1
Изобретение относится к технике проведения погрузочно-разгрузочных, монтажных, ремонтных и т.п. работ, вьтолняемых преимущественно мобильными подъемно-транспортными агрегатами ограниченной грузоподъемности.
Известен грузоподъемный кран, установленный на транспортном средстве, содержащий основание, на котором с помощью шарч ров смонтированы три гидроцйлиндра, што кй которых соединены между собой и с грузозахватным органом.
Однако для обеспечения заданной высоты подъема груза кран должен иметь отдельный механизм вертикального подъема (опускания) груза, а это ограничивает сферу применения крана и приводит к пони кению жесткости конструкции.
Для расширения зоны действия крана и повышения жесткости конструкции, предлагаемый кран снабжен дополнительным цилиндром,, размещенным на основании, выполненным в виде плоской треугольной фермы, одн сторона которой закреплена на транспортном
средстве с возможностью поворота в вертикальной плоскости.
Кроме того, для обеспечения монтажа крана на транспортном средстве, кран снабжен подвижными упорами, ограничиваюшими поперечный наклон основания.
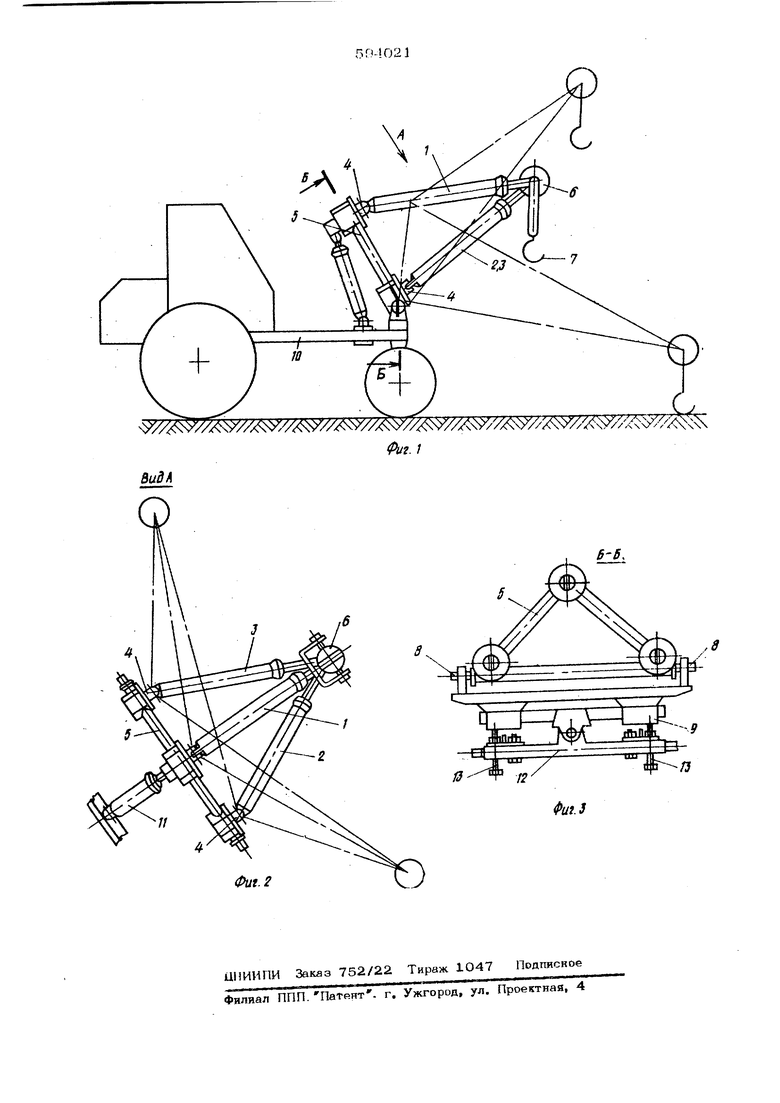
На фиг. 1 изображен предлагаемый кран, общий вид; на фиг. 2 показан вид по стрелке А на фиг. 1; на фиг. 3 дано сечение Б-Б на фиг. 1.
Основу рабочего оборудования грузоподъеного крана составляюттри гидравлических силовых цилиндра 1, 2 и 3. Корпуса этих цилиндров с помощью шарниров 4, имеющих две степени свободы, закреплены на основании 5. Противоположные концы (штоки) всех трех пилиндров сведены вместе при помощи особого шарнира 6, несущего функции головной траверсы, к которой присоединен также грузозахватный орган 7.
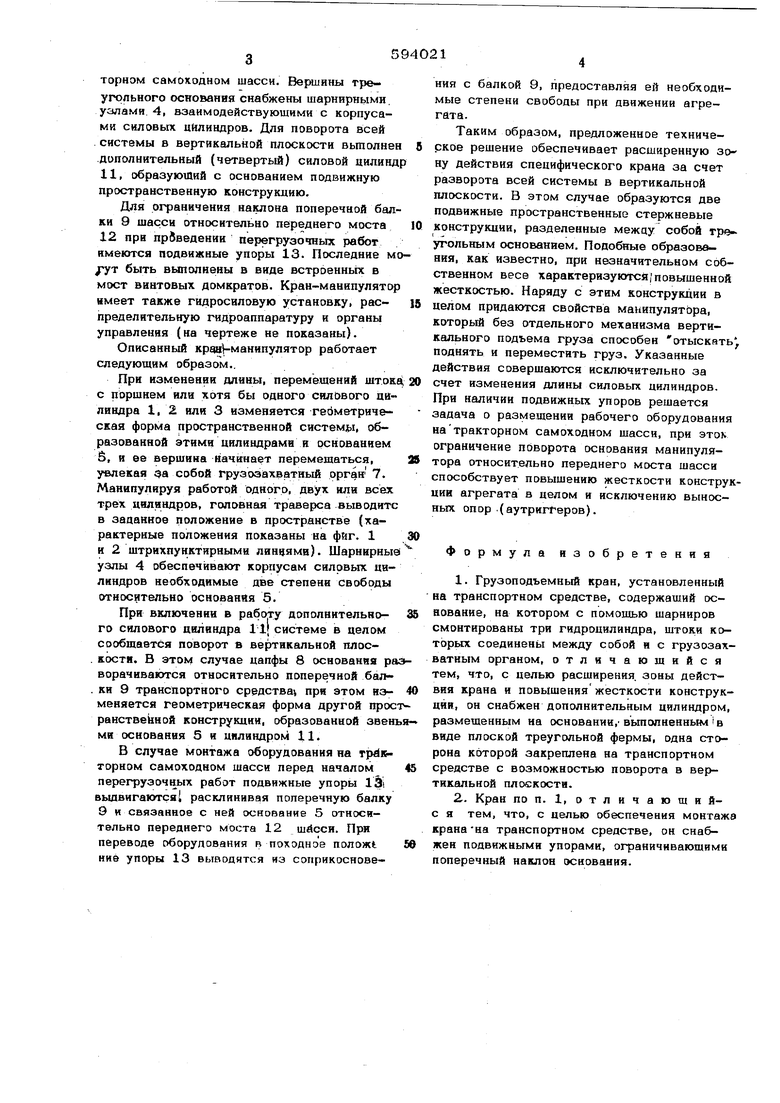
Основание 5 выполнено в виде плоской треугольной: фермы (см, фиг. 3). Одна сторона этой фермы содержит цапфы 8, смонтированные на поперечной балке 9 рамы Ю транспортного средства, например на тракторном самокодном шасси, ЕЗершины треугольного основания снабжены шарнирными уапами. 4, взаимодействующими с корпусами силовых цилиндров. Для поворота всей системы в вертикальной плоскости вьтолнен дополнительный (четвертый) силовой цилиндр 11, образующий с основанием подвижную пространственную конструкцию.
Для ограничения наклона поперечной балки 9 шасси относительно переднего моста 12 при приведении перегрузочных работ имеются подвижные упоры 13. Последние моfy быть выполнены в виде встроенньгх в мост винтовых домкратов. Кран-манипулятор имеет также гидросиловую установку, распределительную гидроаппаратуру и органы управления (на чертеже не показаны).
Описанный крадЬманипулятор работает следующим образом..
При изменении длины, перемещений штока с поршнем или хотя бы одного сил&вого цилиндра 1,2 или 3 изменяется геЬметрическая форма пространственной систем, образованной этими цилиндрами и основанием в, и ее вершина начинает перемешаться,
увлекая 0а собой грузозахватный орган- 7. Манипулируя работой одного, двух или всех трех цилиндров, головная траверса выводите в заданное положение в пространстве (характерные положения показаны на фиг. 1 и 2 штрихпунктирными линиями). Шарнирные узлы 4 обеспечивают корпусам силовых цилиндров необходимые две степени свободы относительно основания 5.
При включении в работу дополнительного силового цилиндра 11 системе в целом сообщается поворот в вертикальной плос. костя. В этом случае цапфы 8 основания ptiворачиваются относительно поперечной бал. ки 9 транспортного средства при этом изменяется геометрическая форма другой просранствеЬной конструкции, образованной звень ми основания 5 и цилиндром 11.
В случае монтажа оборудования на тр &торном самоходном шасси перед началом перегрузочных работ подвижные упоры 1Э вьщвигаются расклинивая поперечную балку 9 и связанное с ней основание 5 относительно переднего моста 12 шйсси. При переводе оборудования в походное пoлoжt НИ9 упоры 13 выводятся из соприкосновения с балкой 9, предоставляя ей необходимые степени свободы при движении агрегата.
Таким образом, предложенное техническое решение обеспечивает расширенную зону действия специфического крана за счет разворота всей системы в вертикальной плоскости. В этом случае образуются две подвижные пространственныо стержневые конструкции, разделенные между собой треугольным основанием. Подобные образования, как известно, при незначительном собственном весе характеризуются/повышенной жесткостью. Наряду с этим конструкции в целом придаются свойства манипулятора, который без отдельного механизма вертикального подъема груза способен отыскать поднять и переместить груз. Указанные действия совершаются исключительно за счет изменения длины силовых цилиндров. При наличии подвижных упоров решается задача о размещении рабочего оборудования натракторном самоходном шасси, при эток ограничение поворота основания манипулятора относительно переднего моста шасси способствует повышению жесткости конструкции агрегата в целом и исключению выносных опор .(аутриггеров).
Формула изобретения
1.Грузоподъемный кран, установленный на транспортном средстве, содержащий основание, на котором с помощью шарниров смонтированы три гидроцилиндра, щток.и которых соединены между собой и с грузозахватным органом, отличающийся тем, что, с целью расширения, зоны действия крана и повышения жесткости конструкции, он снабжен дополнительным цилиндром, размещенным на основании,выполненным IB виде плоской треугольной фермы, одна сторона которой закреплена на транспортном средстве с возможностью поворота в вертикальной плоскости.
2.Кран по п. 1, отличающийс я тем, что, с целью обеспечения монтаж кранана транспортном средстве, он снабжен подвижными упорами, ограничивающими поперечный наклон основания. , 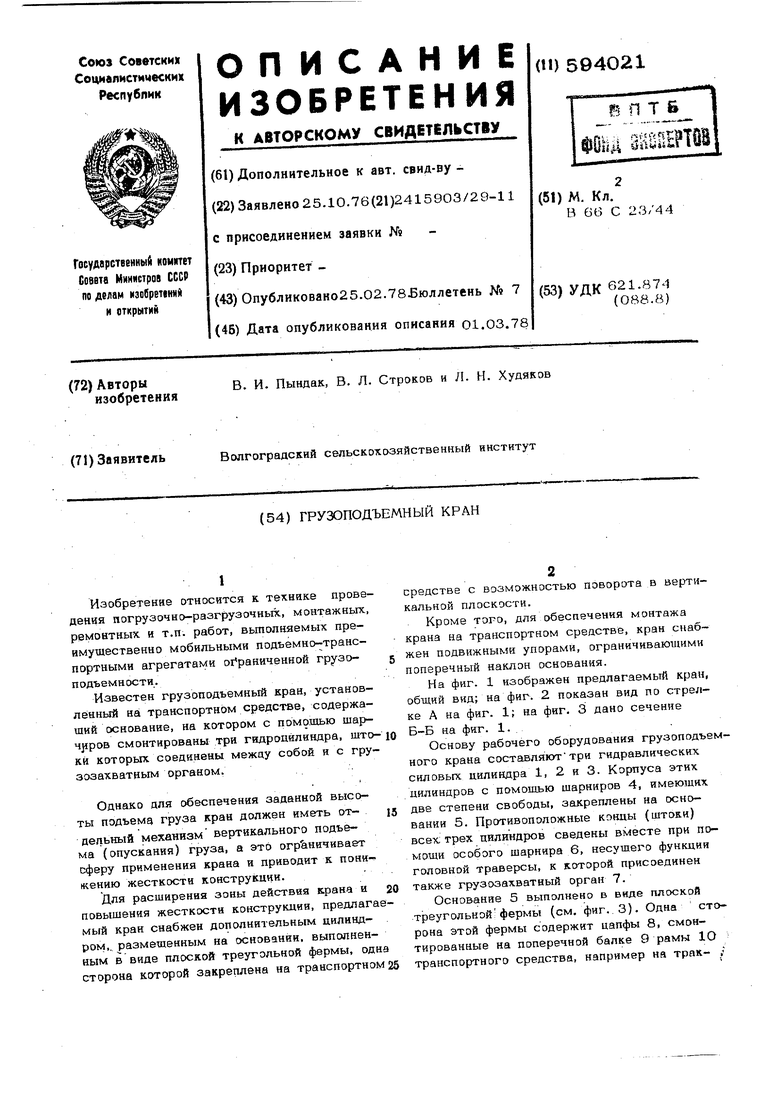
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2207317C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |
| Кран-манипулятор | 2019 |
|
RU2722762C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |