5
СП Ю
О5
гг
Изобретение относится к горному оборудованию и может быть использовано в горнодобьшающей, угольной , -химической, строительной и других областях промышленности.
Известна погрузочная машина, содер жащая рабочий орган, выполненный в ваде нагребающих лап, гидромотор привода которых имеет сливную линию с регулируемым дросселем, общую с одним из двух параллельно включенных гидромоторов гидромеханического дифференциала Привода ходовой части, электродвигатель с насосами и перегрузочный конвейер с приводом, при .этом гидромотор привода ходовой части имеет сливную линию с управляемым дросселем 1 3.
Недостатком этой машины является невозможность поддержания постоянной производительности при ее перемещениив зависимости от нагрузки на нагревающие лапы и приемный конвейер, так как величина нагрузки и характер ее изменения не согласуются с производительностью машины.
Наиболее близкой к изобретению является погрузочная машина, содержащая нагребающие лапы, конвейер, ходовую часть с движителями, гидронасосы их привода, механизмы регулирования скоростей нагребающих лап, конвейера и хода движителей и гидромоторы привода ходовой части,конвейера и нагребаиадих лап, сообщенные с напорными линиями гидронасосов Cz,
Однако в известной машине не предусмотрена возможность поддержания постоянства ее производительности в зависимости от перемещения нагребающих лап машины и нагрузки на приводе конвейера, которая ни по величине, ни по характеру изменения не взаимосвязана с производительностью. Нагрука привода конвейера (скребкового) формируется от воздействия изменяющихся сопротивлений движения тяговог органа и закрепления цепи со звездочкой. От неравномерности движения цепного тягового органа, вызьшаемого периодическим изменением мгновенного радиуса навивки на ведущую звездочку динбииическая составляющая через определенный период изменяет нагрузку в приводе конвейера независимо от маесы перемещаемого конвейером груза.
Калсдая из составляющих сопротивлений движению тягового органа может
изменить нагрузку до максимальной ее величины. Нагрузка на приводе конвейера не может быть принята в качесве основополагающего автоматического поддержания постоянной производительности машины. Поэтому в данной погрузочной машине ее производительность или другой параметр, функционально зависимый от производительности, не контролируется и не может поддерживаться постоянньм. При этом дроссельное регулирование, принятое в гидросхеме данной машины, имеет низкий КП а при повьш1енной мощности привода дроссельное регулирование экономически нецелесообразно.
Целью изобретения является повышение производительности машины и снижение ее энергоемкости.
Эта цель достигается тем, что в погрузочной машине, содержащей нагребающие лапы, конвейер, ходовую часть с движителями, гидронасосы их привода, механизмы регулирования нагребающих лап, конвейера и хода движителей и гидромоторы привода ходовой части, конвейера и нагребающих лап, сообщенные с напорными линиями гидронасосов, механизмы регулирования скоростей перемещения нагребающих лап , хода движителей и конвейера выполнены в виде гидроцилиндров их управления с подпружиненными поршнями, поршневые полости которых сообщены с напорными линиями гидронасосов привода ходовой части, нагребающих лап и конвейера,при этом поршень гидроцилиндра управления хода движителей вьшолнен двуступенчатым с равными площадями ступеней, а насосы привода нагребающих лап, конвейера и хода движителей выполнены регулируемыми ло производительности с регулировочными органами, которые связаны со штоками гидроцилиндров управления.
Такое вьтолнение машины позволяет обеспечить автоматическую регулировку скоростей нагребаюпцсс лап, конвейера и ходовой части в зависимости от сопрртивления их движению.
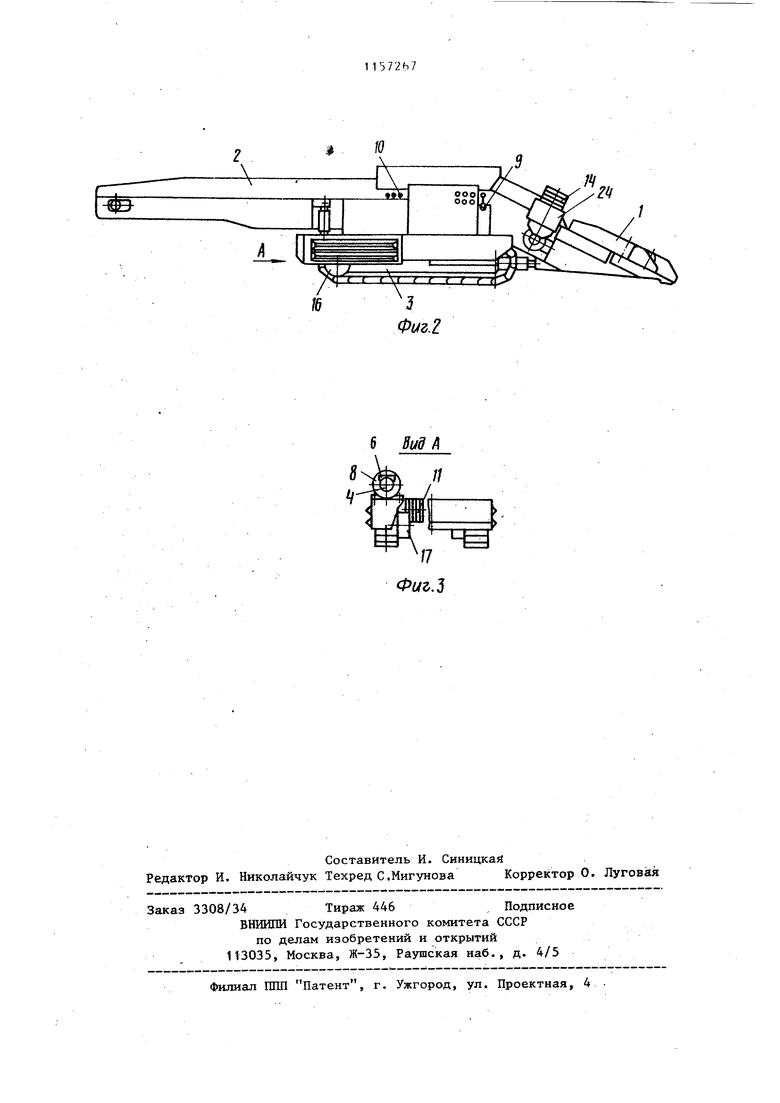
На фиг. 1 и 2 представлена погрузочная машина; на фиг. 3 - вид А на фиг. 2,
Погрузочная машина содержит рабочий орган в виде нагребающих лап 1, конвейер 2 и ходовую часть с движителями 3. Гидропривод мапшны содержит регулируемые по производительности насосы 4 и 5, связанные с гидроцилиндрами 6 и 7 управления и электродвигателями 8. Привод машины имеет гидроблоки 9 и 10 управ ления с распределительной и предох нительной аппаратурой, посредством которой осуществляется управление гидромоторами 11 - 14 привода, соот ветственно ходовой части (движителей) J нагребающих лап и конвейера. Гидромоторы 11 и 12 кинематически связаны с приводными звездочками 15 и 16 движителей через одноступе чатые цилиндрические редукторы 17 и 18, а гидромоторы 13 и 14 связан с кривошипами 19 и 20 нагребающих лап через цепные передачи 21 и 22. Нагребаювще лапы соединены между собой с помощью цепных передач, одноступенчатых конических редукторов 23 и 24 и вала 25 синхрониза ции, на котором закреплена приводная звездочка 26 скребковой цепи конвейера. Поршневая полость 27 гидроцилиндра 7 управления сообщена с помощью линии 28 управления с напорной линией 29 насоса 5. Полости 30 и гидроцилиндра 6 управления сообщены линиями управI ления 32 и 33 с соответствующими н I порными линиями 34 и 35 спаренных насосов 4. Пружины 36 и 37, размещенные Ьнутри гидроцилиндров 6 и 7, являются чувствительными элементами механизма регулирования скорости. Управляющие органы 38 гидронасосов связаны со штоками 39 гидроцилиндров управления. Гидроцшшндры 6 и являются исполнительными.элементам механизма регулирования скорости и нагружены давлением Р нагрузки, .противодействующим усилию пружин 3 и 37, стремящих удерживать механиз |Имеющие рабочие объемы насосов 4 и в положении максимальной производи тельности. Характеристика пружин 36 и 37 выбирается таким образом, что пере щение штока гидроцилиндров 6 и 7 управления обеспечивает изменение . производительности насосов по усло близкому к . 2PQ const, где2 - число потоков; Р - давление нагрузки от гусеничного двигателя; Q - производительность потока. Для насоса 5 необходимо, чтобы его про1 водительность соответствовала усЖзвию const, где Р - давлени е нагрузки от нагребающих лап и конвейера; Q - производительность насоса. Требуемое соотношение заданных .мощностей в различных условиях эксплуатации машины с целью обеспечения взаимосвязи между скоростями нагребающих лап и перемещением машины достигается регулированием затяжки пружины управляемого гидроцилиндра 6. Погрузочная машина работает следующим образом. Под действием тяговых движителей 3 ходовой части машина внедряется в навал горной массы. При этом нагрузка на привод лап конвейера и движителей ходовой части возрастает, что приводит к снижению скорости привода. Лапы отделяют часть горной массы от навала и нагребают ее на конвейер, который перемещает массу в транспортное средство. По мере забора горной массы из навала и разрушения лапами уплотненной горной массы, находящейся перед рабочей кромкой носка заборной части, нагрузка на приводе уменьшается, что приводит к увеличению скорости привода и автоматическому ее регу.пированию. В связи с тем, что регулируемый гидропривод автоматически поддерживает заданную мощность, средние скорости перемещения нагребающих лап и цепи конвейера в реальных, условиях эксплуатации машины выше примерно на 25-30%, чем нерегулируемого привода, что соответствует повЕЛпению производительности машины примерно на 25-30%. Причем в сравнении с известным техническим решением объемное регулирование позволяет повысить также КПД привода машины примерно на 40%, что значительно снижает ее энергоемкость. Ожидаемый экономический эффект в расчете на 100 машин составляет ориентировочно около 1,5 млн.руб.
Фиг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочная машина непрерывного действия с боковым захватом | 1976 |
|
SU605990A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2097569C1 |
| Погрузочная машина | 1975 |
|
SU600307A1 |
| Погрузочная машина | 1984 |
|
SU1208277A1 |
| Гидросистема проходческого комбайна | 1980 |
|
SU1073452A1 |
| ПОГРУЗОЧНАЯ МАШИНА С НАГРЕБАЮЩИМИ ЛАПАМИ | 1972 |
|
SU420793A1 |
| Погрузочная машина с нагребающими лапами | 1981 |
|
SU977829A1 |
| Погрузочно-зачистной агрегат | 1991 |
|
SU1809120A1 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |
| Погрузочная машина | 1982 |
|
SU1084468A1 |
ПОГРУЗОЧНАЯ МАШИНА, содержащая нагребающие лапы, конвейер, ходовую часть с движителями, гидрорасосы их привода, Механизмы регулирования скоростей нагребающих лап, конвейера и хода движителей и гидромоторы привода ходовой части, конвейера и нагребающих лап, сообщенные с напорными линиями гидронасосов, отличающаяся тем, что, с целью повышения производительности машины и снижения ее энергоемкости, механизмы регулирования скоростей нагребающих лап, хода движителей и конвейера вьтолнены в виде гидроцилиндров с подпружиненными поршнями, поршневые полости которых сообщены с соответствующими напорными линиями гидронасосов привода ходовой части, нагребающих лап и конвейера, при этом поршень цилиндра хода движителей выполнен двуступенчатым с равными , площадями ступеней, а насосы привода нагребаювщх лап, конвейера и хода (Л движителей выполнены регулируемыми по производительности с регулировочными органами, которые связаны со штоками соответствующих гидроцилиндров.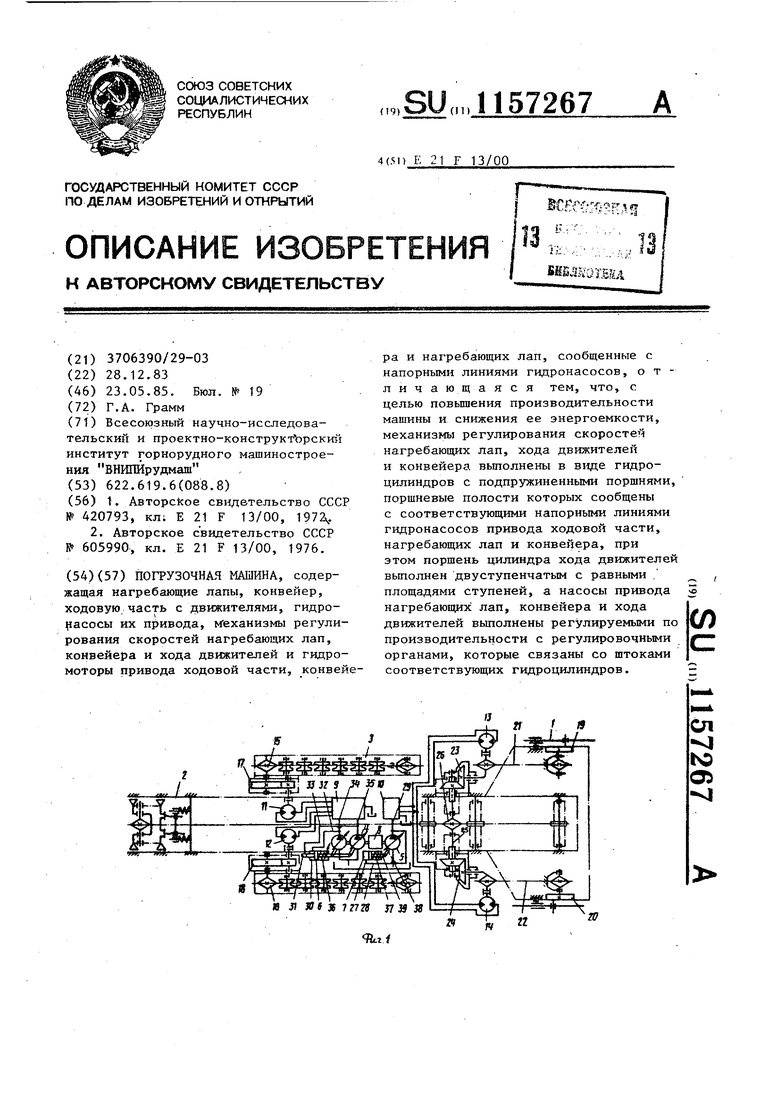
| t | |||
| ПОГРУЗОЧНАЯ МАШИНА С НАГРЕБАЮЩИМИ ЛАПАМИ | 1972 |
|
SU420793A1 |
| Погрузочная машина непрерывного действия с боковым захватом | 1976 |
|
SU605990A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
