Изобретение относится к вычислительной технике и предназначено для оперативного управления многообъектными комплексами, состояи имк яз объектов погрузки, разгрузки и автотранспортных средств.
Изобретение может быть кспо.эьзовано для управления горнотранспортными работами на карьере, а также другими работами в течение смены, когда существует объективная необходимость определения оптимальных маршрутов к объектам погрузки или разгрузки и решения задачи усреднения составов транспортируемых материалов, например, руды, шихты и т. д.
Известны устройства для передачи к приема информации, содержащие на контролируемых пунктах приемо-передающие блоки и датчики, на диспетчерском пункте блок памяти, блок выбора маршрута, блок индикации и блок управления (j.
Недостатком известных устройств ямяется низкая эффективность управления объектами, обслуживаемыми данными устройствами.
Наиболее близким к изобретению по технической сущности является устройство для передачи и приема информации о погрузочных и транспортных единицах, содержащее
2.
на каждом контролируемом пункте датчики информации о трансаортных едиккцах. подклкченные к приемо-передающему блоку, один .выход которого подключе 5 к. индикатору, другой к.одному концу линии связи, другой конец которой соединен с пряемо-. передающим блоком диспетчерского пункта, содержащего блок управления, первый вы- . ход которого соединен с управляющим зкодом регистра, один выход которого подключен к первым входам вычислительного блока и блока учета работы объекта, выход
которого соединен с первым входом блока
Н днкац1 И, блок определения состояния обьекта и блок контроля (2....
Среди недостатков известного устройства отмечены такие, как низкая эффективность управления распределением транспортной cAHFnmu под погрузочной единицей, поско.гьку пункт погрузки транспортного средства (номер погрузочной единицы) определяет-ся в пунктах разгрузки, расстояние меж-,
ду которыми нередко составляет 5-10 .км. При этом для решения задачи выбора оп-тигйлльного маршрута (равномерной загрузкн всех работающих экскаваторов) анализируется ситуация, сложившаяся в пунктах погрузки на данный мамент {степеньзагрузки г О рузочной единицы). Однако за время следования транспортной единицы от пункта разгрузки к пункту погрузки, которое нередко превыигает 30 минут, ситуация на объектах изменяется и быть простои автосамосвалов п очереди у погрузочных единиц (экскаваторов) g простои экскаваторов из-за отсутствия транспортных единиц (самосвалов).
Отмечается и низкое быстродействие устройства, обусловленное наличием трех режимов работы.
Прежде чем будет выдан маршрут следования транспортной единице, находящейся на контролируемом пункте (КП) с порядковым номером N, устройство осуществляет последовательный опрос всех КП пунктов, выдает ситуацию на объектах и маршрут следования автомобилям, находящимся ; на КП с 1 по . При этом режимы выдачи ситуации на объектах и оптимального маршрута следования связ-аны с индикацией и должны длиться для каждого КП значительное время, достаточное для визуальной оценки индицируемой информации. Таким образом, возможны простои автосамосвалов в ожидании маршрута следования.
Недостатком является и аппаратурная избыточность устройства,связанная с необходимостью хранения учетной информации о количестве погруженных (разгруженных) самосвалов и Их номере на каждом КП. Это обусловлено тем, что опрос КП происходит через промежутки времени, за которые может быть произведена погрузка (разгрузка) одного или нескольких самосвалов.
Устройство не позволяет решать задачу усреднения химического состава руды, доставляемой самосвалами на обогатительную фабрику.
Кроме того, необходим опрос всех КП в каждом цикле, независимо от того, изменилась ли на них ситуация и имеется ли оперативная и учетная информация.
Низка помехозащищенность приемо-передаюилих блоков, обусловленная использованием для этой цели радиоаппаратуры, сложна аппаратура декодирования принятой ин формации.
Целью изобретения является повышение быстродействия устройства.
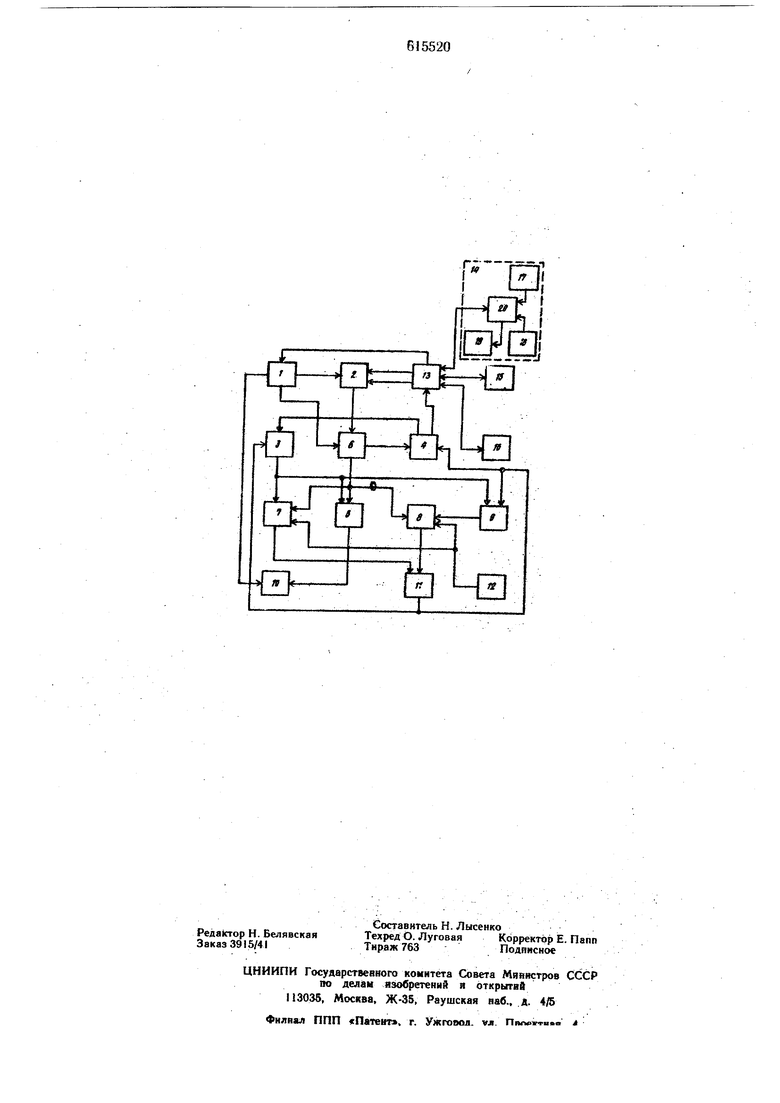
Эта цель достигается тем, что в устройство на диспетчерском пункте введены формирователь команд, блок загрузки погрузочной единицы, блок выбора маршрутов, блок усреднени.я значений и блок памяти, входы которого подключены ко второму выходу блока управление и к первым выходам приемо-передающего блока, второй выход которого соединен со входом блока управлекия, третий выход блока управления подключен ко второму входу блока индикации, выход блока памяти соединен с информационным входом регистра, второй выход которого подключен к первому входу формирователя команд, выходы которого соедмнеиы соответственно со входом Г1)немопередающего блока первым входом блока KOHTpoj.H, выход которого подключен к первым входам блока усреднения значений и блока загрузки погрузочной единицы и ко BTOpofity входу блока учета работы объекта, выход регистра соединен со вторым входом блока усреднения значений, выход которого и выход вычислительного блока подключены ко входам блока выбора маршрута, пыход которого соединен со вторыми входами блока контроля, формирователя команд и блока загрузки погрузочной единицы, выход блока определения состояния объекта соединен с третьим входом блока усреднения значений и вторым входом вычислительного блока, третий вход которого подключен к выходу блока загрузки погрузочной единицы.
Блок-схема устройства приведена иа чертеже. , Устройство содержит блок управления, соединенный с блоком 2 памяти, блок 3 контроля, подключенный к формирователю 4 команд и блоку 5 .учета работы объекта, регистр 6, блок 7 усреднения значений, вычислительный блок 8, блок 9 загрузки погрузочной единицы,блок 10 индикации, блок И выбора маршрута, блок 12 определения состояния объекта, приемо-передающий блок 13, контролируемые пункты 14, 15, 16, датчики 17, 18 информации, индикатор 9 приемо-передающий блок 20.
Устройство работает следующим образом.
Контролируемые пункты (КП) 14, 15, 16 расположены на пути следования транспорт-, ных единиц при въезде на КП 14, выезде с КП: 15 и перед развилкой дорог на обогатительную фабрику и усреднительный склад КП 16. Порожний самосвал проходит КП 14, где датчик информации 17 (блок считывания номера самосвала, выполненный, например, в виде фотодатчиков) считывает код гаражного номера самосвала с носителя информации, выполненного, например, в виде решетчатой конс1;рукции, а датчик 18 информации определяет вес порожней транспортной единицы: Информация-о номере транспортной единицы и ее весе поступает в приемо-передающий блок 20, который по проводной линии связи (например, по телефонной паре) передает ее на приемо-передающий блок 13 диспетчерского пункта. Принятая блоком 13 информация запоминается блоком 2, после чего по сигналу блока 13 запускается блок 1, который управляет обработкой принятой информации. По его сигналам она считывается из блока памяти 2 в регистр б, где разделяется по видам сообщения. Далее информация КП 14, записанная в регистреб, обрабатывается следующим образом. Вес порожней транспортной единицы записывается в блок 5 учета работы объекта, который ведет учет груза, перевезенного каждой транспортной единицей, отгруженного каждой погрузочной единицей, а также производительногть карьеру и обсиатительной (()абрикн. Пи сигиулу регистра 6 запускается BBIчисл|1тельный 6л(к 8, котор1 гй определяет маршрут движения автосамосвала с точки зрения ()авяпмериои загрузки 1юг)узочн()й единицы. При этом блок 8 оперирует информацией блока 12 состояния объекта и блока 9 загрузки HOt-pyaoUiOH еди11Н 1ы. Блок 12 состояния об1)екта представляет собой регистр с числом разрядов, равным количеству объектоБ (пунктов погрузки экскаваторов и пунктов разгрузки). Если объект находится 8 рабочем состойиии, в соответствующем разряде регистра выставляется единица, если объект вышел из строя - нуль. Блок 9 загрузки ггогрузочной единицы вьрполнен также 3 виде регистра, в соответствующих раЗ рядах которого записано число самосвалов, л аправленных под каждый экскаватор. Вычислительный блок 8 .считывает информацию из блока 9 о погрузочных единицах, у которых в соответствующих разрядах блока 12 состояния объекта находятся единицы, т. е. о загрузке работающих погрузочных единиц. Затем блок 8 выбирает погрузочную единицу, к которой направлено меньше всего машин и выдает его номер в блок 11 выбора маршрута. Если окажется несй(олько погрузочных единиц, к которым направлено одинаковое минимальное количество транспортнБ1х единиц, блок 11 выбирает один из них, например, с меньшим порядковым номером. Номер выбранной погрузочной единицы с блока 11 передается в формирователь команд 4, где к нему из регистра б добавляется номер транспортной единицы, прошедшей КП 14. Коды номера транспортной единицы и номера погрузочной единицы, под которую она направлена, из блока 4 через приемо-передающий блок 13 передается па приемо-передающий блок 20 контролируемого пункта 14, который индицирует их на индикаторе 19. Номер погрузочной единицы, к которому H npaBvieHa транспортная единица, с блока 11 поступает в блок 9 загрузки погрузочной единицы, где к количеству транспортных единиц, направленных под данную погрузочную единицу, добавляется единица. Номер транспортной единицы и номер погрузочной единицы, под которую она направлена, с формирователя 4 команд записывается также в блок 3 контроля. Груженая транспортная единица при выезде из карьера проходит КП 15, где считывается ее номер, определяется вес груженой транспортной единицы и передается через приемо-передающий блок 20 на приемо-передающий блок 13. Отсюда сигналами блока 1 управления через блок памяти 2 информация переписывается в регистр 6. Далее информация КП 15 обрабатывается следующим образом. Вес груженой транспортной единицы записывается в блок 5 учета работы объекта, где из него вычитается вес порожней транспортной единицы, записанный ранее. Чистый вес транспортируемой руды добавляется к весу, перенезенномуданной единицей, погруженному Г1огру:ии;кой единицей (номер), к которой была направлена данная транспортная единица, считывается из блока 3. Номер транспортной единицы с регистра 6 считывается также в блок 7 усреднения значений, куда из блока 3 контроля считывается пункт погрузки данной транспортной единицы (номер погрузочной единицы). По пункту погрузки блок 7 определяет род транспортируемого груза (вскрыЩа или полезное ископаемое). В зависимости от вида груза блок 11 выбора маршрута определяет пункт разгрузки (бункера обогатительной фабрики и усреднительный склад или отвал). Код пункта разгрузки из блока 11 поступает в формирователь команд 4, где к нему из регистра 6 добавляется код номера транспортной единицы. Далее информация о номере .транспортной единицы и пункте разгрузки через приемо-передающий блок 13 поступает на приемо-передающий блок 20 КП 15 и индицируется на индикаторе 19. Номер погрузочной единицы, загру-зившей погрузочной единицы, из блока контроля 3 поступает в блок 9 загрузки погрузочной единицы, где число транспортных единиц, направленных к данной погрузочной единице, уменьшается на единицу. В случае, когда транспортная единица транспортирует «вскрышу и направлена для разгрузки в отвал, информация о номере транспортной. единице с фор.мирователя команд 4 поступает в блок контроля 3 и из последнего исключается информация о данной транспортной единице. Если же транспортное средство транспортирует полезное ископаемое, оно направляется на КП 16, где считывается ее номер и определяетс.я вес. Полученная информация через приемо-передающие блоки 20 и 13 и блок памяти 2 записывается в регистр 6 и обрабатывается следующим образом. В блок 7 усреднения значений из регистра 6 считывается номер и вес транспортируемой ей руды, из блока 12 состояния объекта - состояние пунктов разгрузки, а из блока 3 контроля движения - пункт погрузки транспортной единицы, по которому определяется химический состав руды. Далее блок усреднения значений решает алгоритм усреднения для каждого пункта разгрузки (бункеры обогатительной фабрики, штабели усреднительного склада), у которых в соответствующих разрядах блока 12 состояния объекта записаны единицы. При этом блок 7 усреднения значений определяет пункт разгрузки, в котором усредненный химический состав не выйдет из допустимых пределов после разгрузки руды, транспортируемой транспортной единицы-. Если таких пунктов окажется несколько, блок И выбора маршрута выбирает один из них с высшим приоритето.м (бункер обогатительной фабрики с меньшим запасом ру.ды, формируемый щтабель усреднитольного склада) Код пункта разгрузки поступает с блока I1 в формирователь команд 4, где к нему из регистра 6 добавляется код номера транспорт. ной единицы. Далее информация о номере транспортной единицы и пункте разгрузки через приемо-передающий блок 13 поступает на приемо-передаюший блок 20 КП 16 и нндицнруется на индикаторе 19. Номер самосвала с формирователя команд 4 поступает также в блок контроля 3, где из последнего исключается информация о данной транспортной единице. Когда одновременно на нескольких КП будут находиться транспортные единицы, передаваемая ими информация запоминается блоком памяти 2 и далее обрабатывается по командам блока I либо в порядке noctynления, либо (если информация принята одновременно) в порядке возрастания номеров КП. Результат обработки информации для каждого КП (адрес следования транспортной единицы) запоминается приемо-передающим блоком 20 на время, достаточное длгя его визуальной оценки, а устройство переходит к обработке информации следующего КП. рели какой-либо объект меняет свое состояние выходит из строя или начинает работать), блок 12 определения состояния объекта изменяет значение соответствующего разряда регистра. Результаты работы самосвалов, экскаваторов, карьера и обогатительной фабрики из .блока 5 учета работы объекта по команде блока I управления могут быть выведены на индикацию и оформлены документально посредством блока 10 индикации. Таким образом, дополнительное введение в устройство блока 2 памяти, блока 7 усреднения значений, блока 9 загрузки погрузочной единицы, блока 11 выбора маршрутов на диспетчерском пункте, а также датчика 17 информации о номере транс портной единицы и датчика 18 о весе на КП совместно с другими блоками и их связями, исключение из устройства радиопередающей аппаратуры, а также селектора импульсов позволяет повысить эффективность :,распределения автосамосвалов или экскаваторов, повысить быстродействие и упростить устройство, выполнить задачу усреднения химического состава руды, доставляемой автосамосввлами на обогатительную фабрику, повысить помехозащищенность устройства. Формула изобретения Устройство для передачи и приема информации о погрузочных и транспортных единицах, содержащее на каждом контролируемом пункте датчики информации о транспортных единицах, подключенные к приемопередающему блоку, один выход которого подИлПючен к индикатору, другой к одному концу линии связи, другой конец которой соеднкен, с приемо-передающим блоком диспетчерского пункта, содержащего блок управления, первый выход которого соединен с управляющим входом регистра, один выходкоторого подключен к первым входам вычислительного блока и блока учета работы Объекта, выход которого соединен с первым входом блока индикации, блока определения состояния объекта и блок контроля, отличающееся тем, что, с целью повышения быстродействия устройства, в него введены на диспетчерском пункте формирователь команд, блок загрузки погрузочной единицы, блок ..выбора маршрутов, блок усреднения значений и блок памяти, входы которого подключены ко второму выходу блока управления и к первым выходам приемо-передающего блока, второй выход которого соединен со входом блока управления, третий выход блока у правлена я подключен ко второму входу блока индикации, выход блока памяти соединен с информационным.входом, регистра, второй в а1ход которого подключен к первому входу формирователя команд, выходы которого соединены соответственно со входом приемо-передающего блока и первым входом блока контроля, выход которого подключен к первым входам блока усреднения значений и блока загрузки погрузочной единицы и ко второму входу блока учета работы объекта, выход регистра соединен со вторым входом блока усреднения значений, выход которого и выход вычислительного блока под и1 Очены ко входагл блока выбора маршрута, выход которого соединен со вторыми входами блока контроля, формирователя команд и блока загрузки погрузочной единицы, выход блока определения состояния объекта соединен с третьим входом блока усреднения значений и вторым входом вычислительного блока, третий вход которого подключен к выходу блока загрузки погрузочной единицы. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство .СССР № 442506, кл. G 08 С 19/12, 1972. 2.Авторское свидетельство СССР № 485457, кл. G O6F 15/46, 1973.
-:.-П.Л

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Система для управления и контроля работы погрузочно-транспортных средств | 1975 |
|
SU516074A1 |
| Устройство для управления подвижными и рассредоточенными объектами на карьере | 1973 |
|
SU485457A1 |
| СПЕЦИАЛИЗИРОВАННОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОТРАНСПОРТНЫМИ РАБОТАМИ | 1973 |
|
SU368612A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство контроля равномерности подачи слитков к нагревательным колодцам | 1985 |
|
SU1294685A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| Устройство для контроля погрузки транспортных средств | 1977 |
|
SU708379A1 |