1
Изобретение относится к электро энергетике, а именно к устройствам повышения устойчивости и надежности работы объединенных энергосистек путем объединения систем гибкими связями, обеспечивающими возможность их параллельной работы при различных частотах.
Известны различные устройства для связи энергосистем переменного тока на базе асинхронизированных синхронных машин (АСМ), в частности устройство для связи двух энергосистем, содержащее две асинхронизированные синхронные машины с жестко объединенными валами, роторные обмотки машин соединены между собой с противоположным чередованием фаз и к общим точкам их соединения подключены выходы управляемого преобразователя частоты 1.
Известно также устройство для объединения энергосистем, состоящее из объединенных общим валом
двух АСМ, каждая из которых снабжена автоматическим регулятором 23. Наиболее близким по технической сущности к изобретению является устройство для гибкой связи энерго5 систем, содержащее две АСМ с жестко соединенными валами, статорные цепи которых подсоединены каждая к своей энергосистеме, к которой подсоединены датчикичастоты, выходы которых
О подсоединены к блоку сравнения, а к роторным цепям каждой из машин подсоединены статический преобразователь, к которому подсоединен выход блока сравнения и датчик частот роторных цепей, и регулятор
с блоком формирования функций регулирования 3.
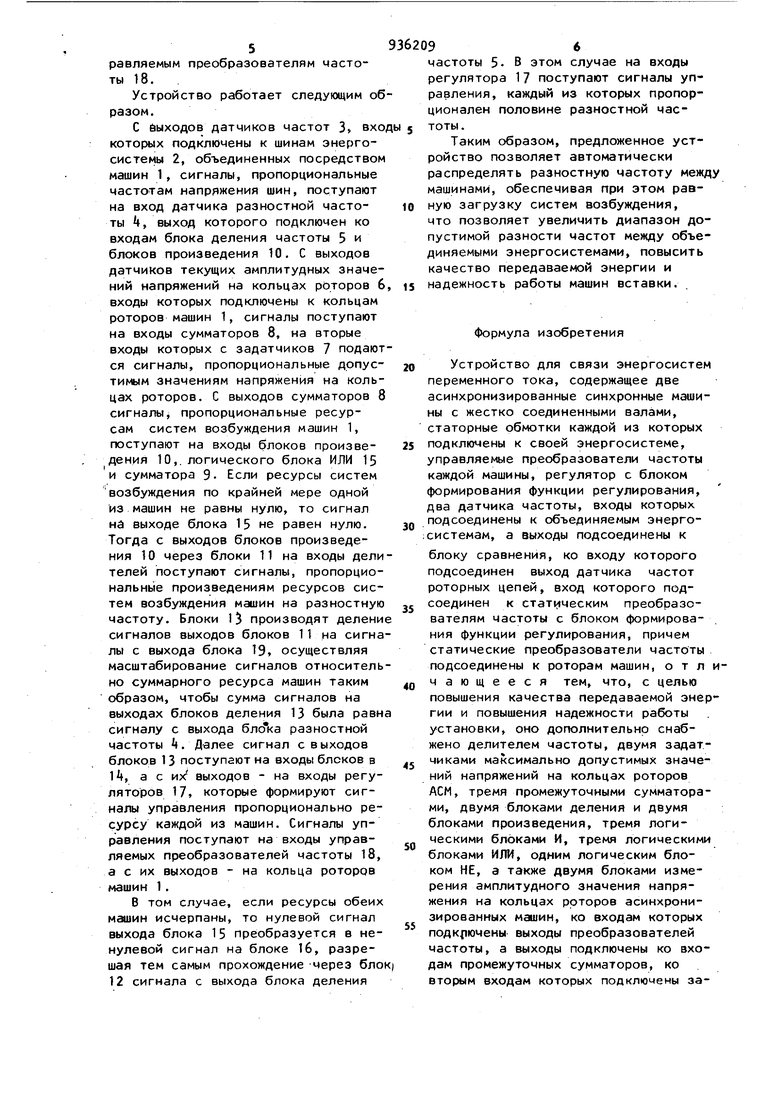
Недостаток данного устройства заключается в том, что при формировании сигналов управления не учитывается различная загрузка машин преобразователя по реактивной мощности, Формирование сигналов управления у каждой из машин с частотой, равной половине разности частот объеди няемых энергосистем, может привести к тому, что при различной загруз ке по реактивной мощности система регулирования одной из машин дости( нет потолочного значения, в то врем как другая машина еще имеет некоторый недоиспользованный ресурс в сис теме управления. Цель изобретения - увеличение до пустимой разности частот между энер госистемами, повышение качества и н дежности работы устройства. Поставленная цель достигается ,тем, что в устройство для связи эне 1госистем переменного тока, содержащ две АСМ с жестко соединенными валами, статорные обмотки каждой из которы; подключены к своей энергосистеме, управляемые преобразовател частоты каждой машины, регулятор с блоком формирования функции регулирования, два датчика частоты, входы которых подсоединены к объединяемым энергосистемам, а выходы подсоединены к блоку сравнения, ко входу которого подсоединены выход датчика частот роторных цепей, вход которого подсоединей к статическим преобразователям частоты с блоком формирования функций регулирования, причем статические преобразователи частоты подсоединены к роторам машин, дополнительно введены делитель частоты, два задатчика максимально допустимых значений напряжений на кольцах роторов АСМ, три-промежуточных сумматора, два блока деления и два блока произведения, три логических блока И, три логических блока ИЛИ, один логический блок НЕ (инвертор), а также два блока измерения амплитудного значения напряжения на кольцах роторов АСМ, ко входам которых подклю чены выходы преобразователей частоты, а выходы подключены ко входам промежуточных сумматоров, ко вторым входам которых подключены задатчик максимальных значений напряжений на кольцах роторов АСН, выходы промежу точных сумматоров подключены ко входам третьего промежуточного сумматора, а также к первым входам блоков произведений, ко вторым входам которых подключены выход блока сравнения, а выходы блоков произведений подключены ко входам ло9гических блоков И, ко вторым входам которых подключен выход логического блока ИЛИ, ко входам которого подключены выходы первых двух промежуточных сумматоров, выходы логических блоков И подключены ко входам двух блоков деления, ко вторым входам которых подключен выход третьего промежуточного сумматора, а выходы блоков деления подключены ко входам двух блоков ИЛИ, выходы которых подключены ко входам регуляторов, а ко вторым входам логических блоков ИЛИ подключен выход третьего логического блока И, к одному входу которого подключен датчик частот роторных цепей, а ко второму - выход логического блока НЕ, ко входу которого подключен выход первого логического блока ИЛИ. Предложенное устройство позволяет постоянно автоматически изменять .скорость вращения поля ротора каждой из машин так, чтобы амплитудные значения напряжения на кольцах роторов машины были равны независимо от загрузки машин по реактивной мощности. На чертеже представлена блок-схема предлагаемого устройства. Схема включает асинхронизированные машины 1, подсоединенные к шинам объединяемых энергосистем 2, на которых установлены датчики частоты 3 выходы которых подсоединены к датчику разностной частоты , выход которого подсоединен к делителю частоты 5. К выходам асинхронизированных машин 1 подсоединены датчики текущих амплитудных значений напряжений на кольцах роторов 6, причем их выходы и выходы задатчиков допустимых напряжений на кольцах роторов 7 по/; соединены к сумматорам 8 и 9, выходы которых подсоединены к блокам произведений 10, выводы которых подсоединены к логическим блокам 11 и 12, выводы которых подсоединены к блокам деления 13, выходы которых подсоединены ко входам логического блока ИЛИ Н, входы блоков произведений 10 подсоединены ко входам логического блока ИЛИ 15, выход которого подсоединен к логическому блоку НЕ 16. Выход блоков ИЛИ И подсоединен к регуляторам с блоками формирования функции регулирования 17, выводы которых подсоединены к управляемым преобразователям частоты 18. Устройство работает следующим об разом. С выходов датчиков частот 3 вхо которых подключены к шинам энергосистемы 2, объединенных посредством машин 1, сигналы, пропорциональные частотам напряжения шин, поступают на вход датчика разностной частоты , выход которого подключен ко входам блока деления частоты 5 и блоков произведения 10. С выходов датчиков текущих амплитудных значений напряжений на кольцах роторов 6 входы которых подключены к кольцам роторов машин 1, сигналы поступают на входы сумматоров 8, на вторые входы которых с задатчиков 7 подаю ся сигналы, пропорциональные допустимым значениям напряжения на коль цах роторов. С выходов сумматоров сигналы пропорциональные ресурсам систем возбуждения машин 1, поступают на входы блоков произве дения 10,. логического блока ИЛИ 15 и сумматора 9- Если ресурсы систем возбуждения по крайней мере одной из машин не равны нулю, то сигнал на выходе блока 15 не равен нулю. Тогда с выходов блоков произведения 10 через блоки 11 на входы дели телей поступают сигналы, пропорциональнь1е произведениям ресурсов систем возбуждения машин на разностную частоту. Блоки О производят делени сигналов выходов блоков 11 на сигна лы с выхода блока 19, осуществляя масштабирование сигналов относитель но суммарного ресурса машин таким образом, чтобы сумма сигналов на выходах блоков деления 13 была равн сигналу с выхода разностной частоты .Далее сигнал с выходов блоков 13 поступают на входы блоков в 1, а с их выходов - на входы регуляторов 17, которые формируют си1- налы управления пропорционально ресурсу каждой из машин. Сигналы управления поступают на входы управляемых преобразователей частоты 18, а с их выходов - на кольца роторов машин 1. В том случае, если ресурсы обеих машин исчерпаны, то нулевой сигнал выхода блока 15 преобразуется в ненулевой сигнал на блоке 16, разрешая тем самым прохождение через бло 12 сигнала с выхода блока деления 96 частоты 5- В этом случае на входы регулятора 17 поступают сигналы управления, каждый из которых пропорционален половине разностной частоты . Таким образом, предложенное устройство позволяет автоматически распределять разностную частоту между машинами, обеспечивая при этом равную загрузку систем возбуждения, что позволяет увеличить диапазон допустимой разности частот между объединяемыми энергосистемами, повысить качество передаваемой энергии и надежность работы машин вставки. Формула изобретения Устройство для связи энергосистем переменного тока, содержащее две асинхронизированные синхронные машины с жестко соединенными валами, статорные обмотки каждой из которых подключены к своей энергосистеме, управляемые преобразователи частоты каждой машины, регулятор с блоком формирования функции регулирования, два датчика частоты, входы которых подсоединены к объединяемым энергосистемам, а выходы подсоединены к блоку сравнения, ко входу которого подсоединен выход датчика частот роторных цепей, вход которого подсоединен к статическим преобразователям частоты с блоком формирования функции регулирования, причем статические преобразователи частоты подсоединены к роторам машин, отличающееся тем, что, с целью повышения качества передаваемой энергии и повышения надежности работы установки, оно дополнительно снабжено делителем частоты, двумя задатчиками максимально допустимых значений непряжений на кольцах роторов АСМ, тремя промежуточными сумматорами, двумя блоками деления и двумя блоками произведения, тремя логическими блоками И, тремя логическими блоками ИЛИ, одним логическим блоком НЕ, а также двумя блоками измерения амплитудного значения напряжения на кольцах роторов асинхронизированных машин, ко входам которых подк{1ючены выходы преобразователей частоты, а выходы подключены ко входам промежуточных сумматоров, ко вторым входам которых подключены за
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Способ управления устройством для связи двух энергосистем | 1980 |
|
SU936208A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты для связи двух энергосистем | 1986 |
|
SU1411881A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1473002A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
| Устройство для связи двух энергосистем | 1982 |
|
SU1046839A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
