1 1
Изобретение относится к транспорт™ ному машиностроению, в частности к гидравлическим системам рулевого управления транспортных средств, и может быть использовано в рулевых приводах для изменения режима поворота транспортного средства со всеми управляемыми колесами.
Цель изобретения - улучшение ма невренности транспортного средства.
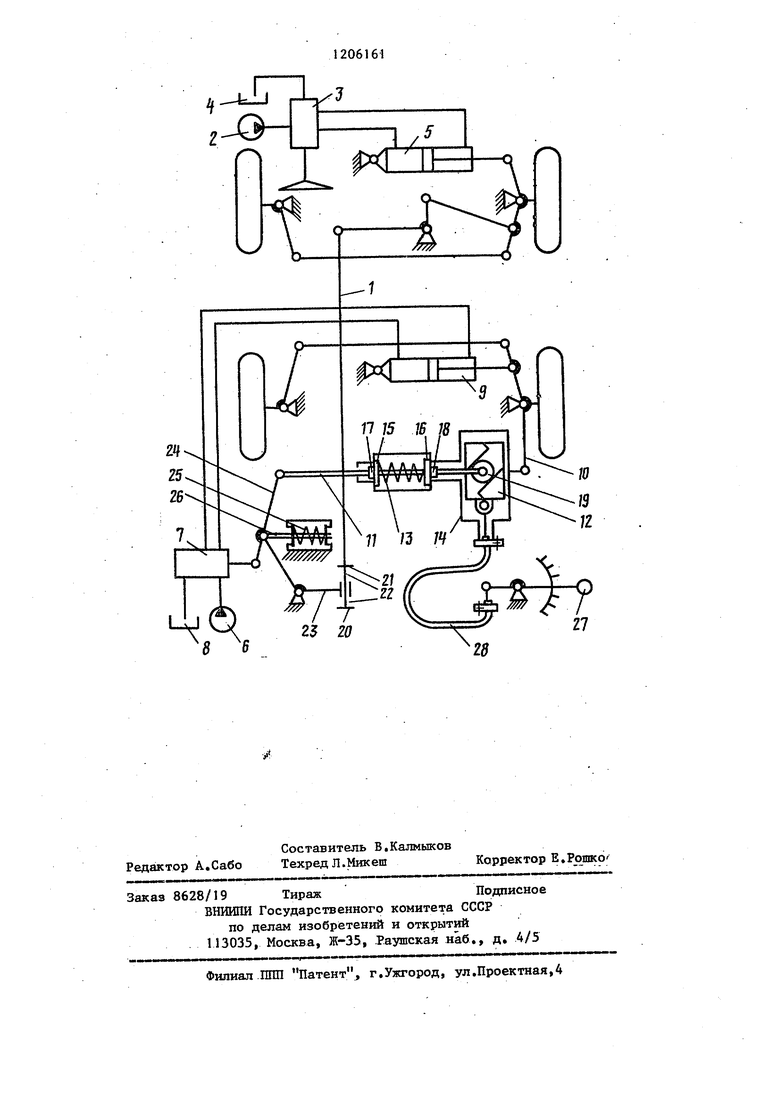
На чертеже показана гидрокинематическая схема системы рулевого управления;,
Система рулевого управления транспортного средства со всеми управляе- мьми колесами состоит из гидравлического привода управления передними колесами и связанного с ним продольной тягой 1 гидравлического при™ вода управления задними колесами. Гидравлический привод управления передн1-ши колесами содержит наг сое 2, гидрораспределитель 3, гидро- бак 4, гидроцилиндр 5. установленный в рулевой трапеции передних уп равняемых колес,
Гвдравлический привод управления задними колесами содержит насос 6, гидрораспределитель 7, гидробак 8, гидроцилиндр 9, встроенный в рулевую трапецию задшж управляемых колес з рьмаг 10 трапеции задних колес, тягу обратной связи9 механизм запаздьюа- НИН начала, поворота задних колес и рькажио-пружинный механизм стабили зацин задних колес в среднем поло-женин.
Механизм изменения длины тяги обратной связи выполнен в виде телескопа и состоит из штока 11 , тфав- ляекого кулачка 12, пружины 13 двухстороннего действия и корпуса 14, связанного с рычагом 10 трапеции заД них колес. Под торцами пружины 13 установлены шайбы 15 и 16, опираголхие ся одновременно на корпус 14 и упоры 17 и 18 на штоке П., 1айбы 15 и 16 вьшолнены подви кнымк относительно штска 11. Пружина 13 удерживает шток 1 в среднем положении относительно ко1)пуса 14с, Шток 11 несет ролик 18, входящий в паз управляемого кулачка 12.
Механизм запаздывания начала поворота задних колес относительно передних состоит из двух Iopoв 20 и 21, жестко закрепленных на продольной
06161.2
тяге 1 и обхватьшающих с зазором 22 головку дауплечего: рычага 23,
Пружинный установитель тяги состоит из двуплечих рычагов 23 и 24, пру5. жины 25 двухстороннего действия и штока 26. Двуплечий рычаг 23 одним плечом связан с продольной тягой 1, а на втором плече несет шарнирно подсоединенные рычаг 24 и шток 26.
10 Один конец двуплечего рычага 24 связан с золотником гидрораспределителя 7, второй - со штоком 11 тяги обратной связи. Для управления кулачком 12 служит рукоятка 27, связан15 ная с ним тросом 28,
Рулевое управление работает следующим образом, /
При повороте передних колес влево тяга 1 перемещается вверх по
20 чертежу). Пока тяга 1 движется в пределах зазора 22 между зшором 20 и головкб й двуплечего 23 рулевое управление работает как система с запаздьшанием начала поворота зад25 них колес относительно передних, В этом случае при отсутствии задающего сигнала на рукоятке 27 задние колеса находятся в среднем положении. После выбора зазора 22 и при даль30 нейшем повороте передних колес влево -упор 20 поворачивает рычаг 23, с кимая через шток 26 пружину 25 с правой стороны. При этом рычаг 24, поворачиваясь на шарнирной оси што
, ка 11, вьшодит золотник гидрораспределителя 7 из нейтрального положения, В гидроцилиндр 9 от насоса 6 начинает поступать рабочая жидкость, задние колеса поворачиваются вправо,
in и, отрабатьшая сигнал рассогласования, рычаг 10 перемещает влево, как одно целое, корпус 14, управляемый кулачок 12 и штЬк 11, Золотник гидрораспределителя 7 возвращается в
ле нейтральное положение, задние колеса останавливаются в повернутом положении.
При возвращении передних колес из левого поворота в среднее положение тяга 1 перемещается вниз Гпо чертежу) , Пружина 25, перемещая шток 26 вправо, поворачивает рычаг 24 на шарнирной оси штока 11. Золотник г.ид рораспределителя 7 смещается с нейт- 55 рального положения, и задние колеса начинают поворачиваться влево, возвращаясь в среднее положение. Рычаг 10 перемещает корпус 14, кула-
31
чок 12 и шток 11 вправо. При установ ке пружины 25 в нейтральное положение задние колеса устанавливаются в среднее положение. Тяга 1, перемещаясь дальше вниз (по чертежу), отводит упор .20 от головки рычага 23, При дальнейшем возвращении передних колес в среднее положение задние колеса неподвижны.
Работа рулевого управления при пО повороте вправо с запаздьшанием поворота задних колес аналогична рассмотренному повороту влево.
Для задания режима поворота способом краб рукоятка 27 поворачивается на некоторый угол и трос 28 смещает кулачок 12, При смещении кулачка I2 вниз (по чертежу)ролик 19, передвигаясь относительно паза кулачка 12, перемещает при неподвижном корпусе 14 шток 11 вправо , сжимая пружину 13, Шток 11 поворачивает рычаг 24 относительно неподвижного штока 26 и выводит золотник гидрораспределителя 7 из нейтрального положения. В гидроцилиндр 9 поступает рабочая жидкость, задние жоле- са поворачиваются на некоторый угол вправо. Рычаг 10, отрабатьюая сигнал рассогласования перемещает влево, как одно целое, корпус 14, управляемый кулачок 12 и шток 11. Шток 11
061614
поворачивает рычаг 24 относительно, неподвижного штока 26 и возвращает золотник гидрораспределителя 7 в нейтральное положение. 5 При движении с повернутыми на некоторый угол задними колесами транспортное средство начинает перемещаться по криволинейной траектории. Оператор, чувствуя это, пово10 рачивает передние колеса на угол,
равный углу поворота задних колео; Транспортное средство начнет перемещаться крабом. Поворот передних колес в пределах угла запаздьюания J5 не изменяет угол установки задних колес, определяемый рукояткой 27,
Для установки задних колес в среднее положение рукоятка 27 возвращает20 ся оператором в нулевую позицию. При этом кулачок 12 сдвигается вверх (по чертежу) и шток 11 при неподвижном корпусе 14 перемещается влево, поворачивает рычаг 24 и вьшодит зо25 лотник гидрораспределителя 7 из нейтрального положения. Рабочая жидкость поступает в гидроцилиндр 9 и задние колеса возвращаются в среднее положение, Рычаг 10 перемещает корпус 14,
-.кулачок 12 и шток 11 вправо. Золот- -.ник гидрораспределителя 7 возвращается в нейтральное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1988 |
|
SU1565741A1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1990 |
|
SU1729880A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1999 |
|
RU2164211C2 |
| СПОСОБ ДИСТАНЦИОННОГО ГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ И ДИСТАНЦИОННОЕ РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2012 |
|
RU2488508C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1991 |
|
RU2013269C1 |
| Устройство для управления транспортным средством с прицепным звеном | 1978 |
|
SU679462A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1985 |
|
SU1298124A1 |
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1983 |
|
SU1126482A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |

ЙХ1 11-h 5
27
Редактор A.Сабо
Составитель В.Калмыков
Техред Л. Мик еш Коррек тор Е, Рошко
Заказ 8628/19 ТиражПодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, Л/5
Филиал ППП Патент, г.Ужгород, ул.Проектная,4
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1978 |
|
SU710854A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
