Предлагаемый вибрационный горизонтальный грохот относится к типу грохотов с эксцентриковогрузовым приводом н пружинными опорами.
Он представляет собой усовершенствованн ш полувибрационный уравновешенный грохот, работающий с изменяемыми в широких пределах параметрами механического режима: числом оборотов, амплитудой и углом наклона.
Грохот может быть установлен как горизонтально, так и с положительным и отрицательным наклоном; форма траектории колебаний его может быть заранее задана либо в виде прямой линии, либо в виде эллиптической, круговой или более сложной кривой.
В основном грохот работает с горизонтальным расположением, совершая колебания, близкие к прямолинейным; число оборотов и величина полного хода (двойная амплитуда) устанавливаются в каждом данном случае по условиям оптимального режима грохочения.
Грохот предназначается для рассева руд и других сыпучих материалов так же, как все прочие известные в настоящее время вибрационные и другие быстроходные грохота. При надлежащей регулировке он может быть использован для сит с любыми размералп-1 отверстий, начиная от самых крупных и кончая мелкими ситами, применяемыми для тонкого грохочения порошковатых и пылевидных материалов.
Грохот работает по принципу вибрационных грохотов с caMo6ajiaHCHb Nr г/риводол инерционного действия.
Однако, в отличие от известных устройств подобного рода, балансирный груз, помещенный на конце эксцентриковой тяги, подвешен в свою очередь на пружинной тяге в станине грохота, и кроме того имеется второй груз, жестко укрепленный на валу эксцентрика, который служит для уравновешивания массы последнего.
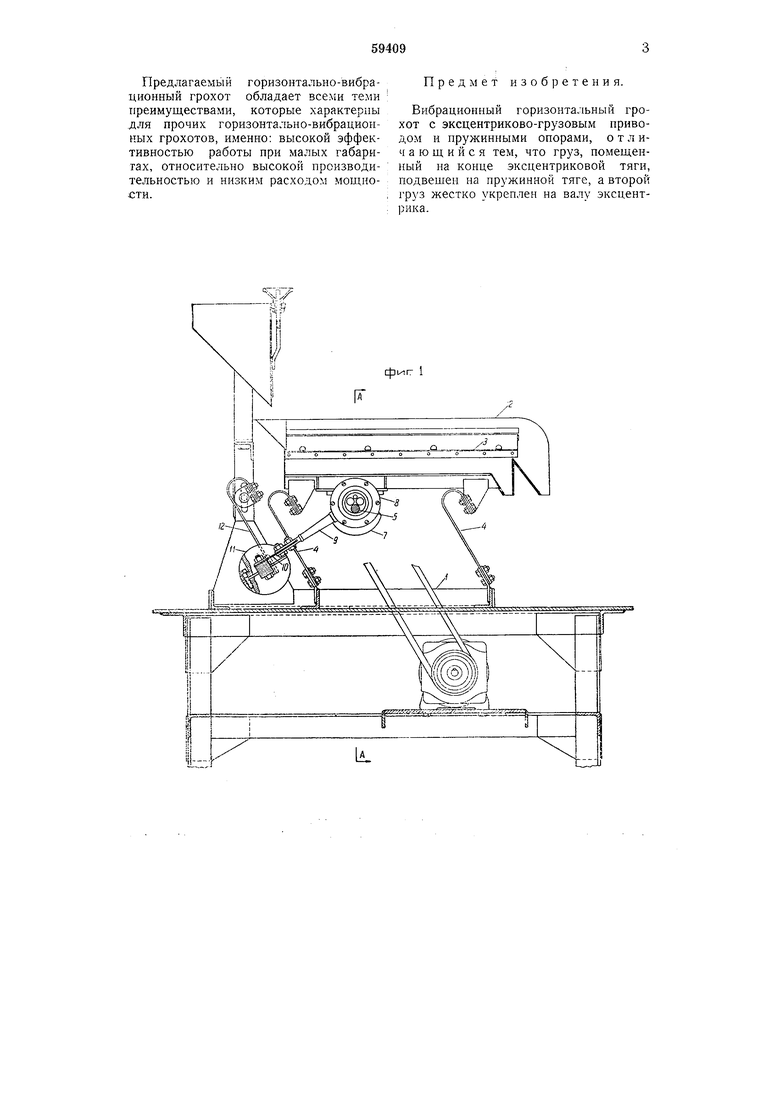
На чертеже фиг. 1 показывает общий вид грохота сбоку и фиг. 2 - разрез по А-А фиг. 1.
Грохот состоит из неподвижной рамы 1, подвижного корпуса 2, системы опор и приводного вибратора.
Подвижной корпус 2, представляющий собою жолоб с укрепленным в нем рабочим органом, т. е. решетом или ситом 3, опирается на пружинные опоры 4 криволинейной формы, закрепляе.мые нижними концами на неподвижной раме 1 и дающие корпусу 2 две степени свободы движения: вдоль и
перпендикулярно плоскости рабочего органа. Направление и форма результирующих колебаний корпуса зависят от направления и величины действующих сил.
Корпус приводится в движение вибратором специальной конструкции. Механизм вибратора состоит из приводного эксцентрикового илн кривошипного вала 5, подшипники 6 которого монтируются на подвижном корпусе 2, эксцентрика 5а, малых секторных комЦёйсационных грузов 7, сидящих на валу 5, эксцентриковой обоймы 8 с тягой 9, закапчивающейся гибкой пластиной 10, и больших вторых грузов 11 (контргрузов), подвешенных на криволинейных пружинных тягах 12 и связанных с гибкой пластиной 10 эксцентриковой тяги.
На приводном валу 5 имеется шкив 13 для ременной или клиноременной передачи от электродвигателя.
Опоры 4 и 12 могут быть заменены пружинными подвесками; при этом описанный грохот стоячего типа может быть превращен в подвесной.
Грохот может быть использован также в качестве питателя, если сито залменить гладким листом.
Действие грохота происходит следующим образом.
При вращении рабочего вала 5 центр пийбы эксцентрика 5а (или пальца кривошипа) описывает кривую, близкую к окружности, а противоположный валу конец эксцентриковой тяги 9 вместе с прикрепленным к ней контргрузом 1Г совершает колебания по траектории, близкой к эллипсу, большая ось которого совпадает с направлением линии мертвь1х точек кривошипа. Положение рабочего вала подбирается таким, чтобы линия мертвых точек проходила через центр тяжести тюдвижного корпуса 2 грохота.
Контргрузы 11 с одной стороны и подвижной корпус 2 грохота с другой представляют собою две свободно подвешенные массы с принудительно изменяющимся взаимным расстоянием их центров тяжести. При расположении кривошипа в левой мертвой точке расстояние это буде г максимальным и, наоборот, правая мертвая точка кривошипа будет соответствовать минимальному расстоянию между центрами тяжести масс. Разность между наибольшим и наименьшим расстоянием представляет собою полный путь относительного перемещения масс и равна двойному эксцентриситету. Она распределяется по закону количества движения, т. е. приблизительно обратно пропорционально движущимся массам.
Таким образом, предлагаемое устройство позволяет с помощью небольших грузов 11, совершающих колебания с большой амплитудой, приводить в колебательное движение корпус грохота 2 значительно большей массы с небольшими амплитудами, требующимися для нормальной работы вибрационного грохота.
В целях компенсации эксцентричной массы самой вращающейся шайбы эксцёнтрика 5й (или кривошипа), на вал 5, как уже упоминалось, насажены добавочные малые секторные грузы 7. Регулировкой их веса достигается то или иное изменение формы траектории грохота. С помощью компенсационных грззов 7 траектория превращается из прямолинейной в эллиптическую или более сложную (петлеобразная кривая) и наоборот.
Основной контргруз 11 набирается из отдельных свертных шайб; с увеличением или уменьшением их количества соответственно повышается или уменьшается амплитуда колебаний грохота.
Угол наклона оси эксцентриковой тяги 9 может быть изменен путем подъема или опускания точки закрепления пружинных тяг 12. Соответственно этому изменяется и угол наклона оси прямолинейных колебаний ПО отношению к плоскости сита. Для каждого данного технологического режима отыскивается оптимальное положение шатуна.
Изменение числа оборотов достигается сменными приводными шкивами.
Наконец, в случае необходимости излгенить горизонтальное расположение на наклонное, основная рама 1 грохота поворачивается на тот или иной угол.
Таким образом, грохот характеризуется возможностью широкой регулировки решительно всех параметров механического режима.
npeAviaraeMbiH горизонтально-вибрационный грохот обладает всеми теми преимуществами, которые характерны для прочих горизонтально-вибрационных грохотов, именно: высокой эффективностью работы при малых габаритах, относительно высокой производительностью и низким расходом мощности.
Предмет изобретения.
Вибрационный горизонтальный грохот с эксцентрикоБО-грузовым приводом и пружинными опорами, отличающийся тем, что груз, помещенный на конце эксцентриковой тяги, подвешен на пружинной тяге, а второй груз жестко укреплен на валу эксцентрика.

| название | год | авторы | номер документа |
|---|---|---|---|
| ГРОХОТ ИНЕРЦИОННЫЙ С ОДНИМ ВАЛОМ | 2021 |
|
RU2788948C1 |
| Способ грохочения сыпучих материалов на взаимно перемещающихся колосниках | 1985 |
|
SU1265001A1 |
| ГРОХОТ | 2002 |
|
RU2232651C1 |
| РОЛЬГАНГ КАЧАЮЩИЙСЯ | 2001 |
|
RU2212293C2 |
| КРИВОШИП С ПЕРЕМЕННЫМ РАДИУСОМ | 2000 |
|
RU2185897C2 |
| ГРОХОТ ГИРАЦИОННЫЙ | 2000 |
|
RU2165312C2 |
| ПНЕВМАТИЧЕСКИЙ СОРТИРОВАЛЬНЫЙ СТОЛ | 1972 |
|
SU327944A1 |
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| ВИБРОСИТО | 2023 |
|
RU2814446C1 |
| ВИБРАЦИОННЫЙ ГРОХОТ | 2008 |
|
RU2458747C2 |

фис 2
