Изобретенав относится к транспортному .машявастроенто, в чйстности к руяевому прввову транспортяого средства со всеми управляемыми колесамн.
Известен рулевоб нрввоа траесвортиого средства со всема управляемы «а колесамв, содержащий рулевую трапе18ия вереянах уп равпаемых колес, соеднневйую с- рулевым . механизмом и посредством продольного прввода в кулисного механизма - с руаевой трапецией задш1х управляемых колес {ij.
Данный привод техаологичесвн сложен, ненадежен, недолговечен в работе и на обео печивает точного возврата задних управляемых колес в положение враамолинейного jj движения.
Известен также рулевой привод траиснорэчного средства со всеми управляемыми колесами, содержащий рулевую трапециюпередних управляемых колес, соединенную JQ с рулевым механизмом, и посредством рычажного привода и кулисного механизма, в кулисе которого выполнен паз, взаимодейст вуюший своей внутренней поверхностью с установленным на оси роликом, связанную с 25
рулевой трапецией задних управляемых колес |2j.
Применение в кулисном механизме установленного на оси ролика взаимодействую шего с пазом кулисы, снвжает потерн на трение R позволяет несколько то ность соблюденкв заданной зависимости поворота задних управляемых колес от по ворота передних. Однако этот привод не обеспечивает плавности поворота стабилкзапии задних управляемых колес.
Цель изобретения - повышение плавноо ти поворота стабилизации задних управляемых колес, а также надежности и допговеч ности рулевого привода.
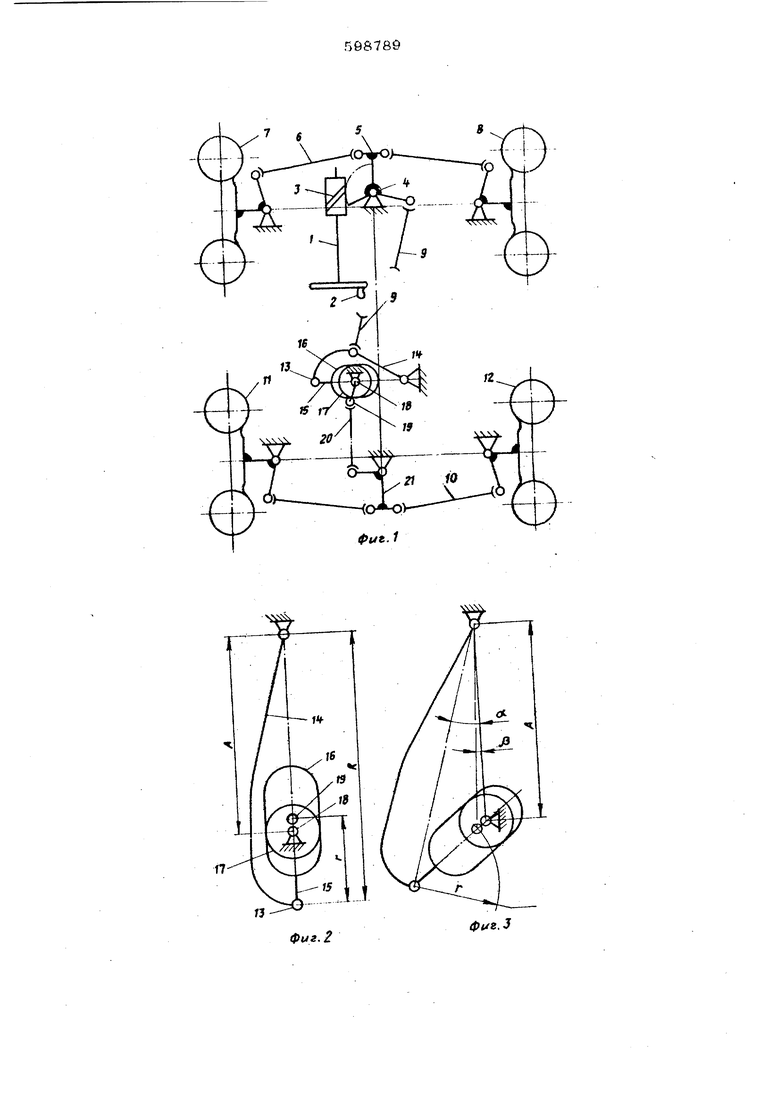
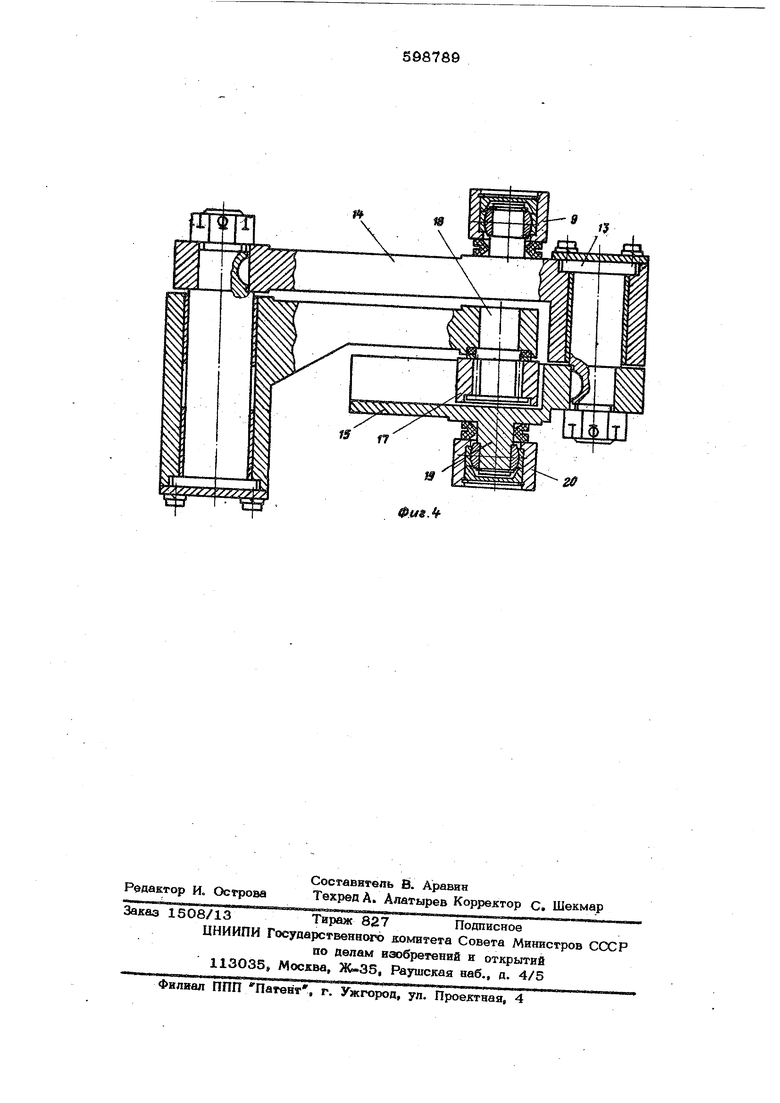
Для этого кулиса поворотно установлена на оси, жестко связанной с качающимся рлчагом, соединенным с-рулевой трапецией передних управляемых колес, и снабжена шипом, расположённым на продольной оси паза кулисы и шарнирно соединенным с ру левой трапецией задних управляемых колес, при этом ось ролика шлполнена неподвижной относительно транспортного средства. Кроме того, ось ролика смещена относительно шипа в сторону оси поворота кулисы. На фиг. 1 изображена кинематическая схема привода; на фиг. 2 и 3 - кинематидеская схема поворота кулисы в положениях соответственно прямолинейного движения и поворота; на фиг. 4 - кулис1Ш1й механизм в разрезе. .tja/i 1 рулевого колеса 2 через гидроусйпи,тель 3 взаимодействует с валом 4 ру;де..е.аго механизма, который с помощью жесткого двуплечего рычага 5 соединен с рулевой трапецией 6 передних управляемых 7 и 8 и с тягой 9 рычажного привода рулевой трапеции 10 задних управляемых колес 11 и 12. На оси 13, жестко закрепленной на про межуточном качающемся рычаге 14, установлена, поворотная кулиса 15, выполненная: с пазом 16, взаимодействующим своей внут ренней поверхностью с роликом 17, уста новленным на неподвижной оси 18, и шипом 19, расположенным на продольной оси паза 16 я соединяюЬаим кулису 15,тягой 20 непосредственно с качающимся рычагом 21 рулевой трапеции задних управляемьтх колес 11и 12. В зависимости от смещения оси 18 ролврка 17 относительно оси шипа 19, равного A-R , обеспечиваются различные законы поворота задних управляемых колес 11, 12 в зависимости от поворота передних упра&ляёмыя колес 7, 8.. Если это смещение равно или меньше О, то обеспечивается различнаястепень запаз-. аывания поворота задних управляемых колес 11, 12, пропорциональная dL-|b, за счет того, что при малых углах поворота сС рычага 14 кулиса 15 поворачивается относите л 18 ролика 17, имея малые перемещения вдоль паза 16, обусловливающие угол ее поворота |J. Если это смещение больще О, то при малых углах поворота рычага 14 и при.ма-, лых смещениях обеспечивается незначительнь1й поворот задних управляемых колес 11, 12в сторону, противоположную повороту транспортного средства, а при больших углах - в сторону поворота машины, что дает возможность принудительно возвращать задие управляемые колеса Ц, 12 в положение рямолинейного движения. Г{овыщение точности возврата задних упавляемых колес 11, 12 в положение пряолинейного движения и надежность стабилиации их в атом положении обеспечивается ем, что при малых смещениях оси 18 роика 17 относительно оси шипа 19 кулисы 15 в положении прямолинейного движения улисный механизм необратим и зазоры рыажного привода до кулисного механизма не лияют на положение задних управляемых колес 11, 12 в положении прямолинейного движения. Формула изобретения 1.Рулевой привод транспортного средства со всеми управляемыми колесами, содержащий рулевую трапецию передних управляемых колес, соединенную с рулевым механизмом, и посредством рычажного привода и кулисного механизма, в кулисе которого выполнен паз, взаимодействующий своей внутренней Поверхностью с установленным на оси роликом, связанную с рулевой трап&цией задних управляелд 1Х колес, отличающийся тем, что, с целью повышения плавности поворота стабилизации задних управляемых колес, а также надежности и долговечности рулевого привода, кулиса поворот-. н(| установлена на оси, жестко связанной с качающимися рычагом, соединенным с рулевой трапецией передних управляемых колес, и снабжена шипом, расположенным на продольной оси паза кулисы и шарнирно- соединенным с рулевой трапецией задних управляемых колес, при этом ось ролика выполнена неподвижной относительно транспортного средства. . 2.Рулевой привод по п. 1, о т ли ч аю щ и и с я тем, что ось ролика смещена относительно шипа в сторону оси поворота кулисы. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство N° 189697, кл. В 62 Б 7/2Q, 1948 г. 2.Авторское свидетельством 422652, кл. В 621 7/20, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМЫХ КОЛЕС | 1999 |
|
RU2168437C2 |
| РУЛЕВОЙ ПРИВОД ДЛЯ КОЛЕСНЫХ МАШИН СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1973 |
|
SU380513A1 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| ГРУЗОВОЙ ВЕЛОСИПЕД ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ | 1999 |
|
RU2158212C1 |
| Система рулевого управления транспортного средства со всеми и управляемыми колесами | 1984 |
|
SU1206161A1 |
| Устройство управления передними колесами тягового загрузчика | 1991 |
|
SU1789406A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| Транспортная система, содержащая трубопровод и транспортное средство для перемещения внутри трубопровода | 2019 |
|
RU2714277C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2012 |
|
RU2501700C1 |
фиг. 2
ipue.J
ФиаЛ
