностью стенки трубопровода и способ для его осуществления | 2019 |
|
RU2710233C1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Устройство для автоматического управления экскаватором | 1977 |
|
SU692950A1 |
Изобретение относится к автоматизации положения рабочего органа строительных и землеройных машин, предназначенных для отрывки котлованов над подземными токопроводящими коммуникациями. Цель изобретения - повьшение безопасности проведения (Л (О ел 00 со ел 00
| Патент США № 3817411, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| СПОСОБ МОДИФИЦИРОВАНИЯ ПРИРОДНЫХ СОРБЕНТОВ | 2016 |
|
RU2620809C1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
