Автомат для регулирования мощности мотора буксирной
электролебедки.
Заявлено 3 мая 1940 года в НКМФ за № 382. Опубликовано 30 апреля 1941 года.
Предлагаемый автомат для регулировайия мощйОсти мотора буксирной электролебедки предназначен для выполнения следующих функций. Во время буксировки в открытом маре при любой погоде автомат поддерживает по возмож«оЬти постояивую заранее назнач-евную длину буксира и предулреждает возникновение в буксире сильных рывков или слабины, причем с ИЭменением натяжения буксира беспрерывно изменяет силу тяги лебедки так, чтобы сила т-яги лебедки всегда была равна «атяжению буксира.
Сипа тяги лебедки зависит исключительно от мощн-ости, которую В данный .момент ра 3вивает электродвигатель лебедки, следовательно, автомат, при изменении натяжения буксира, должен соответственно изменять мощность электродвигателя лебедки, а так как изменение мощности электродвигателя осуществляется обычно вращением валика контроллера, то автомат должен при изменении натяжения буксира вращать в ту или другую сторону валик контроллера лебедки. Во время буксировки лебедка неподвижна до тех пор, пока сила тяги лебедки точно равна натяжению буксира. При изменении натяжения в буксире барабан в лебедке начинает вращаться в ту или другую сторону: при увеличении натяжеиия - В сторону трав.тения, при уменьщении натяжения - в сторону выбирания. Назначение автомата состоит в том, чтобы, пользуясь вращением барабана лебедки из-за изменения натяжения в буксире, устанавливать валик контроллера в такое положение, чтобы мощность электродвигателя лебедки, а следователько, и сила тяги лебедки всегда, -на каждый момент точно соответствовала натяжению буксира.
Для ДОСТИЖ6БИЯ поставленной цели в данном автомате между валиком контроллера и валом барабана буксирного троса предусмотрен винтовой передаточный механизм, гайка которого при своем перемещении по валу поворачивает валиК контроллера.
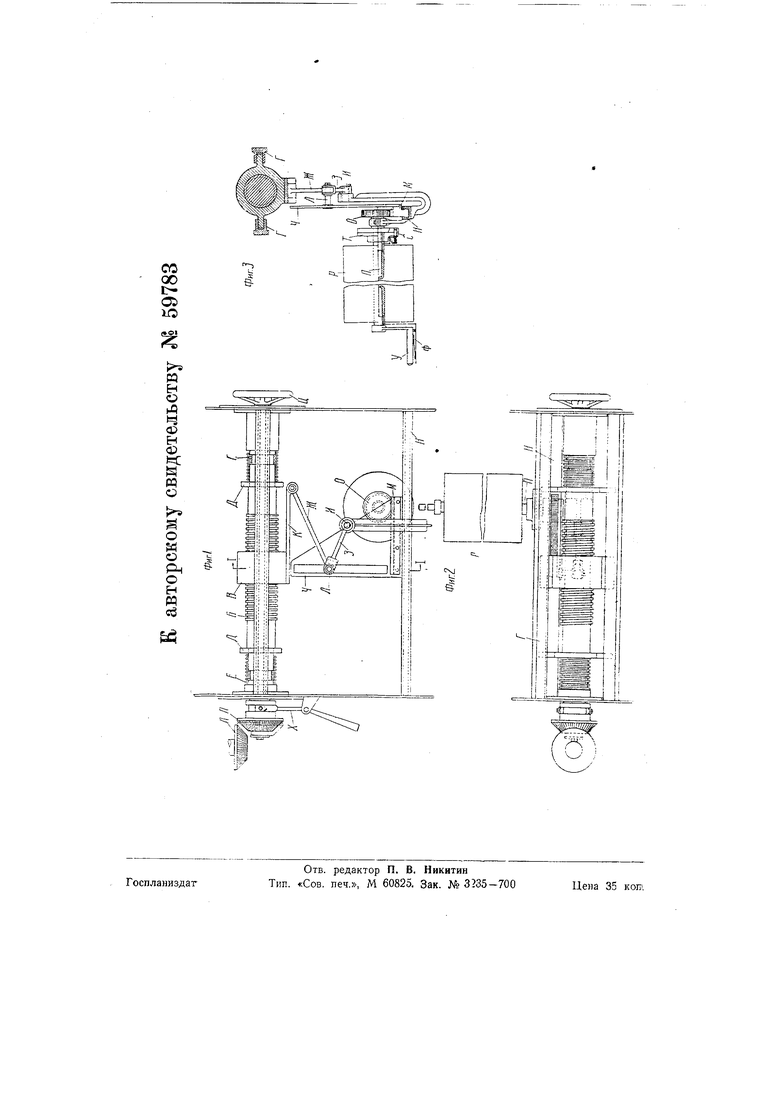
На чертеже фиг. 1 « 2 изображают схематически общий вид автомата в двух проекциях, фиг. 3 - разрез по I-I на фиг. 1.
Автомат представляет собой стальной прямоугольный ящик, прикрепленный одной стороной к станине лебедки. Сбоку из ящика выступает вал
автомата, сцапляющийся парой коиических шестерен А (фиг. 1) с главным валом (валам Фросоволо- барабана) лебедки. Сверху «а ящике расположен указатель положения контроллера с рукояткой У (фиг. 3) Для перевода вала контроллера вручную. Второй конец вала автомата выступает с другого бока ящика и на нем: надет маховик Ц (фиг. 1) для установки автомата вручную при разобщеиии вала автомата от .главного вала лебедки.
Вал Б автомата в средней части снабжен ленточной резьбой, по которой передвигается неаращ.ающаяся гайка В с тягой К. Длина нарезаниой части вала точно соответствует длине троса, какую может стравить или выбрать лебеДка при изменении натяжения буксира в пределах, наЗ|Нач&нных для этой лебедкн и для aMOfVTHsaUHH рьюка. Гайка В не 1ера|щает ся, а п.ри вращении вала Б скользит по «аправляющим Г. Оба конца вала Б обточены точно lOO внутреннему диаметру ленТ-очной резьбы, та1к что гайка В, сойдя с 1на1реза нной части вала Б в ту или другую cToipoHiy, может скользить по щенарезанной его части. На. каждый конец вала Б надето по, Д, которые яружинами Е .йсегда прижимаются к соо твет стаующшу буртику на валу Б.
При в ащени.и вала Б гайка В, передвигаясь по на1реэке, дохоДит до ненарезанной части вала и, не докадя на 10 мм до полного схода с р езьбы, начинает давиТь на Соответствующую шайбу Д и отодвигает ее вдоль по валу Б. Таким образом при продолжающемся вращении вала Б гайка В, сойдя тюлностью с нарезки « о тодвинув вдоль по валу Б шайбу Д, все время прижиадается последней к торцу нарезки на валу Б, вследствие чего, как только вал Б начнет в ращаться в обратную сторону, гайка В под давлением шайбы Д находит на нарезку вала Б.
К гайке В приболчена- тяга К, которая помощью серьги Ж шарнИрно соединена пальцем Л на ползуне с одним концом рычага 3, второй конец которого насажен на валик И. При передвижении тяги К ползу1Н Л скользит в прорези рамки Ч, приболчевной
к зубчатой рейке М, которая передвигается в направляющей Н.
Зубчатая рейка М приводит в действие шестерню О, насаженную вхоло. атую на вали1к П контроллера Р. Ступица колеса О закан1ч:йЕает ся диском, снабженным отверстием, в которое входит палец С. На валике П в средней части закреплен контактный барабан; на валике П против диСка колеса О насажена на шповке муфта Т (фиг. 3), в которую также входкт палец С. На внешний конец валнка П надсажена на шпонке рукоятка, заканчивающаяся ручкой У. К ручке У прикреплен рычат Ф, который системой тяг и рычагов связав с .пальцем С.
При захвате рукой ручки У рычаг Ф прижимается к ручке У, при этом палец С выходМт из отверстия, в диске колеса О. Оавобож1дая разжа1тием руюи ручку У., осв1обож1дают рычаг Ф, благ1о1даря чему палец С опять -входит в свое гнездо в диске колес-а О. Таким 06pai30.M при вращении вала Б автомата вращается валик П, а следовательно, и контактный барабан. Та1к как передача Движения от вала Б к валику П осуществляеЩся через винтовую и зубчатую передачи, то валик П невозможно noiBeipHyTb, пока он сцеплен с валом Б, т. е. поворот контактного барабана за рукоятку невозможен до тех пор, пока сжатием ручки У не будет поднят пашец С и диск колеса О не будет разобщен от муфты Т. Сцепление валика П с .колесом О может о существляться толыко тогда, когда палец С приходйтся то.чно против отверстия в дис.ке коле1са1 О, т. е. при работе автомата каждому положению ко нтактного барабаня точно соответствует определенное положение зубчатой рей1ки М и гайки В на валу Б.
Как уже указывалась выше, на одном конце вала Б, снаружи корпуса автомата, насажено на шпонке коническое колесо А, которое рычагом X может передвигаться вдоль по валу Б, сцепляясь и разобщаясь с коническим колесом А, пасаженньгм на главный вал лебедки. На втором конце вала Б, также снаружи iKoplnyca автомата, насажен маховик Ц .для установки вала В автомата в требуемое положение при начале буксировки.
При п€редвижен;ш гайки В из одного ее крайнего положения в автомате в другое крайнее положение лебедка может справить только определенную длину троса. Эта длина вытравливаемого лебедкой при работе автомата троса представляет собой сумму двух величин: длины троса во время травления, которым автомат по-ворачивает валик П контроллера на угол, до статомный Для увеличения мощности электродвита еля лебедки, а следовательно, для увеличения силы тяги лебедки от ее ми н;имума до ее максимума, и длинны троса, которую травит лебедка при ее максимальном тяговом усйл1И И для амортизации рьйка на т росе и после вытравливания конторой лебедка ав гоматкчески затормйживается электромапнИТНЫМ тормозом. Во В:ремя вытравливайия этой второй длииЪ троса (для амортизации рывка), -хотя йвтома)т продолжает дальше повора чявать валик контроллера, палец конт роллера дв1ижется по сплошной шине, поэтому мощ.ность электройв-игателя и сила тяги лебедки -обстаются поСТОЯНЙЫМИ и МаКСИМйЛЬМЫМИ.
Для бошьш1ей чувс т1вительнос:ти автомата и Для более точной регули(ровюи тягового усиЛИЯ лебедки, рычаги, соединяющие гайку В с зубчатой рейкой М, расположены так, что при травлении лебедкой первой длииы троса валик контроллера поьо рачйвается Hia большой угол (ориентировочво на 200-214°), при травлении же лебедкой второй длийы Tpoica валик контроллера поворачивается на малый угол (ориентировочно на 75-76°).
При схОде гайки В с «арезаняой части вала Б при увеличеиии натяжения буксира свыше наз-наченного, когда гайка В отодйИгает шайбу Д в ее крайнее положение, Д воздейстЬует на два контакта, из которых од-ин дает сигнал (заста1вляет звониггь звоиок и зажигает сигнальную красную лампочку), второй пре1краш,ает подачу така в электродвигатель и в электромагнитный тормоз. При сходе гайки В с нарезанной 4ia|CTK вала Б в обратном направлении, при уменьшенИ|И натяжения буксира ниже назначенного, когда гайка В отодвигает вторую шайбу Д в ее крайнее положение, шайба Д воздействует только на один контакт, который дает сигнал (заставляет звони ь звонок и зажигает синюю лампочку). В STOiM случае лебедка не стопорится, так как па1дейие натяжения в буксире сможет явиться следствием разрыва буксира, и в этом случае весь буксир ВО избежание намотки его на винт выбирается лебед кой автоматически;
Предмет изобретения.
1.Автомат для регулйравания мощН о1сти мотора букси1рной электролебедки, при ивменении «атяжени.я буксирного троса, с применением контроллера, о т л и ч а ю Щ и и с я тем, что между валиком контроллера и барабана букси рного троса помещен винтовой передаточный механизм, гайка коего при 1своем передвижении в ту или иную сторону по валу повора чивает валик кон1троллера.
2.Форма выполнения автомата по п. 1, отличающаяся тем, что гайка винтового передаточного механизма шарнирно связана тягой К, серьгой Ж и рычагом 3 с рамкой, несущей зубчатую рейку, оцепляющуюся с шестерней валика контроллера.
3.Форма выполнения автомата по пп. 1 и 2, отличающаяся тем, что рамка, несущая рейку, снабжена прорезом для ползуна щарнирного сочлеиення рычага 3 с серьгой Ж4.Форма выполнения а1втомата по п. 1, отличающаяся тем, что по концам винта расположены подпружиненные контакты, включающие цепь тока для пОДачи: сигнала при передвижении гайки в ту или другую сторону на величину свыше установленной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для смены бобин на ватерах | 1932 |
|
SU36877A1 |
| Устройство для автоматического регулирования натяжения троса электрической лебедки | 1935 |
|
SU48710A1 |
| Букристое устройство | 1976 |
|
SU652032A1 |
| ЛЕБЕДКА | 1995 |
|
RU2099276C1 |
| Ткацкий станок для выработки, например, тканей "Броше" | 1956 |
|
SU111419A1 |
| Программное устройство | 1988 |
|
SU1733370A1 |
| Маневровая лебедка | 1950 |
|
SU98911A1 |
| Устройство для снятия початков и установки шпуль на прядильных машинах | 1948 |
|
SU81854A1 |
| Лебедка | 1929 |
|
SU16846A1 |
| Ударный пресс для изготовления бетонных камней | 1933 |
|
SU41416A1 |