I
Изобретение относится к землеройным машинам, в частности к роторным траншейным экскаваторам, применяемым при строительстве магистральных газонефтепроводов. -Известна землеройная машина, включающая исполнительный орган и механический копир для регулирования глубины отрываемой траншеи (IJ. Такая конструкция не позволяет регулировать глубину отрываемой траншеи при криволинейном очертании линии дна.
Наиболее близким к предлагаемому является роторный экскаватор, включающий тягач, ротор с ковшами, электрогидравлическую систему с фотоэлектрическим определителем и силовым цилиндром управления глубиной копания 2. Эта конструкция не позволяет автоматически управлять глубиной отрываемой транщеи в Случае наличия искривлений транщеи в горизонтальной и вертикальной плоскостях. ,
Целью изобретения является автоматическое управление глубиной отрываемой траншеи.
Цель достигается тем, что электрогидравлическая система соединена со штоком гидравлического цилиндра по мостовой схеме, связанной с фотоэлектрическим определителем, и снабжена, лентой с информацией о линиях дна транщеи и поверхности земли, взаимодействующей с фотоэлектрическим определителем и ходовой частью экскаватора.
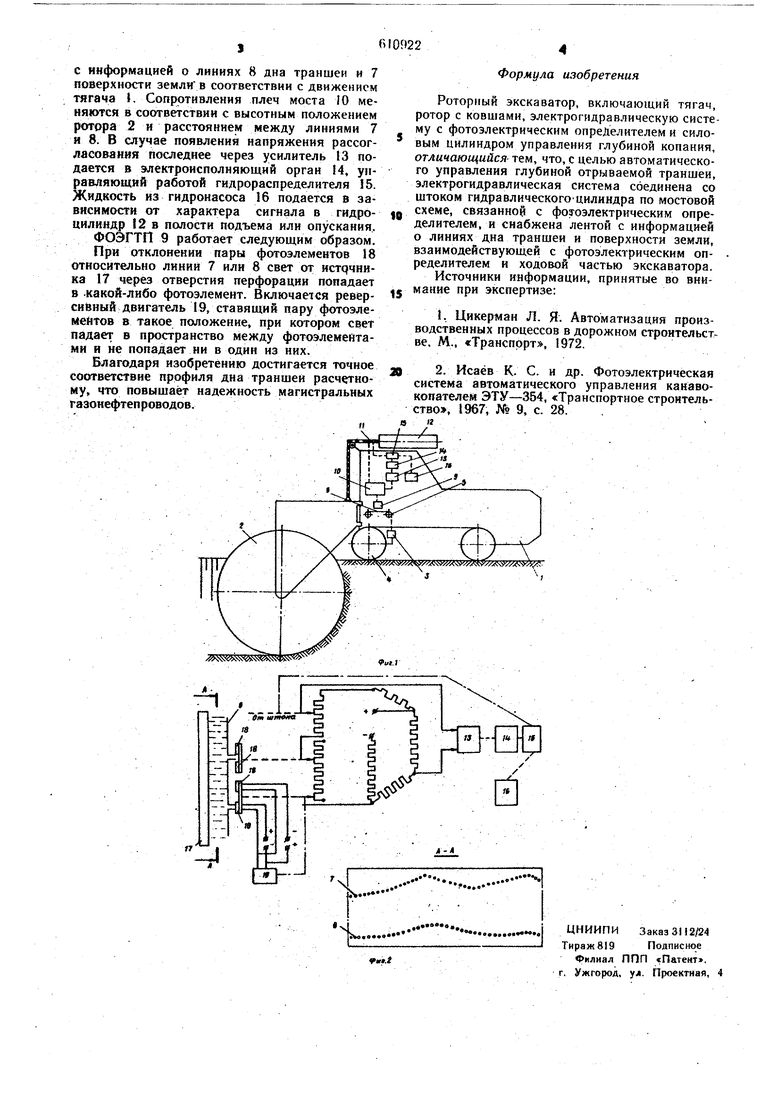
На фиг. 1 показан предлагаемый экскаватор, вид сбоку; на фиг. 2 - фотоэлектрический определитель глубины траншей с гидроисполняющей системой.
К тягачу I прикреплен ротор 2 с ковшами. Через редуктор 3 ведущее колесо 4 соединено с роликом 5, на который намотана лента 6. На ленту Нанесены линия 7 (см. фиг. 2), соответствующая поверхности земли, и линия 8, соответствующая линии дна траншеи.
Фотоэлектрический определитель глубины траншеи по проекту (ФЭОГТП) 9 (см. фиг. 1) соединен с мостом 10, имеющим связь со штоком 11 гидроцилиндра 12 управления глуби-ной копания. Мост 10 через усилитель 13 соединен с электроисполняющей системой 14 релейного типа, управляющей работой гидрораспределителя 15, направляющего жидкость, подаваемую из насоса 16 (см. фиг. 2), в полости цилиндра управления глубиной копания. В ФОЭГТП вклк)чены источник света 17, фотоэлементы 18 и реверсивные двигатели 19. Роторный экскаватор работает следующим образом.
Движение экскаватора через редуктор 3 передаегся ролику 5. Ролик перемешает ленту 6
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления приводом рабочего оборудования экскаватора | 1974 |
|
SU592936A1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1993 |
|
RU2035550C1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 1990 |
|
RU2029828C1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| РАБОЧИЙ ОРГАН РОТОРНОГО ТРАНШЕЙНОГО ЭКСКАВАТОРА | 2010 |
|
RU2421575C1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1992 |
|
RU2034961C1 |
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |
| Рабочий орган траншеекопателя | 1983 |
|
SU1097761A1 |
| Рабочее оборудование роторного экскаватора | 1976 |
|
SU610924A1 |
