Изобретение относится к электроприводам и может быть использовано в системах управления электроприводами подъемно-транспортных механизмов, например лифтов.
Известно устройство, формирующее управляющее напряжение в соответствии с заданными временньЪш функциональными зависимостями скорости и ускорення, которое соа,ержит последовательно включенные усилитель с ограничителем и интегрирующий усилитель 1. Это устройство позволяет преобразовывать быстрое пзменение входной величины в лииейно изменяющееся во времени напряжение на выходе. При этом после завершения отработки програм.мы папряжепие }ш выходе равно заданному. Схема указанного устройства сравнительно проста, однако измеиение заданного ускорения происходит ненлавно, поскольку не ограничивается значение его производной - рывка.
Из известных устройств по техннческой сущности наиболее близким к изобретению является устройство 2, в котором уровень рывка задается двумя регулируемыми источниками эталонного напряжения нротивоположной нолярности, которые переключаются в зависимости от характера движения (ускорение или замедление) с помощью обратной связи.
Заданное значенне напряжения подается на вход интегрнрующего (онерационного) усилителя, на выходе которого получается нанряженне, пронорннональное ускоре ппо. В свою очередь, это напряжение подается на вход второго интегрирующего (онерацнонного уснлнтеля, на выходе которого образуется наирялсение, соответствующее эталонно.му значению скорости в функннн временн. Величииа рывка контролируется с помощью специальной логической схемы. Недостатками оннсанного устройства являются сложность его схемы, ненлавное .изменение задання ускорения во время переходного процесса, что может быть нричиной возннкновення донолнительных колебательных процессов в электромеханнческой снстеме механизма, а также налнчне дннамнческой ошнбкн, определяемой тем, что при инерционном нр-нводе для управлення используется нанряженне, соответствующее только заданню но скорости.
Целью изобретения является упрощенне задатчнка, повыщенне точностп отработки требуемого закона движения и улучщенне качества переходного нроцесса. Поставленная цель достигается тем, что в устройство, состоящее из двух последовательно включенных ннтегрнрующнх (операцнонных) усилителей, введен донолнительный третнй ннтегрирующнй усилитель, своим входом соединеиныи со вторым интегрирующим усилителем. При этом два первых усилителя соединеиы ио схеме колебательного звена, выходной усилитель которого зашунтирован двумя нараллельными цепями из вентиля и ключевого элемента, иричем иоляриость вентилей каждой цени иротивоположна.
Кроме того, устройство содерл ит доиолнительный усилитель, нервый вход которого соединен с выходом третьего интегрирующего усилителя, а второй - с выходом второго интегрирующего усилителя.
1акое устройство дает возмол ность получить непрерывное изменение рывка в течение переходного процесса, поскольку задание ускорения изменяется в соответствии с синусной функцией. Кроме того, на выходе устройства напряжение является суммой управляющего сигнала и его производной, что позволяет повысить точность отработки требуемого закона движения. Это приводит к улучшению качества переходного процесса.
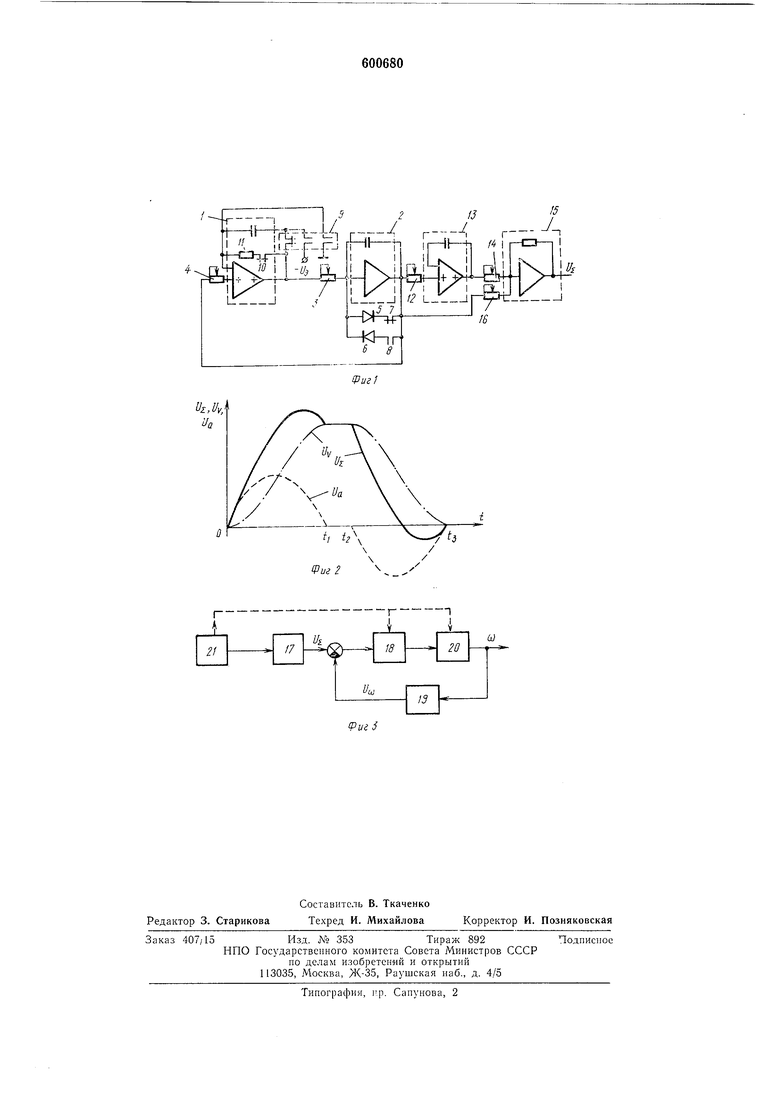
На фиг. 1 приведена иринциниальная схема задатчика управляющего напрял ения для электроприводов подъемно-транснортных механизмов; на фиг. 2 - временные диаграммы напрял еиий на отдельных элементах задатчика; на фиг. 3 - вариант структурной схемы системы электропривода лифта.
ИНтегрирующие (операционные) усилители 1, 2 соединены через регулируемые резисторы 3, 4 последовательно по замкнутой схеме. Усилитель 2 охвачен нелинейной обратной связью, образуемой параллельными цепями, включающими в себя диоды 5, 6 и ключи 7, 8.
Полярность диодов 5, 6 иротивоположна. Через контакты ключа 9 к интегрирующему усилителю 1 подключен источник эталоиного напрял ения UQ, обеспечивающий задание начальных условий. Ключ 10 шунтирует через резистор 11 усилитель 1. Выход иитегрирующего усилителя 2 через регулируемый резистор 12 соединен со входом интегрирующего усилителя 13. В свою очередь, выход усилителя 13 через регулируемый резистор 14 соединен со входом суммирующего (оиерационного) усилителя 15. Сюда подсоединен через регулируемый резистор 16 выход интегрирующего усилителя 2 и, кроме того, мол-сет быть включен сигнал обратной связи но скорости на выходе электропривода.
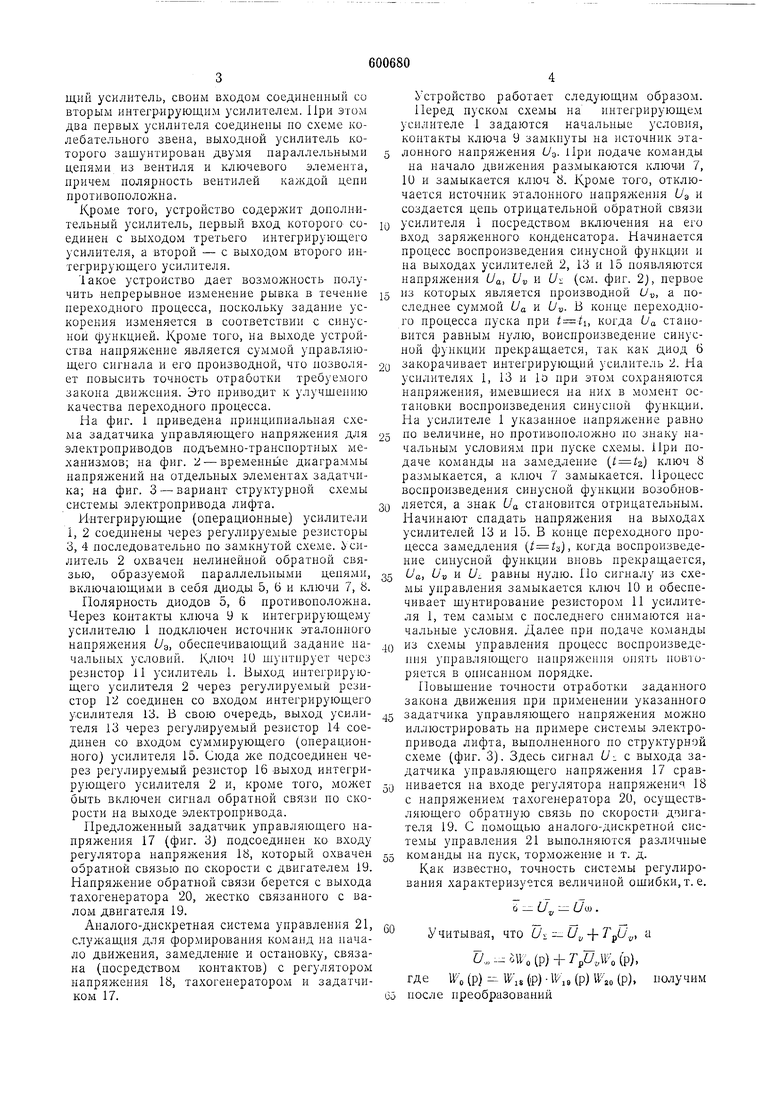
Предлолсеиный задатчик управляющего напряжения 17 (фиг. 3J подсоединен ко входу регулятора напрял ения 18, который охвачен обратной связью по скорости с двигателем 19. Паирял ение обратной связи берется с выхода тахогенератора 20, л естко связанного с валом двигателя 19.
Аналого-дискретная система управления 21, для формирования команд на начало движения, замедление и остановку, связана (посредством контактов) с регулятором напряжения 18, тахогенератором и задатчиком 17.
Устройство работает следующим образом.
Перед пуском схемы на интегрирующем
усилителе 1 задаются начальные условия,
контакты ключа 9 замкнуты на источник эталонного напряжения U. При подаче команды на начало движения раЗлМыкаются ключи 7, 10 и замыкается ключ 8. Кроме того, отключается источник эталонного нанрялсения U и создается цепь отрицательной обратной связи
усилителя 1 посредством включения на его вход заряженного конденсатора. Начинается процесс воспроизведения синусной функции и на выходах усилителей 2, 13 и 15 появляются напрял :ения Ua, iJv и U- (см. фиг. 2), первое
из которых является производной U-u, а последнее суммой Ua и Uv в конце переходного процесса пуска при i /i, когда Ua стаповится равным нулю, воиспроизведение синусной функции прекращается, так как диод 6
закорачивает интегрирующий усилитель 2. На усилителях 1, 13 и 1й при этом сохраняются наирял ения, имевшиеся на них в момент остановки воснроизведения синусной функции. На усилителе 1 указанное напрял еиие равно
по величине, но противоиолол но по знаку начальным условиям при пуске схемы. При подаче команды на замедлепие () ключ 8 размыкается, а ключ 7 замыкается. Процесс воспроизведения синусной функции возобновляется, а знак Ua становится отрицательным. Начинают спадать напрялсения на выходах усилителей 13 и 15. В конце переходного процесса замедления (), когда воспроизведение сипусной функции вновь прекращается,
и а, UTI и и равны нулю. По сигналу из схемы унравления замыкается ключ 10 и обесиечивает шунтирование резистором 11 усилителя 1, тем самым с последнего снимаются начальные условия. Далее при иодаче команды
из схемы уиравления процесс воспроизведения управляющего папряжения опять иовторяется в оиисанном иорядке.
Повышение точности отработки заданного закона движения при применении указанного
задатчика управляющего напрял :ения можно иллюстрировать на иримере системы электропривода лифта, выполненного по структурной схеме (фиг. 3). Здесь сигнал U с выхода задатчика уиравляющего нанряжения 17 сравнивается на входе регулятора напрял енин 18 с напрялсением тахогенератора 20, осуществляющего обратную связь по скорости двигателя 19. С помощью аналого-дискретной системы управлепия 21 выполняются различные
команды на пуск, тормол ение и т. д.
Как известно, точность системы регулирования характеризуется величииой ошибки,т.е.
. Учитывая, что U Uj -{-Tj U.., а
(р)-ЬГДГо(р), где W, (р) -- W,, IIP) W,, (р) Wjo (р), получим после преобразований
8 f/,l-Vo(p)I:Il+ n(p). Отсюда следует, что в случае полной пивариантности, т. е. 6 0, должно выполняться
условие W(,(p) , т. е. объект при этом
р„ соответствует по свойствам интегрирующему
звену. Последнее имеет место в электроприводах с асинхронными короткозамкнутыми двигателями при питании их от регулятора напряжения.
В случае, если указанное условие не выполняется, т. е. передаточная функция объекта имеет более сложный вид, достигается частичная инвариантность. Однако и при этом точность регулирования, т. е. отработки заданного закона движения, повышается.
Применение предлагаемого задатчика управляющего напряжения для электроприводов подъемно-транспортных машин, помимо улучшения качества переходного процесса и повышения точности воспроизведения заданного закона движения, позволяет упростить систему электропривода и повысить надежность всего устройства.
Формула изобретения 1. Задатчик управляющего напряжения для электроприводов подъемно-транспортных механизмов, содержащир два последовательно включенных интегрирующих Зсилителя, о тл и ч а ю щ и и с я тем, что, с целью упрощения конструкции, повыщения точности отработки
требуемого закона движения и улучшения качества переходного процесса, в него введен дополнительный третий интегрирующий усилитель, своим входом соединенный со вторым интегрирующим усилителем, при этом два
первых усилителя соединены по схеме колебательного звена, выходной усилитель которого зашунтирован двумя параллельными цепями из вентиля и ключевого элемента, причем полярность вентиля каждой цепи противоположна.
2. Задатчик по п. 1, о т л и ч а ю щ и и с я тем, что он содержит пропорциональный усилитель, один из входов которого соединен с выходом третьего интегрирующего усилителя, а второй
вход - с выходом второго интегрирующего усилителя.
Источники информации, принятые во внимание ирн эксиертизе
1.Лебедев Е. Д. и др. Управление вентиль11Ь1ми электроприводами постоянного тока. М.,
«Энергня, 1970. с. 144.
2.Патент США XQ 3774729, кл. 187-29, 1973.
,рь4
$
/J
-.у
1I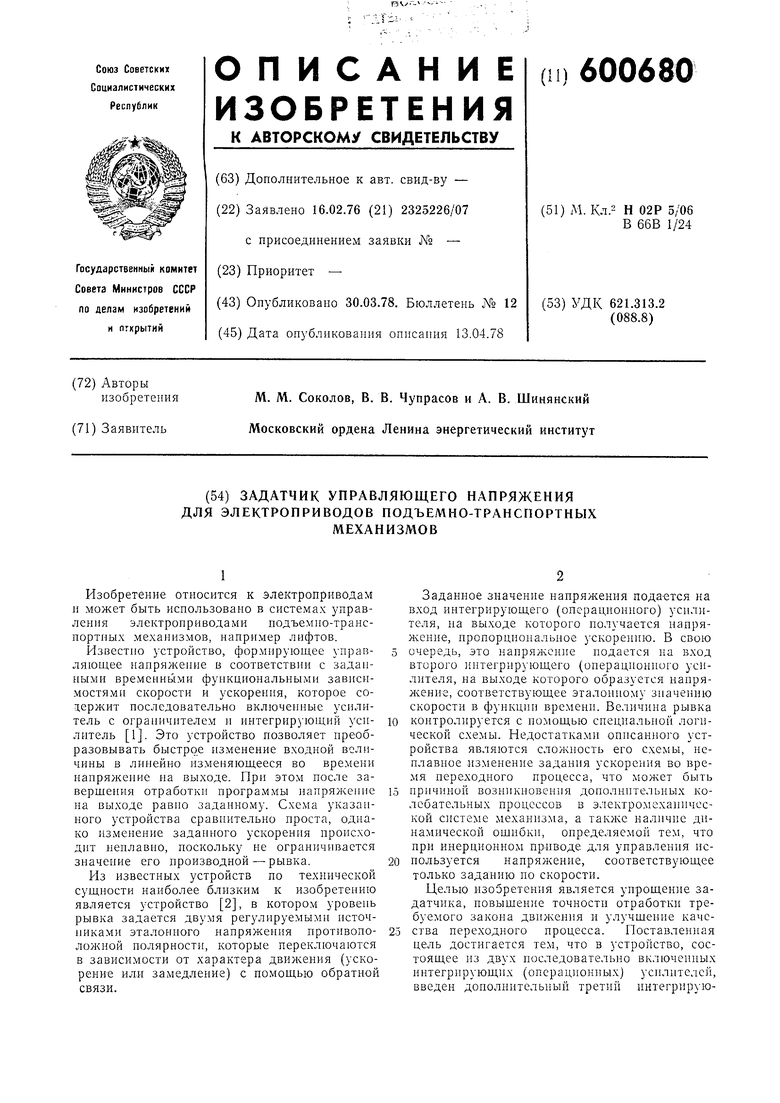
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU288339A1 |
| Устройство задания режима движения шахтной подъемной установки | 1986 |
|
SU1406110A1 |
| Бесконтактный регулируемый электропривод | 1986 |
|
SU1361697A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для управления непосредственным преобразователем частоты | 1971 |
|
SU576654A1 |
| Электропривод постоянного тока | 1976 |
|
SU661704A1 |