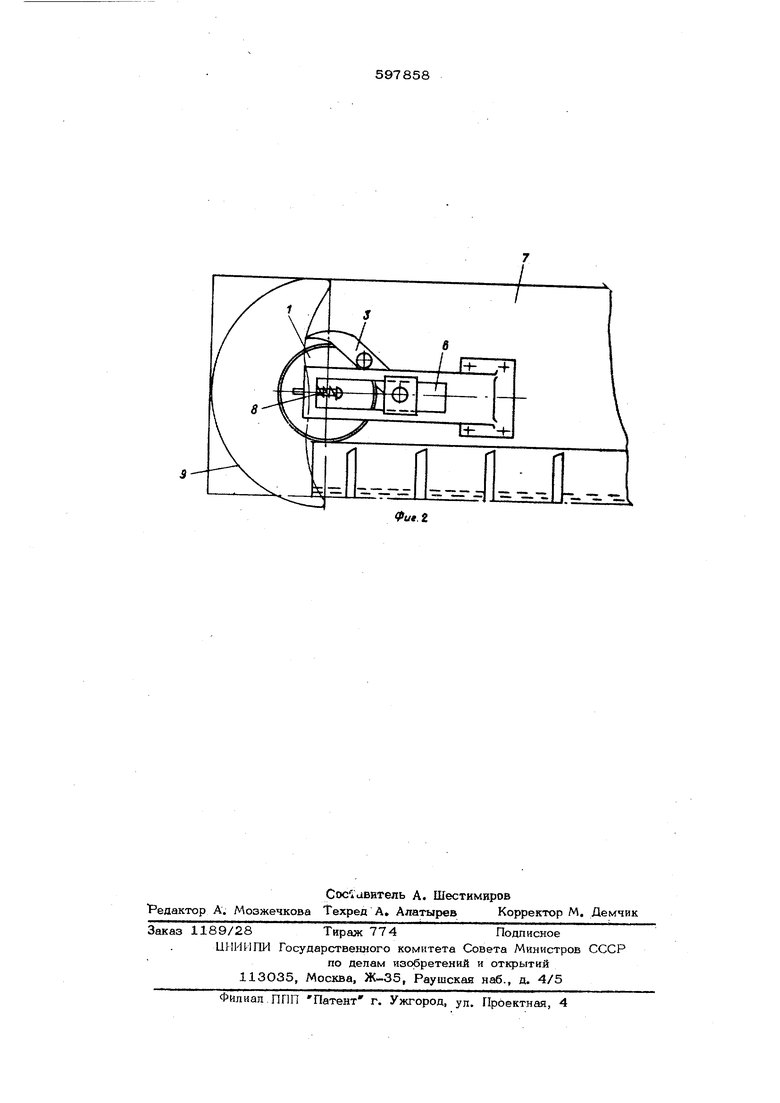
Изобретение относится к горному машиностроению и может быть испопкзовано, в частности, в угольной и горнорудной про- мышленности. Известен погрузочный орган непрерывного действ ш с нагребающими лапами, выполненными в виде четырехзвенного шарнирного механизма,состоящего из кривошипа, шатуна и качателя||1. Недостатком указанной конструкдвги является возможность защепления (заклинивания) кусков горной массы в эпектентах механизма. Наиболее близким к предлагаемому является погрузочнУй орган непрерывного действия , включающий питатель с нагребающими лапами, приводимыми в действие кривошипами. Каждая нагребающая лапа имеет корпус, который одним концом крепится на пальце кривошипа, а другим скользит по направляющему ползуну, закреппенному на раме заборно-погрузочной части 2Д При вращении кривошипа передняя часть корпуса папы с укрепленным на ней греб- . кбм описывает сложную траектор-яю и загребает горную массу на конвейер. Недостаток .известной конструкции заключается в том, что погрузочнь й орган работает в режиме больших динамических нагрузок, обусловленных неравномерностью движения нагребающей лапы как при рабочем ходе (внедрение в штабель погружаемого материала, перемещения его по питате- лю и передача на конвейер), так и при холостом ходе. Цепью изобретения является снижение сил сопротивления перемещен1по в навале горной массы, уменьшение динамических нагрузок и обеспечение выхода ползуна из мертвой точки Поставленная де достигается тем, что нагребающая лапа шарнирно соединена с поярком, установленным в направляющем паэу, ось которого пересекает ось вращение кривошипа, причем расстояние от оси шарНира, соеднняюше1-о кривошип с лапой, до оси шарнира, соединяющего лапу с ползуном, равно радиусу кривошипа. Кроме того, направляющий паз снабжен установлезшым лад осью вращения кривошипа отбойным меxaнизмoм выполненным , например, в виде пружины. На фиг. 1 изображен описываемый погрузочный орган, вид сбоку jHa фиг. 2-тоже, видвппане. Погрузочный орган непрерывного действия состоит из кривошипа 1. соединенного посредством шарнира 2 с нагребающей лапой 3. Нагребающая лапа шарниром 4 сое динена с ползуном 5, который установлен в направляющем пазу 6, выполненном в нып равляюшей, укрепленной на питателе 7. В конпе направляющего паза установлено отбойное устройство 8, Погрузочный оргал работает следующим .oбpaзo f. Под действием приложенного момента кривошип 1 вращается с постоя.нной угловой скоростью (на фигурах кривошип вращается против часовой стрелки), передавая через щарнир 2 усилие на нагребающую лапу 3.i Один конец папы движется по направлению к носку питателя, а другой, шарнирно соединенный с ползуном 5, перемешается в пазу 6 по направлению к оси вращения крив шипа. Так как расстояние между шарнирами 2 и 4-равноI-радиусу кривошипа, то после того, как Ось шарлира 4 совпадает с осью вращен Ш кривошипа, нагребающая лапа начинает перемещаться по круговой траектори В этот момент пружина отбойного устройства 8 сжата ползуном 5 и стремится сдвинуть его от центра вращения кривошипа но Этому ирегштствует кривошип. При повороте лапы на 180 отбойное устройство 8 сдвигает ползун 5 (в этот момент кривощип не препятствует движению ползуна, выводя его кз мертвой точки) и далее он под действием кривошипа движет ся по направляющему пазу 6 от центра вра шения кривошипа до тех пор, пока шарнир 2 не совпадает с осью направляющего паза б После пересечения шарниром 2 направляющего паза 6 нагребающая лапа 3 начинает движение, описанное выше. Траектория движения конца нагребающей папы за один оборот кривошипа показана на чертеже тонкой замкнутой пинией 9, Описываемая конструкция погрузочного органа обеспечивает равномерное перемещение нагребающей папы в процессе внедрения ее в штабель, зачерпывания материала и перемещения его по питателю и позволяет уменьшить динамические нагрузки, возникающие во время работы. Формула изобретения 1,Погрузочный, орган непрерывного действия, включающий питатель с нагребаюшнмн лапами, .приводимыми в яействие кривошипами, отличающийся тем, что, с целью снижения сип сопротивления перемещению в навале горной массы и уменьшения динамических нагрузок, нагребающая лапа шарнирно соединена с ползуном, установленным в направляющем пазу, ось которого пересекает ось вращения кривошипа, причем расстояние от оси шарнира, соединяющего кривощип с папой, до оси шарнира, соединяющего лапу с ползуном, равно радиу су кривошипа. 2.Погрузочный орган по п. 1, о т л ичающийся тем, что, с целью обеспечения выхода ползуна из мертвой точки, направляющий паз снабжен установленным над осью вращения кривошипа отбойным механизмом, выполненным, например, в виде . пружины. Источники информации, принятые во вннмбшие при экспертизе: 1.Кальницкий Я. В., Филимонрв А. Т. Самоходное погрузочное и доставочное обору-, дование на подземных рудниках, М., Недра, 1974, с. 71. 2.Макашов А. Н., Сорокин Е. А. Погру зочная машина ПНБ-Зк, М., Недра, 1971, с, 47.
i-JUJkl-.-.

| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочная машина с нагребающими лапами | 1981 |
|
SU977829A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1991 |
|
RU2042830C1 |
| Погрузочная машина | 1980 |
|
SU918446A1 |
| Погрузочный орган горной машины | 1983 |
|
SU1145161A1 |
| Погрузочная машина | 1982 |
|
SU1084468A1 |
| Погрузочный орган непрерывного действия | 1978 |
|
SU665104A1 |
| Погрузочный орган непрерывного действия | 1978 |
|
SU685841A1 |
| Погрузочная машина | 1977 |
|
SU607055A1 |
| Погрузочный орган горной машины | 1985 |
|
SU1273607A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1990 |
|
RU2022894C1 |