рушения нормальной электрической связи между ними.
Одним из решений задачи гибкой связи между системами или какими-либо другими источниками переменного тока является построение устройства с нрименением асиихронизироваииой синхронной машины в частности для гибкой связи трехфазной сети 50 Гц и однофазной сети 16 % Гц.
Это устройство содержит однофазную сиихронную машину и асиихроннзированиую синхронную машниу, валы которых жестко соединены.
Для осуществления асиихроиизированной сиихронной гнбкой связи сетей ротор питается от управляемого преобразователя частоты.
Постояиство определенного значения передаваемой мошностн в указанном днапазоие скольжения между сетями достигается соответствуюшим управленнем преобразователя. При уменьшенной частоте врашения агрегата некоторая величина активной мошиости должка быть отведена через контактные кольца АСМ в сеть 50 Гц, при повышенной частоте врашения соответственно наоборот. Для преобразователя частоты это означает, что он должен в зависимости от обстоятельств работать выпрямителем или инвертором.
Недостатком устройства является нерациональное использование свойств машии каскада. Действительно, синхронная машина (СМ) включена в сеть с худшим качеством электроэнергии (16 Va Гц), а асинхронизированиая синхронная машина (АСМ) включена в сеть стабильной частоты (50 Гц). Как известно, при прочих равных условиях качество напряжения СМ лучше, чем у АСМ (у АСМ возбуждение осушествляется по двум осям). Это означает, что не задается сохранить хотя бы один источиик с высоким качеством электроэнергии.
Асинхронная машина с фазным ротором и тиристорным преобразователем частоты ухудшает качество энергии в сети со стабильной частотой (50 Гц), так как на практике не удается создать идеально симметричную систему обмоток на роторе, следствием чего является появление в сети токов обратной носледовательности.
Кроме того, так как валы машины электро.механического преобразователя соединены жестко, суммарная инерциоиная постояииая роторов возрастает.
При быстром изменении частоты в сети 16 Vs Гц (сеть с большим диапазоном отклонений частоты) синхронная машина ухудшает качество энергии и тем больше, чем больше суммарная инерционная каскада в целом, так как роторы не успевают изменять свое пространственное положепие в соответствии с полем статора синхронной машины.
При указанном выше подключении машин электромеханического преобразователя его свойства )Зуются не оптимально.
Цель изобретения - улучшение качества передавае.мой электроэнергии.
Это достигается тем, что в предлагаемом устройстве, содержащем синхронную машину и асиихроиизированную синхронную машину, сиабженггую управляемым преобразователем
частоты н регулятором, одни из входов которого соединен с датчиком частоты системы неремениого тока, к которой подключена асиихронизироваиная синхронная машина, а выходы нреобразователя частоты соединены
с обмотками ротора последней, статорные обмотки сиихронной машииы иодключены к системе неремеииого тока стабильной частоты, статориые обмотки асинхронизированной синхронной машины - к системе перемеииого
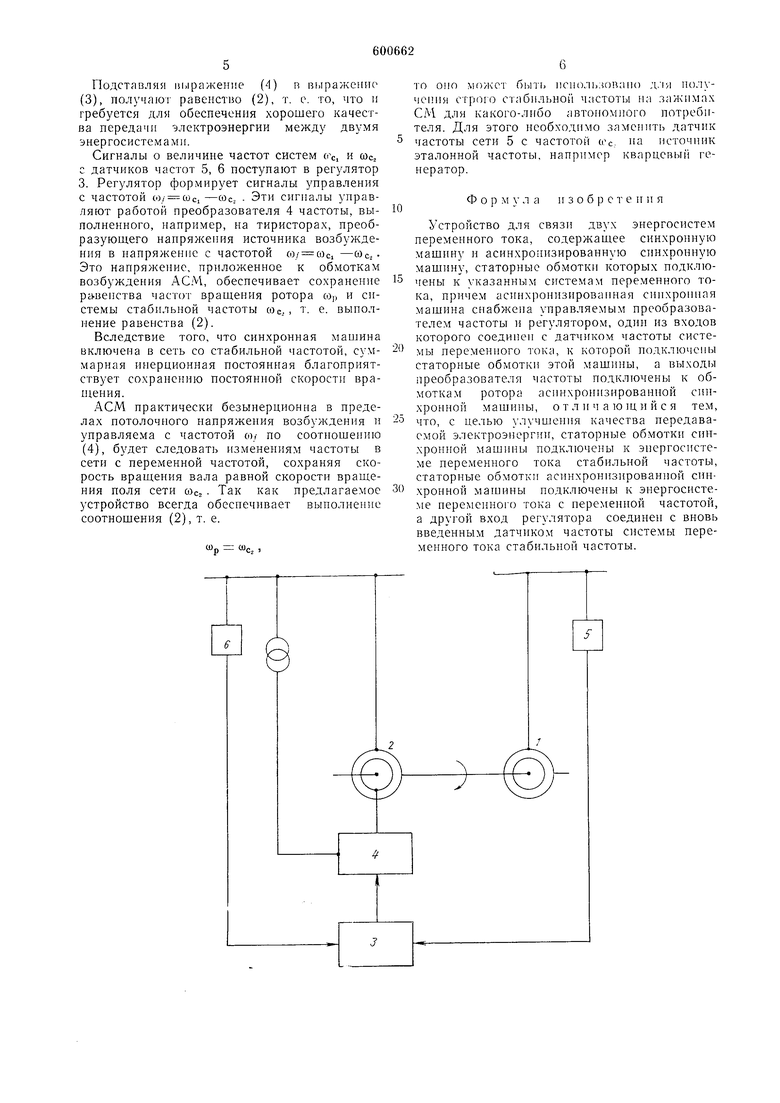
тока с неремениой частотой. Другой вход регулятора асинхроннзнрованной сиихронной машины соединен с датчиком частоты системы неременного тока стабильной частоты. На чертеже показана блок-схема.
Устройство содержит синхронную машину
1,асинхронизированную синхронную машину
2,регулятор 3 АСМ, управляемый преобразователь 4 частоты АСМ, датчики 5 частоты системы со стабильной частотой, датчик 6
частоты системы с переменной частотой.
Статорные обмотки синхронной машины 1 соединены с энергосистемой со стабильной частотой. Статорные обмотки АСМ 2 соединены с энергосистемой с переменной частотой.
Входы регулятора 3, нредиазиаченного для формнровання сигналов управления работой преобразователя 4 частоты, соединены с датчиками частоты 5 и 6 обеих систем
(cDci и (Ос, ). Выход регулятора 3 соединен с преобразователем 4 частоты, преобразующим напряжение источника возбуждения в напряжение требуемой частоты. Выход преобразователя 4 частоты соединен с роторными обмотками АСМ 2.
Полагаем, что диапазон изменения частоты второй системы (cocj ) значительно меньше, чем первой системы (cocj ), т. е.
А-с. «Ашс.(1)
поэтому вторую систему (сос, ) будем считать источником со стабильной частотой.
Известно, что свойства каскада, содержашего синхронную машину, определяются последней. Г1оэтому качество энергии, которой обмеииваются системы, определяется тем, как стабильиа скорость врашения роторов каскада шр, т. е. равенством
Шр сОе, .(2)
Скорость врашения АСМ 2
с, - 0f.(3)
При этом частоту напряжения возбуждения формируют в регуляторе 3 как
ш/ We, - , .(4)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем переменного тока | 1978 |
|
SU752611A1 |
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| АСИНХРОНИЗИРОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1990 |
|
RU2020689C1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистемпЕРЕМЕННОгО TOKA | 1979 |
|
SU807442A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
| Устройство для электропитания потребителей | 1983 |
|
SU1095308A1 |
| Устройство для связи энергосистем | 1980 |
|
SU936209A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1557626A1 |
