.1
Изобретение относится к угольной,. горнорудной промышленности и промышленности строительных материалов, а также может быть использовано во всех отраслях, требующих применения, погрузочных машиннепрерывного действия для погрузки насыпных грузов.
Известны гидравлические системы уп равления погрузочной машиной, включающие насос, гидромоторы приводов ходовой части и погрузочного органа, в которых: регулирование осуществляется с помощью гидромеханического дифференциала. Однако такое устройство не поз- воляет обеспечить саморегулирование скорости подачи на погрузочном органе в зависимости от нагрузки.
Известны также гидравлические сие- гемы управления погрузочной машиной включающие насос, гидромоторы привода ходовой части и погрузочног-о органа, соединенные параллельно, управляющее устррйство, выполненное в виде дифференциального гидроцилиндра и регулируемого дросселя.
Цель изобретения - обеспечение автоматического регулирования скорости подачи машины в зависимости от нагрузки ла погрузочном органе.
Цель достигается тем, что в предлагаемом устройстве одна из полостей дифференциального гидроцилиндра включена параллельно в напорную линию гидромогора привода погрузочного органа, а другая -..в напорную линию насоса через ; е1 лятор давления и дроссель, установленный в напорной линии гидромотора ходовой части, при этом шток дифференциального гидроцилиндра и дроссель свя,заны между собой посредством механической передачи.
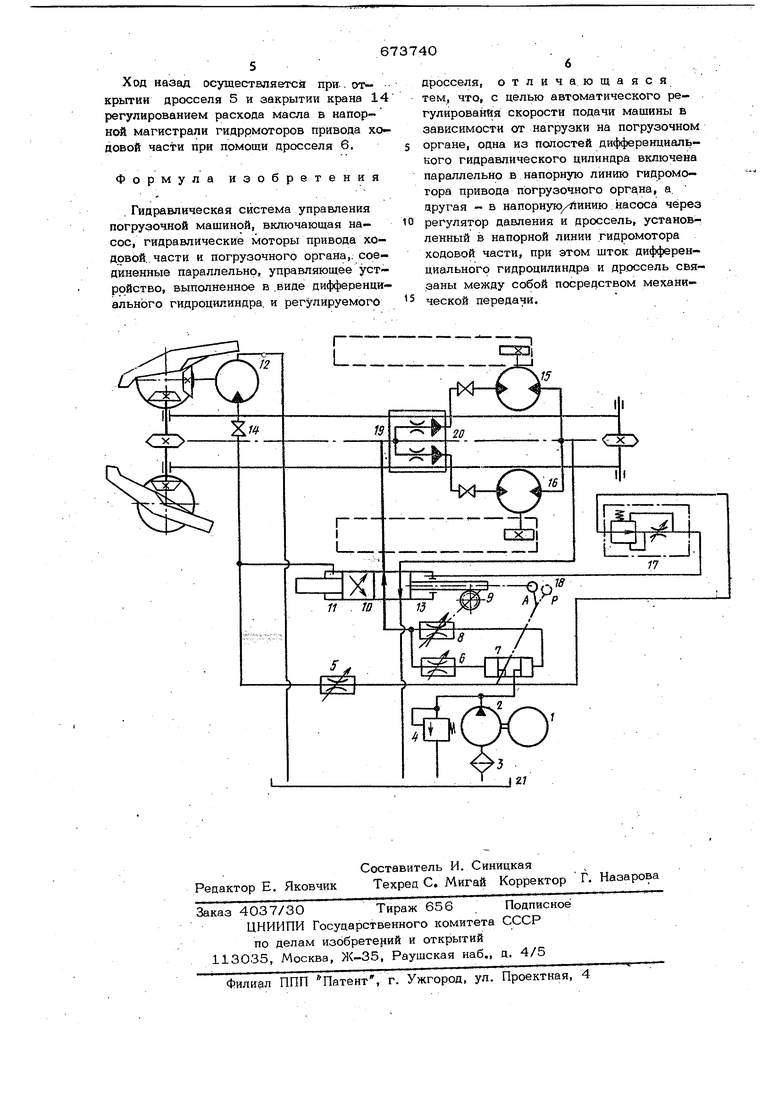
На чертеже представлена схема предлагаемой системы.
Р
Она состоит из двигателя 1, насоса 2 постоянной производительности, фильтра 3, предохранительного клапана 4, дросселя 5 регулирования расхода жидкости на гидро1 отор привода погрузочного органа, дросселя 6 регулирования расхода масла на гидромоторы ходовой части при маневровых операциях, крана 7 переключения системы с автомати ческого (А) на ручное (Р) управление с промежуточным положением Стоп и для переключения на ход Назад йри аварийной.перегрузке погрузочного органа, дросселя 8, установленного на напорной линии гидромоторов ходовой части, механической передачи 9, связанной со штоком дифференциального гидроцилин дра 10, выполняющего функции распредели . Полость 11 дифференциа:льного гидроцилиндра соединена с линией нагнетания гидромотора 12 погрузочного op-iгана, а полость 13 - с напорной линией насоса 2. Для отключения погрузочного органа при ходе Назад предусмотрен кран 14. ДТгя настройки системы по рас пределению расхода между напорными линиями гидромотора 12 погрузочного органа и гидромоторов 15 и 16 ходоьой части и давления в полости 13 предусмотрен дроссель с регулятором давлени (блок) 17. Перевод системы с автоматического (А) режима работы на ручной (Р) через положение Стоп и переключение на ход Назад при перегрузке погрузочного органа осуществляется рычагом 18. Делитель потока 19 синхронизирует режим работы гидромоторов ходовой части, а кранами 2О осуществляет ся поворот вправо и влево. Питание системы происходит от маслобака 21. Система работает следующим образом При закрытом дросселе 5 рычаг 18 ставится в положение Р, кран 7 пере7ключает поток на дроссель 6, которым рбГуаируется маневровая скорость подачи. Мащина подводится до соприкосновения со штабелем погружаемого материала. Дроссель 8 при этом открыт максимально, так как через блок 17 давление передается в ..полость 13 и передвигает пдршень влево, при этом давление в полости 11 равно нулю. После подвода машины к штабелю рычаг 18 устанавливается в положение А, причем кран 7 %йлкзчает напорную линию гидромоторов привода ходовой части и дроссель 8 автоматическоЙ системы регулирования. Дроссель 5 открывается и устанавливает необходимый расход для требуемого режима работы погрузочного органа. Поскольку блок 17 настроен на опрёделен ЙШдавление, соответствующее нагрузке на погрузочном органе при определенном давлении в напорной линии гидромотора 12, то сначала машина будет двигаться с большой скоростью на забой, так как погрузочный орган только начал внедрение, нагрузки на погрузочном органе незначительные и давление в напорной ли-. НИН гидромотора 12, а следовательно и в.полости Поменьше, чем в полости 13, при этом дроссель 8 открыт. По мере возрастания нагрузок на погрузочном органе давление в полости 11 возрастает соответственно возрастает и усилие, действующее на поршень дифференциального гидроцилиндра со стороны полости 11. В критический момент оно превышает усилие, действующее на поршень со стороны полости 13, и смещает поршень вправо. Шток гидроцилиндра, смещаясь вправо, воздействует посредством механической передачи 9 на дроссель 8, уменьшая таким образом подачу масла в напорную магистраль гидромоторов привода ходовой части, и уменьшает скорость подачи машины. При равенстве усилий, действующих на поршень со Стороны полостей 11 и 13, наступает период динамического равновесия. При возрастании давления в полости 11 выше критического {давление в полости 13 постоянно) поршень смещается вправо, и дроссель 8 посредством механической передачи 9 уменьшает подачу в напорную магистрали ходовой части до определенной минимальной величины,, в крайнем правом положении поршня поток масла реверсируется, шток поворачивает рычаг 18 из положения А в положение Р, В этот момент машина отводится от штабеля со скоростью, определяемой расходом масла через дросьсель 6, настройка которого производится оператором из условия скорости отвода. . После устранения причин превышения давления в напорной магистрали гидромотора 12 и снижения давления в полости 11 поршень смешается влево, рычаг 18 устанавливается в папон ёние А, кран 7 включает линию дросселя 8, и машина опять работает в автоматическом режиме подачи. Маневровые операции осуществляются следующим образом. Ход вперед осуществляется при закрытом дросселе 5 и при переключении рычага в положение Р регулированием расхода дросселем 6, повороты вправо и влево - при закрытии одного из кранов 20.
Ход назад осуществляется при-. открытии дрсюселя 5 и закрытии крана 14 регулированием расхода масла в напорной магистрали гидррмоторов привода ходовой части при помощи дросселя 6.
Формула изобретения
. Гидравлическая система управления погрузочной машиной, включающая насос, Гидравлические моторы привода ходовой., части и погрузочного органа,, соединенные параллельно, управляющее устройство, выполненное в .виде дифференциального гидроцилиндра, и регулируемого
дросселя, отличающаяся тем, что, с целью автоматического регулирования скорости подачи машины в зависимости от нагрузки на погрузочном органе, одна из полостей дифференциального гидравлического цилиндра включена параллельно в напорную линию гидромогора привода погрузочного органа, а. другая - в напорную инию насоса через регулятор давления и дроссель, установлекный в напорной линии гидромотора ходовой части, при этом шток дифференциального гидроцилиндра и дроссель связаны между собой посредством механической передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочная машина | 1975 |
|
SU600307A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2097569C1 |
| СИЛОВОЙ ГИДРАВЛИЧЕСКИЙ БЛОК ПИТАНИЯ МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2277188C2 |
| Погрузочная машина | 1983 |
|
SU1157267A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| Одноковшовая погрузочная машина | 1982 |
|
SU1071714A1 |
| Гидропривод транспортного средства | 1983 |
|
SU1171374A1 |
| Устройство управления грузоподъемным краном | 1980 |
|
SU965966A1 |
| Гидрообъемная передача для самоходных горных машин с четырьмя ведущими колесами | 1984 |
|
SU1239313A1 |
| Устройство для управления машиной с режущим рабочим органом | 1976 |
|
SU652280A1 |
