ного изменения напряжения на выходе интегрирующего ОУ 8. Это напряжение преобразуется элементом 12 вьщеления модуля в сигнал определенной полярности и подается через блок 13 гальванической разведки в качестве опорного на управляющий вход первого ограничителя 2. 2 ил.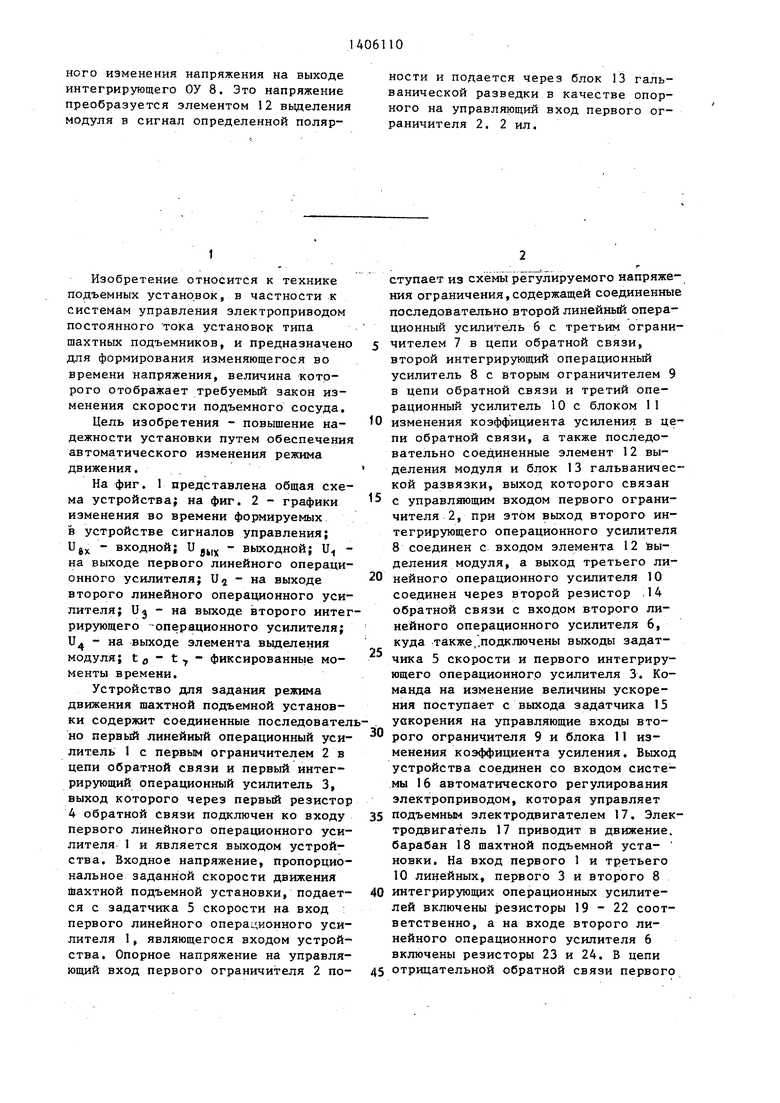



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |
| Устройство формирования программы работы электропривода шахтной подъемной установки | 1987 |
|
SU1578077A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
| Устройство для задания режима движения шахтной подъемной установки | 1984 |
|
SU1230956A1 |
| Устройство для управления подъемной машиной | 1985 |
|
SU1331784A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство управления наклонной шахтной подъемной установкой | 1980 |
|
SU891550A1 |
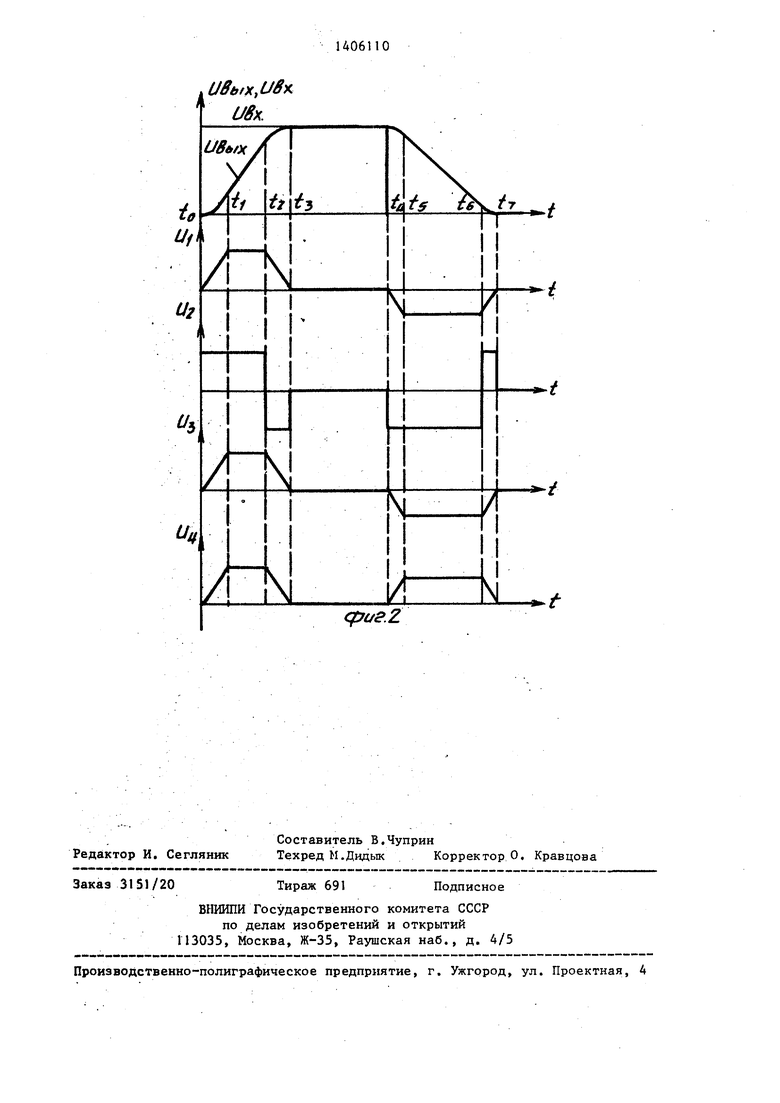
Изобретение относится к системам управления электроприводом постоянного тока шахтных подъемников. Цель изобретения - повышение надежно сти установки путем обеспечения автоматического изменения режима. Для этого устр-во снабжено блоком 13 гальванической разведки, третьим ограничителем 7, задатчиком 15 ускорения и блоком 11 изменения коэффициEt ента усиления. Ограничитель 7 вклю-м. чен в цепь обратной связи второго линейного операционного усилителя (ОУ) 6, выход которого подключен к входу второго интегрирующего ОУ 8. Вьгход ОУ 8 подключен к входу третьего линейного ОУ 10 и входу элемента. 12 выделения модуля. Выход линейного ОУ 10 через резистор 14 обратной связи соединен с входом второго линейного ОУ 6. С выхода задатчика 15 на управляющие входы второго ограничителя 9 и блока 11, включенного в цепь обратной связи третьего линейного ОУ Гб, поступает команда на изменение величины ускорения. Величина напряжения ограничения второго ограничителя 9 определяется допустимым ускорением привода при разгоне и выбирается по команде задатчика 15 ускорения в зависимости от реяотма движения. Ограничителем 7 ограничивается величина выходного напряжения ОУ 6, которая определяет темп линейс ® (Л с о с: (put. 1
1
Изобретение относится к технике подъемных установок, в частности к системам управления электроприводом постоянного тока установок типа шахтных подъемников, и предназначено для формирования изменяющегося во времени напряжения, величина которого отображает требуемый закон изменения скорости подъемного сосуда.
Цель изобретения - повышение надежности установки путем обеспечения автоматического изменения режима движения. .
На фиг. 1 представлена общая схема устройства; на фиг. 2 - графики изменения во времени формируемых 1в устройстве сигналов управления; Ug - входной; и j, - выходной; U - на выходе первого линейного операционного усилителя; Uj - на выходе второго линейного операционного усилителя; Uj - на выходе isToporo интегрирующего операционного усилителя; и - на выходе элемента вьзделения модуля; to - t7 - фиксированные моменты времени.
Устройство для задания режима движения шахтной подъемной установки содержит соединенные последовател но первый линейный операционный усилитель 1 с первым ограничителем 2 в цепи обратной связи и первый интегрирующий операционный усилитель 3, выход которого через первый резистор 4 обратной связи подключен ко входу первого линейного операционного усилителя- 1 и является выходом устройства. Входное напряжение, пропорциональное заданной скорости движения шахтной подъемной установки, подается с задатчика 5 скорости на вход : первого линейного операционного усилителя 1, являющегося входом устройства. Опорное напряжение на управляющий вход первого ограничителя 2 поступает из cxewii регулируемого напряжения ограничения,содержащей соединенные последовательно второй линейньй операционный усилитель 6 с третьим ограничителем 7 в цепи обратной связи, второй интегрирующий операционный усилитель 8 с вторым ограничителем 9 в цепи обратной связи и третий операционный усилитель 10 с блоком 11
0 изменения коэффициента усиления в цепи обратной связи, а также последовательно соединенные элемент 12 выделения модуля и блок 13 гальванической развязки, выход которого связан
5 с управляющим входом первого ограничителя 2, при этом вькод второго интегрирующего операционного усилителя 8 соединен с входом элемента 12 йы- деления модуля, а выход третьего ли0 нейного операционного усилителя 10 соединен через второй резистор 14 обратной связи с входом второго линейного операционного усилителя 6,
куда также .подключены выходы задатс
чика 5 скорости и первого интегрирующего операционного усилителя 3. Команда на изменение величины ускорения поступает с выхода задатчика 15 ускорения на управляющие входы вто0 рого ограничителя 9 и блока 11 изменения коэффициента усиления. Выход устройства соединен со входом системы 16 автоматического регулирования электроприводом, которая управляет
5 подъемным электродвигателем 17. Электродвигатель 17 приводит в движение, барабан 18 шахтной подъемной уста- новки. На вход первого 1 и третьего 10 линейных, первого 3 и второго 8
40 интегрирующих операционных усилителей включены резисторы 19-22 соответственно, а на входе второго линейного операционного усилителя 6 включены резисторы 23 и 24. В цепи
45 отрицательной обратной связи первого
3 и второго 8 интегрирующих операционных усилителей включены конденсаторы 25 и 26. В цепи отрицательной обратной связи третьего линейного операционного усилителя 10 включен резистор 27. Источники питания усилителей на схеме не показаны. Устройство задания может быть реализовано на элементах унифицированной блоч- ной системы регуляторов аналогового типа (УБСР). Операционные усилители и блок 13 гальванической развязки реализованы на усилителях постоянног тока (типа УПТ-3 и УПТ-4). Элемент 12 вьщеления модуля реализован на четырех диодах, включенньпс по мостовой схеме, первый ограничитель 2 реализован на четырех диодах, включенны по мостовой схеме и двух резисторах, для создания искусственной нулевой точки. Третий ограничитель 7 представляет собой, например, включенные встречно стабилитроны, а второй ограничитель 9 может быть реализован аналогично, но часть стабилитронов шунтируется, имеющимися в нем ключами по команде задатчика 15 ускорения Блок 11 изменения коэффициента усиления представляет собой, например, несколько последовательно соединен- ньк резисторов, которые шунтируются имеющимися в блоке ключами по команде задатчика 15 ускорения, который представляет собой, например, блок путевых датчиков, входящих в состав аппарата задания и контроля хода типа АЗК-1, вьщающих команды на изменение величины ускорения в процессе движения подъемного сосуда. Задатчик 5 скорости может быть реализован в виде соединенных последовательно сел синного командоаппарата и фазовьшря- мительного устройства. Источники питания - стандартные для питания уси- лителей типа УПТ-4, УПТ-3.
Устройство работает следующим образом.
В исходном состоянии, когда нет сигнала на выходе задатчика 5 скорое ти, равны нулю сигналы на входах и выходах всех операционных усилителей.
С подачей сигнала на вход устройства ( фиг. 2) с выхода задатчи- ка 5 скорости в момент времени t« на входе и вькоде второго линейного операционного усилителя 6 появляется напряжение, причем величина выходно
го (Uj, фиг. 2), ограничивается третьим ограничителем 7 и определяет темп линейного изменения напряжения на выходе второго интегрирующего операционного усилителя 8. Это линейно нарастающее напряжение (Uj, фиг. 2) преобразуется элементом 12 вьщеления модуля в сигнал определенной полярности и подается через блок 13 гальванической развязки в качестве опорного на управляющий вход первого ограничителя 2. При наличии линейно- нарастающего напряжения ограничения и/Сфиг. 2), напряжение на выходе первого линейного операционного усилителя I тоже нарастает:
и,
и,
и
1
to -i t t,
Т f Rll C2i4 ,
где Т - постоянная времени интегрирования второго 8 интегрирующего операционного усилителя; R; - оммическое сопротивление
резистора 22;
- емкость конденсатора 26. Величина постоянной времени Т, соответствует выбранному значению рывка в механизме.
При этом выходное напряжение устройства изменяется по закону
и,- --, t,t t,,
7
X
t тг У1
- коэффициент пропорциональности, определяющий рьшок в механизме;
Т а R 2i 25
- постоянная времени интегрирования первого 3 интегрирующего операционного усилителя ; - оммическое сопротивление
резистора 21;
- емкость конденсатора 25. образом, в течение времени t, выходное напряжение
5(фиг, 2) устройства изменяется по квадратичному закону. Сформированный jsaKOH изменения напряжения соответствует участку ограничения рывка в механизме.
, При tjjT t сигнал управления 1) становится постоянньм и равным напряжению ограничения вторрго ограничителя 9, величина которого определяется допустимым ускорением привода при разгоне и выбирается по команде задатчика 15 ускорения, в зависимости от режима движения. При постоянстве этого сигнала, сигнал управления и на выходе первого линейного операционного усилителя 1 тоже постоянный, поэтому выходное напряжение устройства (Uj,, фиг. 2) растет по линейному закону:
и
ВЫх
и,--, t,.
Таким образом, на участке t выходное напряжение устройства нарастает по линейному закону с ограничением ускорения, В момент t tj выходное напряжение второго линейного операционного усилителя 6 уменьшается до нуля за счет присутствия на его входе разности входного и выходного сигналов устройства, а также сигнала отрицательной обратной связи с выхода третьего линейного опера- циоиного усилителя 10. В этот момент времени алгебраическая сумма входных сигналов становится равной нулю
UBX- иы„х- Uj- К, О
(2),
где К - коэффициент усиления третье- го линейного операционного усилителя 10, который определяется отношением суммы сопротивлений резистора 27 и резисторов, содержащихся в блоке 11 изменения коэффициента усиления, к величине сопротивления резистора 20. В следующий момент времени алгебраическая сумма входных сигналов становится отрицательной
UBX- UH,X- .
Под действием суммарного сигнала напряжение на выходе второго линейного операционного усилителя 6 меняет знак (Кг, фиг. 2) и достигает макси- мума, задаваемого третьим ограничителем 7. Время описанного переключения очень мало и определяется большим собственным коэффициентом усиления
1106
второго линейного операционного усилителя 6. Для работы устройства необходимо выполнение условий
R
15
R И R
г-ь 24 м
5
0
5 О п
°
5
где 4 «5
Rj и - оммические сопротивления резисторов 19,4,23,24,14 соответственно .
Изменение знака напряжения U- приводит к разряду конденсатора 26 по линейному закону (U, фиг. 2), что вызывает уменьшение по этому же закону управляющего сигнала U (Фиг. 2) а, следовательно, уменьшение по линейному закону напряжения и. (фиг. 2) на вьпсоде первого линейного операционного усилителя 1. Поэтому выходное напряжение (U , фиг. 2) устройства
МХ
изменяется по квадратичному закону, |аналогично изменению напряжения на участке to t 4 t .
Сформированный закон изменения выходного напряжения соответствует участку ограничения рывка в механизме.
При t tj вькодное напряжение устройства становится равным входному напряжению и поэтому на входе и выходе первого линейного операционного усилителя 1 напряжение равно нулю (за счет действия отрицательной обратной связи через резистор 4), поэ- тому на выходе устройства напряжение (и , фиг. 2) будет постоянным до момента начала замедления шахтной подьеМной установки (t t). При t t, алгебраическая сумма сигналов на входе второго линейного операционного усилителя 6 становится, равной нулю
U6X- Ubb.x- из- Кг О, так как и и Uj 0.
Следовательно, равно нулю напряжение на выходах второго 6 линейного и второго 8 интегрирующего операционных усилителей, поэтому равно нулю напряжение на управляющем входе первого ограничителя 2.
Замедление начинается в момент исчезновения сигнала на выходе задатчика 5 скорости. Процесс замедления протекает аналогично описанному процессу пуска, т.е. работа устройства на участках tg; tj- t j- t-j аналогична работе на участках t ,t;i-tj соответственно, при этом обеспечивается ограничение рьшка в механизме в интервалах времени t - ty замедление с постоянным ускорением в интервале времени tj - t (фиг. 2).
Замедление происходит с меньшим, чем при разгоне ускорением, позто- му для согласованной работы задающего устройства необходимо изменить коэффициент усиления К третьего линейного операционного усилителя 10, пропорционально изменению напряжения ограничения второго интегрирующего операционного усилителя 8.
Значение коэффициента усиления К определяется следующим образом. Приращения выходного напряжения устройства Uptix на интервалах времени t J и tj одинаковы и определяются вьфажением (1);
.U«.ja...,..|..k. (3). TI
где t, -y-f- - ;
и J р - максимальное напряжение второго интегрирующего операционного усилителя 8, задаваемое вторым ограничителем 9. - Из уравнения (2) следует, что в момент t tj
Отсюда
dUen,- K Uscrp
TI изог
т;
Изменение К осуществляется по команде задатчика 15 ускорения шунтированием части резисторов, входящих в состав блока 1I изменения коэффициента усиления.
Формула, изобрете ни я
Устройство задания режима движения шахтной подъемной установки, содержащее соединенные последовательно первый линейный операционньй усилитель с первым ограничителем в цепи обратной связи и,первый инте-грирую- щий операционный усилитель, выход которого через первый резистор обратной связи соединен с входом первого линейного операционного усилителя,
10 соединенного также с выходом задатчика скорости и входом второго линейного операционного усилителя, а выход первого интегрирующего операционного усилителя соединен с входом второго
15 линейного операционного усилителя, второй интегрирующий операционный усилитель с вторым ограничителем в цепи обратной связи, третий линейный операционный усилитель и элемент вы20 деления модуля.отличающееся тем, что, с целью повышения надежности установки путем обеспечения автоматического изменения режима движения, оно снабжено блоком галь25 ванической развязки, третьим ограничителем, задатчиком ускорения и бло- . ком изменения коэффициента усиления, при этом третий ограничитель включен в цепь обратной связи второго линей30 ного операционного усилителя, выход которого подключен к входу второго интегрирующего операционного усилителя, выход которого подключен к входу третьего линейного операционного уси 35 лителя- и входу элемента выделения модуля, выход которого через блок гальванической развязки соединен ,с управляющим входом первого ограничи- (А) теля, а выход третьего линейного опе40 рационного усилителя через второй резистор обратной связи соединен с входом второго-линейного операционного усилителя, при этом выход задатчика ускорения соединен с управляю45 Щим входом второго ограничителя и управляющим входом блока изменения коэффициента усиления, BKjpo4eHHoro в цепь обратной связи третьего линейного операционного усилителя.
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1974 |
|
SU541255A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1984 |
|
SU1230956A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
