1
Изобретение относится к области станкостроения и может быть использовано в усгройствах дня глубокого сверления с периодическим. 1 выводом инструмента на обрабатываемого отверстия.
Известны устройства для сверления глубоких отверстий, включающие гидроцилиндры рабочих и ускоренных перемещений, соединенные с источником давления чероа распределители для каждого гидроцилиндра, и аппаратуру управления .
Недостатком этих устрЪйств является наличие скачка подачи в начале работы гидроципиндра рабочих подач, что вызывает попомку инструмента,
: Целью изобретения является повышение производите/1ьности за счет исключения скачков исполнительного органа при переходе на рабочую подачу.
Это досгигается доиопнительным .введением распределителя и дросселя, установленных последовательно перед распределителем гидроцилиндра рабочих, перемещений.
На чертеже схематически изображено предложенное устройство.
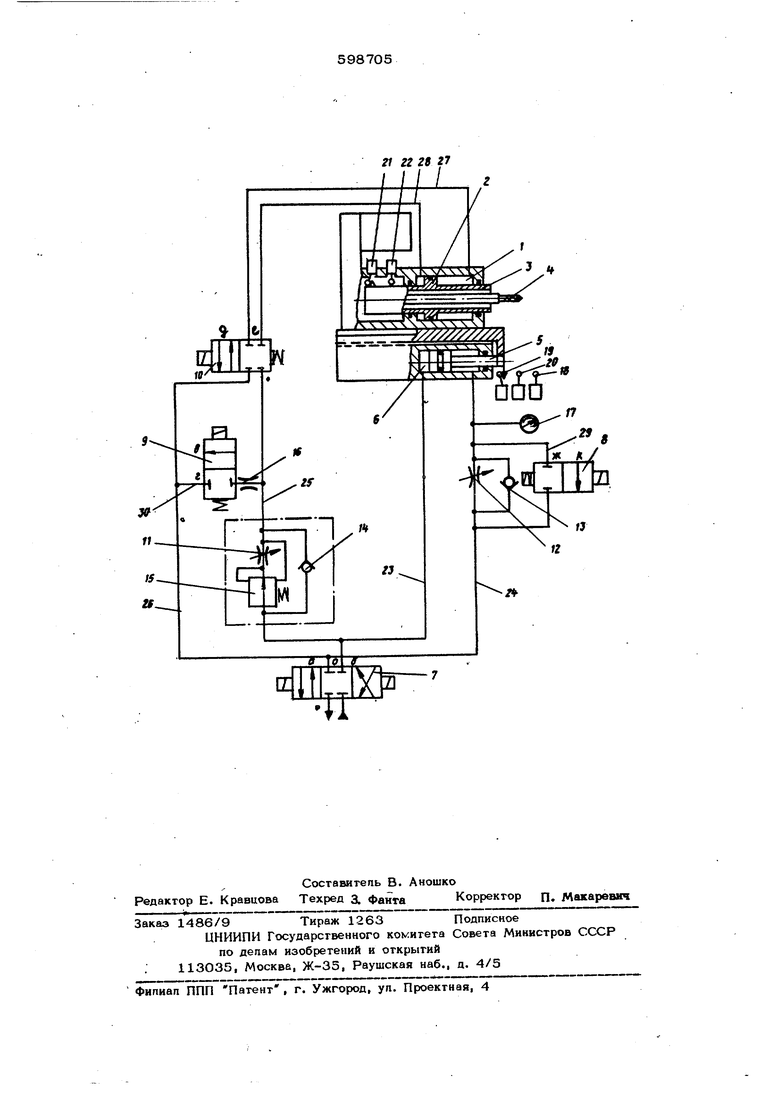
Оно содержит гидроцилиндр 1 раб9чих перемещений, в котором расположен поршень 2 на пиноли 3 с проходящим через нее инструментальным шпинделем-4 и который жестко связан со штоком 5 цилиндра 6 ускоренных перемещений. Устройство содержит также реверсивные распределители 7-10, дроссели 11 и 12 с обратными клапнами 13 и 14 и регулятором 15, дроссель 16, реле давления 17, датчики 18, 19и2О гидроцилиндра 6 ускоренных перемещений, датчики 21 и 22 конечных положений пинолн и трубопроводы .23-ЗО, связывак щие гидравлическую аппаратуру.
Позиции золотников обозначены строчными буквами алфавита.
Устройство работает следующим образом.
По команде на начало цикла .включается позиция ft-j распределителя 7 и позиция п распределителя 8. Рабочая жидкость по трубопроводу .23 поступает в бесштоковую полость гидроцилиндра 6, а по трубопроводам 29 и 24 через распределители 8 и 7 сливается из штоковой полости. Осушествпяется ускоренное перемещение. Рабочее
перемещение невозможно, так как трубопровод 25 перекрыт, потока жидкости через дроссель 11 нет и регулятор 15 полностью открыт. Шток 5 перемещается вперед, воздействувт на датчик 18, который дает команду на переключение распределителя 8 в положениеде, перекрывая трубопровод 29. Жидкость из штоко ., полости цилиндра 6 идет через дроссель 12, происходит торможение. Одновременно распределитель 9 перекпнэчается в позицию 6 . Поток жидкости из напорной магистрали через дроссель 11с регулятором 15 по трубопроводу 25 через дроссель 16, распределитель 9 и далее по трубопроводу 26 попадает в сливную магистраль. Дроссель при этом настроен так, что давление в трубопроводе 25 становится примерно равным рабочему.
На дросселе 11 создается перепад давления, равный рабочему и регулятор 15 устанавливается в рабочее положение.
При дальнейшем перемещений поршень ципиндра 6 останавливается жестким упором , давление в трубопроводе 23 растет, а в трубопроводе 24 падает. Срабатывает реле 17, давая команду на срабатывание распределителя 10, который переходит в позицию д , а распределитель 9 переходит в позицию 2.Жидкость поступает через дроссель 11,регулятор 15, распределитель 1О по трубопроводу 28 в левую полость цилиндра рабочих перемещений 1 (по чертежу). Поршень 2 перемешается вправо, осуществляя рабочую подачу пинопи 3 со шпинделем 4. Вытесненная из правой полости жидкость по трубоп{юв6дам 27 и 26 через распределители 10 и 7 сливается в бак Так как р)егулятор 15 перед включением рабоней подачи уже нагружен рабочим давглением, скачка подачи не будет. В заданный момент подается команда на вывод инструмента из обрабатываемого отверстия. При этом распределитель 10 переключается в позицию С. , запирая жидкость в обеих полостях ципиндра рабочих перемещений
1, т.е. стопоря его. Распределитель 7 пере-, ключается в положение 6. Происходит изм нение направления движения потока .жидкости в трубопроводах 23 и 24. Шток 5 цилиндра 6 перемещается влево, выводя инструмент из обрабатываемого отверстия. Вывод происходит до тех пор, пока не сработает датчик 20 и не даст команду на быстрый ввод инструмента, т.е. распределитель 7
переключается в положение э,, и цикл повторяется.Так как гидроцилиндр рабочих перемещений 1 запоминает положение инструмента, а гидроцилиндр 6 доходит до одного и того же упора, кромка инструмента дохо:дит до того места, где был прерван процесс резания. Об окончании работы сигнализирует датчик 22, по команде которого распределитель 7 переключается в положение хГ.и в обоих цилиндрах одновременно поршни перемешаются влево, возвращая все элементы устройства в исходноеположение, фиксируемое датчиками 21 и 19.
Формула изобретения
Устройство для сверления глубоких отвер стий, включающее гидроцилиндры рабочих и ускоренных перемещений, соединенные с источником давления через распределители цля каждого гидропилиндра, и аппаратзфу
управления , включаютпуто дроссель с регулято I ром давления, отличающееся
тем, что, с целью повышения производительнЬсти за счет исключения скачков исполнительного органа при переходе на рабочую подачу, в нем дополнительно выполнены распределитель и дроссель, установленные по- следовательно перед распределителем гидроцилиндра рабочих перемещений.
Источники информации, принятые во внимание при экспертизе;
1. Авторское свидетельство СССР № 142855, кл.в 23 В 41/О2, 1961.
эт гг 28 27
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВАЯ ГОЛОВКА | 1992 |
|
RU2009784C1 |
| Многопозиционный агрегатный станок | 1989 |
|
SU1779544A1 |
| ГИДРОПОРШНЕВОЙ НАСОС | 2003 |
|
RU2242638C1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| Устройство для автоматического управления подачей по величине крутящего момента на сверле | 1980 |
|
SU904913A1 |
| ГИДРОПРИВОД ПРЕРЫВИСТОЙ ПОДАЧИ | 1997 |
|
RU2128788C1 |
| ГИДРАВЛИЧЕСКАЯ ГОЛОВКА | 1991 |
|
RU2090785C1 |
| Станок б.в.федорова для накатывания профилей на валах | 1973 |
|
SU559760A1 |
| Гидромеханический пресс | 1987 |
|
SU1433830A1 |
| Силовая гидравлическая головка | 1991 |
|
SU1804958A1 |