1
Изобретение относится к области приборостроения, в частности, к устройствам для измерения давления.
Известны.преобразователи давления с время-импульсным выходным сигналом, использующие весовой опорный элемент в сочетании с неуплотненным поршнем, построенные по методу двухтактного интегрирования давления у..
Известные преобразователи давления не обеспечивают высокой точности измерения.
Наиболее близким к изобретению по технической сущности является преобразователь давления, который состоит из заполненной рабочей жидкостью камеры, соединенной с измеряемой средой через нерегулируемый дроссель, и неуплотненного поршня, вывешенного поплавком и размещенного во вращающейся втулке. Над поршнем размеш.ен электрмагнит, сердечник которого использован в качестве опорного груза, а обмотка подключена к блоку управления. Крайние положения поршня фиксируются подключенными к блоку управления датчиками положения - контактами. Прямой ход поршня на заданное перемешение осуществляется усилием от измеряемого давления, а обратный - за счет стабильного веса сердечника электромагнита. ,
В этом преобразователе давления неуплотненный поршень одновременно выполняет функции источника образцового давления в совокупности с весовым опорным элементом, интегрирующего устройства в совокупности с нерегулируемым дросселем и указателя выходного сигнала интегратора объема протекающей жидкости, чтоосуществляется датчиками положения по перемещению поршня 2, .
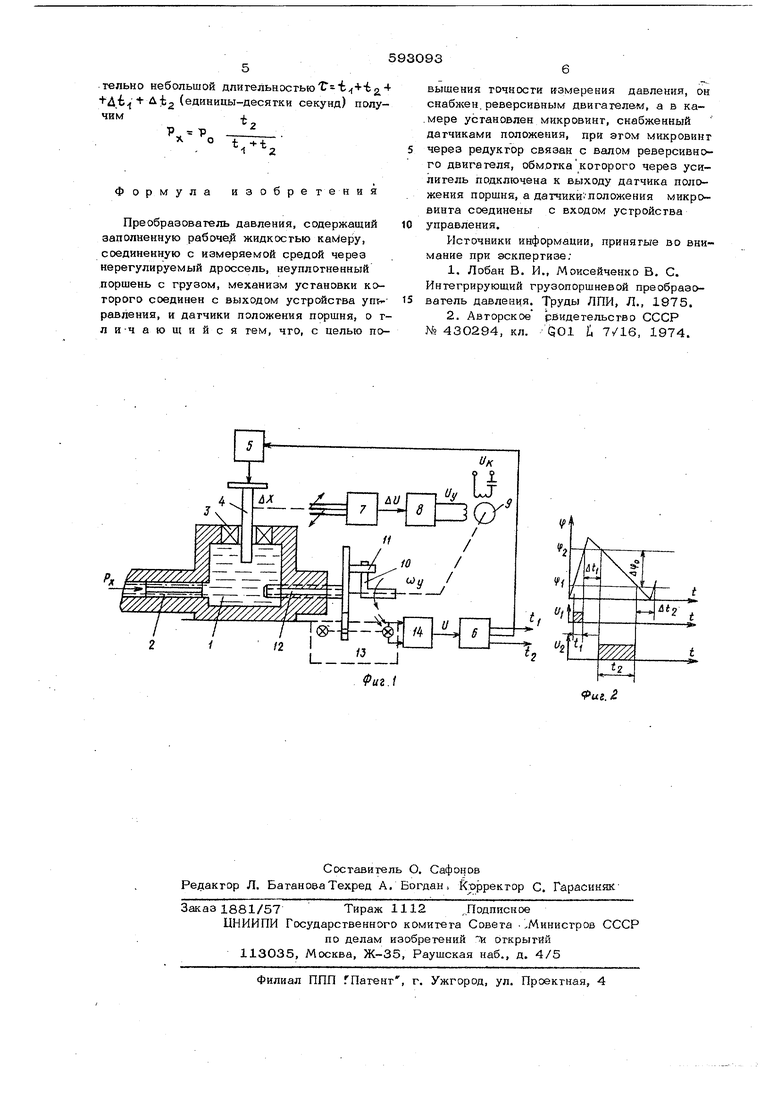
Такое совмещение функций упрощает конструкцию преобразователя, но ограничивает точность из 1ерения, так как привоит к следующему противоречию: с одной стороны, для повышения точности задания образцового давления, а также точности интегрирования давления необходимо стремиться к уменьшению перемещения поршня (в точных датчиках давления, в частности эталоне давления, допустимые перемещения поршня ограничиваются долями микрона), а другой стороны, для уменьшения погрешносги сравнения интегралов и выявления измерительных интервалов времени следует увеличивать, перемещения поршня, так как чувствительность датчиков положения ограничена, §i также большое влияние оказываю помехи, в частности вибрации при малых перемещениях, Целью настоящего изобретения является повь1шение точности измерения давления. Это достигается тем, что предлагаемый преобразователь давления, содержащий запо ненную рабочей жидкостью камеру, соедине ную с измеряемой средой через нерегулируемый дроссель, неуплотненный поршень с грузом, механизм установки которого сое дивен с выходом устройства управления, и датчики положения поршня, снабжен ревер сивным двигателем, а в камере установлен микровинт, снабженный датчиками положения, при этом микровинт через редуктор связан с валом реверсивного двигателя, обмотка которого через усилитель подключена IK. выходу датчика положения порщня, а датчики положения микровинта соединены с входом устройства управления. На фиг. 1 схематически показан описываемый преобразователь; на фиг. 2 - диаграмма его работы. Преобразователь содержит камеру 1 с жидкостью, которая через нерегулируемый дроссель 2 соединена с измеряемым давлением Р-) , вращающуюся втулку 3, неуплот ненный поршень 4, механизм 5 наложения груза, управляемый сигналами с выхода устройства управления 6. Перемещение поршня измеряется датчиком 7 положения, например, емкостным, а выходной электри ческий сигнал датчика усиливается усилителем 8, выход которого подключен к обмотке управления реверсивного двигателя 9. Вал двигателя через редуктор посредством лапки 1О и пальцев 11 связан с микровинтом 12, размещенным в камере 1. Сравнение заданных в двух тактах значений интегралов- дискриминация угла Ч поворота микровинта осуществляется фотодатчиком 1 сигнал которого через усилитель 14 посту пает на устройство управления 6. Устройство управления формирует импульсы t и t 2 длительность которых равна времени вращения микровинта на заданный угол первом и втором тактах интегрирования,. Преобразователь работает следующим образом. В исходном состоянии поршень заарретирован. При снятии арретира по сигналу с устройства управления 6 в первом такте интегрирования жидкость под действием измеряемого давления натекает в камеру 1 через дроссель 2 с гидравлическим сопротивлением R (: и стремится вытеснить пор-шень 4 вверх. Перемещение поршня преобразуется датчиком 7 в напряжение, которое усиливается усилителем 8 и прикладывается к обмотке управления реверсивного двигателя 9. При псяожительном управляющем напряжении двигатель вращается в направлении вывинчивания микроаинта, и через некоторое время задержки д€ , его скорос.ть вращения Шд- устанавливается постоянной. При этом угол Ч П1жората вала растет: К где К - коэффициент передачи замкнутой цепи следящего астатическогЪ уравновещивания (узлы 3,7,8,9,12), преобразующей расход Gl и угловую скорость (ttg . УГОЛ д«Сд задан двумя уровнями дискриминации f и и практически его удобно сделать равным одному (нескольким) оборотам вала. Таким образом, в течение времени i , когда микровинт поворачивается на угол ДФо от f до На осуществляется первый такт интегрирования, и формула измерения имеет вид л.„.|Ха. . Во втором такте по сигналу с устройст ва управления в течение задержки At 2 осуществляется наложение груза весом . где 5 - эффективна площадь поршня. Поршень стремится опуститься, а жидкость вытечь из камеры через дроссель с расходом под действием разности давлений Pj, г( Расход Qy - - ; через время задержки Ai,j Отслеживается цепью следящего астатическо;го уравновешивания. Так как во 2-м такте поршень перемещается в обратном направлении, напряжение на выходе датчика.7 положения и на выходе реверсивного двигатеЛя9 изменяв знак, и вал двигателя начинает изменяет знак, и вал двигателя начинает ращаться в обратном направлении, проходя заданные значения угла f,, « f-f в обратом направлении, при этом устройство правления 6 сформирует измерительный нтервал tg .Во втором такте формуа измерения имеет вид: учетом равенства значений -интегралов обоих тактах интегрирования ® гак-; е при условии постоянства гидравлическо-. о сопротивления к и коэффициента переачи К в течение цикла измерения сравни.тельно небольшой ипитепьностьюС-Ь -Ь АЬ 2 (единицы-десятки секунд) получим
3 обре тени я
Ф о р м у л
Преобразователь давления, содержащий заполненную рабоче жидкостью камеру, соединенную с измеряемой средой через нерегулируемый дроссель, неуплотненный поршень с грузом, механизм установки которого соединен с выходом устройства упь-равления, н датчики положения поршня, о тлн-чающийся тем, что, с целью повышения точности измерения давления, он снабжен, реверсивным двигателем, а в ка.мере установлен микровинт, снабженный датчиками положения, при этом микровинт через редуктор связан с валом реверсивного двигателя, обмоткакоторого через усилитель подключена к выходу датчика положения поршня, а дагчикилоложения микровинта соединены с входом устройства управления.
Источники информации, принятые во внимание при эскпертизе;
1.Лобан В. И., Моисейченко В. С. Интегрирующий грузопоршневой преобрааователь давления. Труды ЛПИ, Л., 1875.
2.Авторское рвидетельство СССР № 430294, кл. QO1 L 7/16, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь давления с времяимпульным выходным сигналом | 1972 |
|
SU447589A1 |
| ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ С ВРЕМЯ-ИМПУЛЬСНЫМ ВЫХОДНЫМ СИГНАЛОМ | 1974 |
|
SU430294A1 |
| Манометр | 1976 |
|
SU657285A1 |
| Преобразователь давления с времяимпульсным выходным сигналом | 1971 |
|
SU446782A2 |
| Устройство для оценки зазоров в кривошипно-шатунном механизме поршневой машины | 1982 |
|
SU1118885A1 |
| Манометр | 1976 |
|
SU555304A1 |
| Грузопоршневой манометр | 1981 |
|
SU974165A1 |
| БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2012 |
|
RU2521446C1 |
| Грузопоршневой манометр | 1984 |
|
SU1170296A1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2490203C2 |
