1
Изобретение относится к ооласти мехапизации перемещения грузов по направляющим транспортных систем и может быть использовано в цехах и складах различных отраслей промышленности.
Известен толкаюхщ й конвейер, включающий направляющие, штангу с толкателями и привод ij .
Недостаток такого конвейера - невозможность маневрирования грузами.
Наиболее близким техьгическим решением к описываемому изобретению является конвейер, включающий направляющие, штангу, толкатель с опорной поверхностью и привод 2.
Недостатки указанного конвейера - невозможность остановки груза на любом участке транспортной системЫ) а также невозможность перемещения грузов по взаимопротивоположлым направлениям и. по заданнок1у режиму.
Целью изобретения является обеспечение возмох ности перемещения грузов по изменяющейся программе, направлению и режиму движения. Это достигается тем,
что толкатель выполнен с опорными поверх)1эстями, а на штанге размещены упоры с электромагнитными переключателями, причем упоры установлены с воэ можностью перемещения в горизонтальной плоскости и взаимодействия с опорныкш поверхностями толкателя.
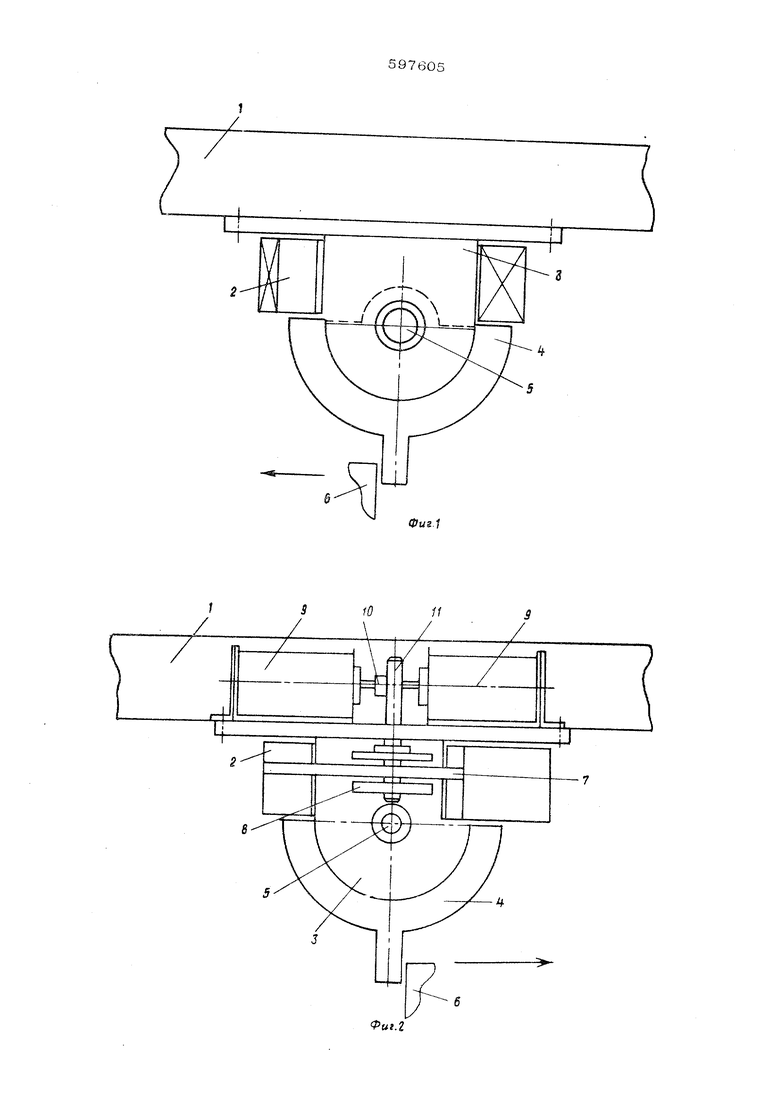
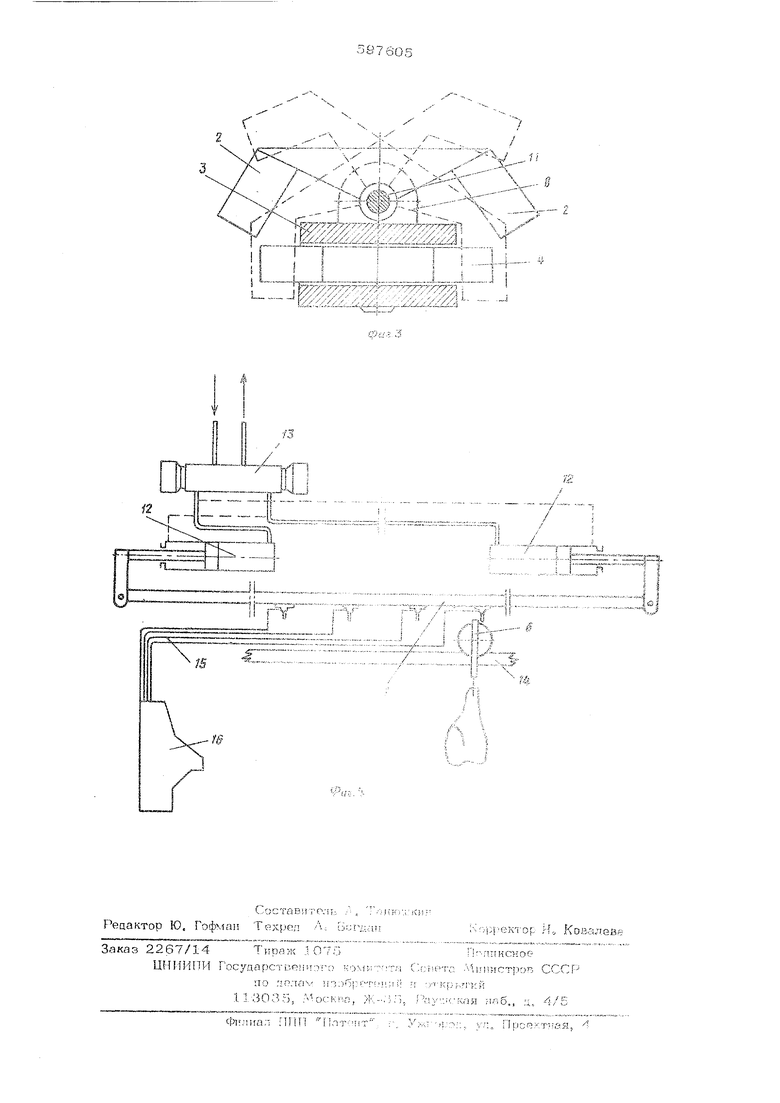
На фиг. 1 и 2 схематически изображен участок штанги толкающего конвейера с толкателем; на фиг. 3 - механизм управления работай толкающего пальца; на фиг. 4 - общий вид толкающего конвейера.
Толкающий конвейер состоит из щтанги 1, упоров 2, шарнирно закрепленных на корпусе толкателя 3, двуплечего пальца 4, шарнирно закрепленного на корпусе толкателя при помощи оси 5, упора грузовой каретки 6, коромысла 7, крони1тейнэв 8, На которых монтируется механизм упоров, элeктpэ aгнитoв 9, соединенных тягами через флажок 10 с осью 11 N-iexamoMa упоров, гидрэцилиндров 12, подключенных к гидросистеме зэлэтник 13, пути 14, из KDTOpoNry перемещается каретка с rpysjxi, и электроприводов 15, подключаюu,HX толкатели к прэграмкпюму к х r-v yrsipiiomeNfy устройству 1G.
Коньейер раб: тает следу;o j;;t:-i ::;SpiJ3;jN;,
Штанга 1 1юя Еоаяействнсм лэршнай гвдроцилиндров .12 cDEfcpiiiaeT и направ;:я;с uuix иозвратно-п: сту1 ательное двТЖенче, которое передается упору грузивой «..MijyT-ки 6 через корпус толкателя 3 а палеи 1. В режиме рабочего хода палец --Ij закроп- ленный шарннрно на корпусе толкатели- . при оси 5, удерживается DT арэи;.)рачиваиия одним из упоров 2 Палец 4, воздействуя на упор грузовой кареткл; С-., пepe ieщaeт груз на один шаг,
Fi режикге холостого хода 1ита)га .1 совершает движение в обратную сторанл, i -pu этом палец 4. при встрече с упором i rjy;io-. вой каретки 6 поворачивается на неиот-о-рый угол, а упор 2, вывеценнь й из заце-пления с этой CTOpoHbi, ироггускает груз. При очередном рабочем ходе груз зихг.атьшается пальпем 4 н перемещается ;ja один шаг. Штанга 1 снабжена болыии ; кэличеством толкаюгцугх пальцев, кото)ые расположены на расстоя1Гг1и, меньшем рабочего хода 11танги на рзеличину. необкол ;мую для того, чтобьг палец в режиг-ле лостого хода пропускал упор грузовой керетки, а в режиме рабочего хода вход;-:. :.: ним в зацепление.
При необходимости изгленения напра.вле-;-ьшя движегшя груза упорь 2 меняются рг).лями. Первый упор уходит с упорной позиции, а второй становится на упорн7/ю пззицию так, чтобы палец 4 другим плечо мог опираться с помощью упора 2 на кар пус толкателя 3, закрепленный на и-тб.нге, Если оба упора 2 стоат в нейтральнот.л положении, груз не перемещается, так как толкающий палец 4 свободно проворачква-ется в обоих направлениях и не может войти в зацепление с упором грузовой к.лретки 6.
Для дистанционного управления л -р ;мещеннем грузов на конвейерной лти-гигг толкатель 3 снабжен толкающим пальцем 4 с: двумя опорными плечами Палец 4 свободно поворачивается на оси 3, при иэмощи которой он крепится на корпусе ).;::кателя 3,
Упоры 2 выполнены заодно с KOjDOMbKлом 7, при помощ которого они {всажен::на эсьз 11 и шарн.ирно закреплены на кронштейнах 8 корпуса толкателя 3. Ось 1 1 при noMoiiBi флажка 10 соединена тя:;; И;::,: ;--;;;;; .: ис;; CKi}ii--i4l{l Jijirjn ii-i, КсЛИ 11::).;аьо Il
: Электр.)к;агк;гг,:х фла
:Г JCb 11 и КОЕ)ОМЫСЛ
HTijaiibHoe полож ;иие, свободно 1 рзь;шач) а 1руз стл ; ненол юння грузов п задан- j заданной программ у :ра iл :Kj;ц ;e ибглой гй ;. 1;олк/ ючень}
элек гроир1п:;зла:.И л -j к 1р:5Гра ;лшому кок мут руюи{е)у усг;;ой(.:гву 16.
Не лрадложегиок) хгл аейере гоузь:,; м;.)гут иере кл1 ;ггься н iUJHNiOM и обратнол гц лравлеииях, ii;)3 ioжиo одновремониое 1-с1речиое д Я1Женпе грузов с обеих tjQH штанги, а также ос -аног ка 1рузов НА, отдельных участках в оклЕ-;к;р;;,
Для ус7-ра} ений изгиба wubix. м:)ме;1тои, гм)зникающих в штанга j ар;: 1еиогрузке, она снабжен ; двумя рдб:-«;К1и ги,; раиилн;Л1.рами 12, no,; Ka;o4eHH;- Mt; к liJTaHre с oiiy:. OTopJH. пртгчем ГИарэпил; ;;;.;.. п}лсоьд;:нс иьг шбочкл Г)лостЯ)-;}; к э::(п:1:-1у зэппгнмку 1;;, 1ак -./ иодклюгег 1;с -глфог.илилдроь 12 и штаяге 1 эбесг э-гуи ает работу iJiTei:f4i на paCTB i eia;e i- пэзгэняог свости к ,-;.{ниму,1у нагибающие к;oi-.HSHTiji.
Толкающий конвейер, включаюл.ий штанГ); направлйюидте; то/ кятйль с onopKoij .ерХ1 эстью и прт-пзод, : - л и -; а ;о ii; и й с я тем. ЧТО; с целью обеспеченлк воз- к л :нocти перек-1зщек 5я грузов ку лзмеляющейся лрограмьге, толкатель йьшо.(ке;-г с двумг опорными поверхтюстямп, а ка штанга раоМбл.е;;1;Т угопь; с электрэма яит ;ымк переключателлли, при э-, ок; угорь; установлеко с розможиостыо Пг;ое: еше1;ия в горизэ1;тальной плоскости и взвил одейст пля с опоонылш rfOBenxHocTKMH толкателя,
1c;-0iJni;iH информоцлИ;, «лзинятт ;; J3O глпгдаиие при экс;; гизп;
1, ЛвтэрскЪс гвътзтельствэС- Сг
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележка подвесного толкающего конвейера | 1978 |
|
SU787290A1 |
| Установка для укладки строительных из-дЕлий B КОНТЕйНЕРы | 1979 |
|
SU850398A1 |
| Тележка подвесного толкающего конвейера | 1983 |
|
SU1146243A1 |
| ШАГОВЫЙ КОНВЕЙЕР | 1994 |
|
RU2078727C1 |
| Штанговый толкающий конвейер | 1981 |
|
SU967908A1 |
| ГРУЗОВАЯ ТЕЛЕЖКА ПОДВЕСНОГО ТОЛКАЮЩЕГОКОНВЕЙЕРА | 1970 |
|
SU288673A1 |
| Штанговый шаговый конвейер | 1983 |
|
SU1129146A1 |
| Подвеска подвесного толкающего конвейера | 1977 |
|
SU673549A1 |
| Подвесной толкающий конвейер с автоматическим адресованием | 1972 |
|
SU636153A1 |
| Толкающий конвейер | 1989 |
|
SU1696347A1 |