Изобретение относится к электротехнике, в частности к электроприводу с плавным регулированием частоты вращения, и может найти применение в следящих системах с вентильными электродвигателями .
Целью изобретения является улучшение динамических характеристик путем повышения быстродействия.
На фиг.1 представлена функциональная блок-схема бесконтактного регулируемого электропривода; на фиг.2 - графики сигналов..
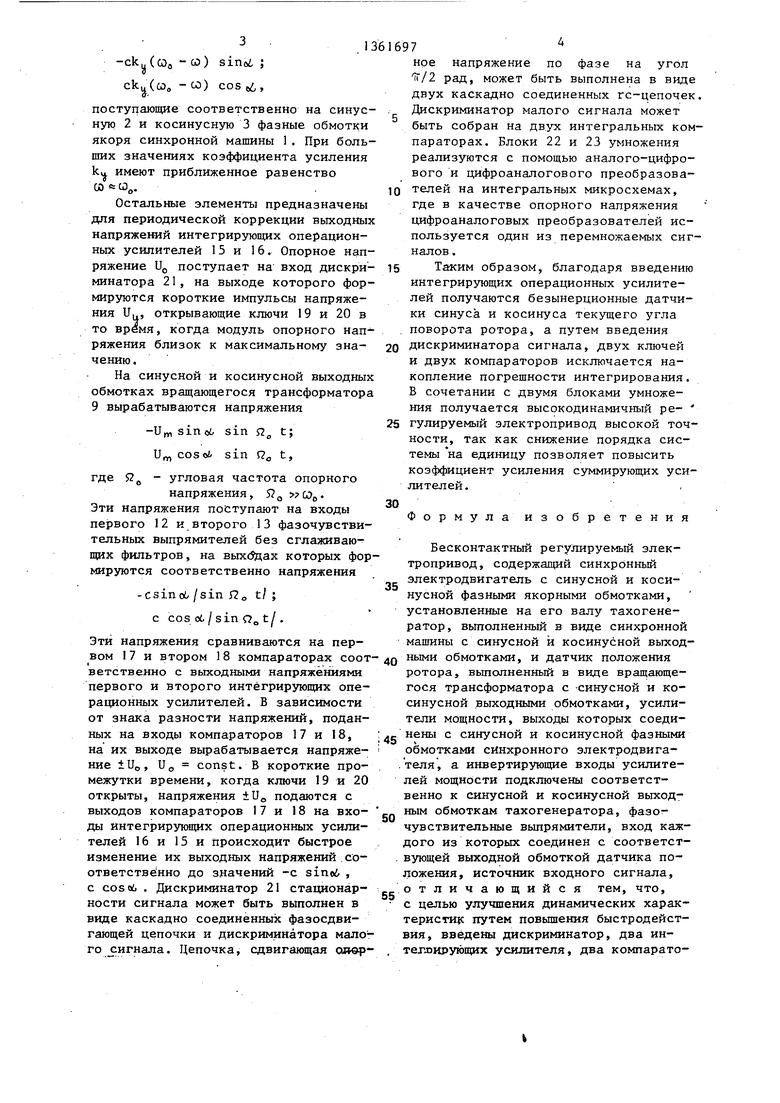
Бесконтактный регулируемый электропривод содержит двухфазную синхронную машину 1 с синусной 2 и коси нусной 3 фазными обмотками и ротором- индуктором 4, на валу синхронной машины 1 установлены тахогенератор 5, выполненный в виде синхронной машины с синусной 6 и косинусной 7 выходными обмотками и ротором-индуктором.8,
20 ряжения а на выходе фазочувстви- тельного выпр ямителя, напряжения U,p на выходе фильтра низкой частоты в известном электроприводе, напряжения и,, на выходе фазосдвигающей цепочки
ряжения -с sin ос и напряжения U на выходе первого интегрирующего операционного усилителя. Пороговое напря35
и датчик 9 положения в виде вращающегося трансформатора с синусной и ко- 25 и напряжения Un на выходе дискримина- синусной выходными обмотками. Синус- тора малого сигнала, идеального нап ная обмотка 2 синхронной машины 1 подключена к выходу усилителя 10 мощности, а-ее косинусная обмотка 3 - к выходу усилителя 11 мощности. Инвер- зо жение дискриминатора Малого сигнала, тирующие входы усилителей 10 и i 3 образующего вместе ,с фазосдвигающей мощности соединены с синусной 6 и ко- - цепочкой дискриминатор 21 стационар- синусной 7 выходными обмотками тахо- ности сигнала, обозначено через U. генератора 5. Выходные обмотки датчи- Бесконтактный регулируемый элек- ка 9 положения связаны с входами фа- зочувствительных выпрямителей 12 и 13. Электропривод содержит источник 14 входного сигнала.
В бесконтактный регулируемый электропривод введены два интегрирующих усилителя 15 и 16, два компаратора 17 и 18, два управляемых Ключа I9 и 20, дискриминатор 21 и два блока 22 и 23 умножения. Выход блока 22 умножения соединён с неинвертирующим вхо- g дом усилителя 11 мощности, а выход блока 23 умножения - с неинвертирующим входом усилителя 10 мощности.
тропривод работает следующим образом.
, С косинусной 7 и синусной 6 выходных обмоток тахогенератора 5 на входы соответственно первого 15 и вто- 40 рого 16 интегрирующих операционных усилителей поступают сигналы
. .oDcosoij -(osinoi,,
где oi - угол поворота ротора, эл. рад; со - частйта вращения. На выходах усилителей 15 и 16 вырабатываются напряжения
-с sinot
с cosoi
Одни входы блоков умножения подключены к выходу источника 14 входного сигнала, другой вход блока 22 умножения - к выходу интегрирующего усилителя 16 и одному входу компаратора
17,а второй вход блока 23 умножения - к выходу интегрирующего усилителя I5 и первому входу компаратора
18.Вторые входы компараторов,. 17 и 18 соединены с выходами фазочувстви- телыых выпрямителей 12 и 13. Выход
компаратора 17 через второй управляемый ключ 19 связан с одним неинвертирующим входом интегрирующего усиххи- теля 16, второй неинвертирующий вход которого подключен к синусной обмотке 6 тахогенератора. Выход компаратора 18 через первый управляемый ключ 20 связан с неинвертирующим входом
интегрирующего усилителя 15, инвертирующий вход которого соединен с косинусной обмоткой 7 .тахогенератора 5. Управляющие входы ключей 19 и 20 подключены к выходу дискриминатора 21,
вход которого соединен с входом датчика 9 положения. На вход датчика 9 положения по ступает переменный опорный сигнал.
На фиг.2 представлены графики напряжения а на выходе фазочувстви- тельного выпр ямителя, напряжения U,p на выходе фильтра низкой частоты в известном электроприводе, напряжения и,, на выходе фазосдвигающей цепочки
и напряжения Un на выходе дискримина- тора малого сигнала, идеального нап жение дискриминатора Малого сигнала, образующего вместе ,с фазосдвигающей цепочкой дискриминатор 21 стационар- ности сигнала, обозначено через U. Бесконтактный регулируемый элек-
ряжения -с sin ос и напряжения U на выходе первого интегрирующего операционного усилителя. Пороговое напряи напряжения Un на выходе дискримина- тора малого сигнала, идеального нап жение дискриминатора Малого сигнала, образующего вместе ,с фазосдвигающей цепочкой дискриминатор 21 стационар- ности сигнала, обозначено через U. Бесконтактный регулируемый элек-
и напряжения Un на выходе дискримин тора малого сигнала, идеального нап жение дискриминатора Малого сигнала образующего вместе ,с фазосдвигающей цепочкой дискриминатор 21 стационар ности сигнала, обозначено через U. Бесконтактный регулируемый элек-
тропривод работает следующим образом.
и напряжения Un на выходе дискримина- тора малого сигнала, идеального нап жение дискриминатора Малого сигнала, образующего вместе ,с фазосдвигающей цепочкой дискриминатор 21 стационар- ности сигнала, обозначено через U. Бесконтактный регулируемый элек-
, С косинусной 7 и синусной 6 выходных обмоток тахогенератора 5 на входы соответственно первого 15 и вто- рого 16 интегрирующих операционных усилителей поступают сигналы
. .oDcosoij -(osinoi,,
где oi - угол поворота ротора, эл. рад; со - частйта вращения. На выходах усилителей 15 и 16 вырабатываются напряжения
-с sinot
с cosoi
они поступают на входы блоков 22 и 23 умножения, на вторые входы которых поступает от источника 14 аналоговый сигнал, пропорциональный требуемой частоте вращения На выходах блоков умножения формируются сигналы -с сЭо , которые сравниваются на входах усилителей 10 и П мощности. На выходах усилителей 10 и 11 получаются напряжения
-cky(сОд - со) sinoi j
ckuXco,, - CO) cos , ffпоступающие соответственно на синусную 2 и косинусную 3 фазные обмотки якоря синхронной машины 1. При больших значениях коэффициента усиления ku имеют приближенное равенство СО «: со„.
Остальные элементы предназначены для периодической коррекции выходных напряжений интегрирующих операционных усилителей 15 и 16, Опорное напряжение UQ поступает на вход дискриминатора 21, на выходе которого формируются короткие импульсы напряжения и, открывающие ключи 19 и 20 в то время, когда модуль опорного напряжения близок к максимальному значению.
На синусной и косинусной выходных обмотках вращающегося трансформатора 9 вырабатываются напряжения
-и sin об sin t;
и cosoi
sin t.
где Я - угловая частота опорного
напряжения, со
оЭти напряжения поступают на входы первого 12 и второго 13 фазочувстви- тельных выпрямителей без сглаживаю- щих фильтров, на BbDcdftax которых формируются соответственно напряжения
-csino6 /sin r2o t/ ;
с cos ot, / sin QO t/. Эти напряжения сравниваются на перном 17 и втором 18 компараторах соот-40 обмотками, и датчик положения
ветственно с выходными напряжениями первого и второго интегрирующих операционных усилителей. В зависимости от знака разности напряжений, поданных на входы компараторов 17 и 18, на их выходе вырабатывается напряжение ±Uo, UQ const. В короткие промежутки времени, когда ключи 19 и 20 открыты, напряжения ±Ue подаются с выходов компараторов 17 и 18 на входы интегрирующих операционных усилителей 16 и 15 и происходит быстрое изменение их выходных напряжений соответственно до значений -с sinoi , с cos of, . Дискриминатор 21 стационарности сигнала может быть выполнен в виде каскадно соединенных фазосдви- гающей цепочки и дискриминатора малого сигнала. Цепочка, сдвигающая слюр
61697
нре напряжение по фазе на угол ir/2 рад, может быть выполнена в виде двух каскадно соединенных гс-цепочек.
. Дискриминатор малого сигнала может быть собран на двух интегральных компараторах. Блоки 22 и 23 умножения реализуются с помощью аналого-цифрового и цифроаналогового преобразова10 телей на интегральных микросхемах, где в качестве опорного напряжения цифроаналоговых преобразователей используется один из перемножаемых сигналов .
15 Таким образом, благодаря введению интегрирующих операционных усилителей получаются безынерционные датчики синуса и косинуса текущего угла , поворота ротора, а путем введения
20 дискриминатора сигнала, двух ключей и двух компараторов исключается накопление погрешности интегрирования. В сочетании с двумя блоками умножения получается высокодинамичный ре-
25 гулируемый электропривод высокой точности, так как снижение порядка системы на единицу позволяет повысить коэффициент усиления суммирующих усилителей.
35
Формула изобретения
Бесконтактный регулируемый электропривод, содержалщй синхронный электродвигатель с синусной и косинусной фазными якорными обмотками, установленные на его валу тахогене- ратор, выполненный в виде синхронной машины с синусной k косинусной выход5
0
5
ротора, вьталненный в виде вращающегося трансформатора с -синусной и косинусной выходными обмотками, усилители мощности, выходы которых соединены с синусной и косинусной фазными обмотками синхронного электродвигателя, а инвертирующие входы усилителей мощности подключены соответственно к синусной и косинусной выходным обмоткам тахогенератора, фазо- чувствительные выпрямители, вход каждого из которых соединен с соответствующей выходной обмоткой датчика положения, источник входного сигнала, отличающийся тем, что, с целью улучшения динамических характеристик путем повьшения быстродействия, введены дискриминатор, два ин- терлзирующих усилителя, два компаратоpa, два управляемых ключа и два блока умножения, выход каждого из которых соединен с неинвертирующим входом соответствующего усилителя мощности, одни входы блоков умножения подключены к выходу источника входного сигнала, другой вход каждого блока умножения соединен с выходом одного из интегрирующих усилителей и одним входом соответствующего компаратора, вторые входы компараторов подключены к выходам фазочувствитель ных выпрямителей соответственно, выход одного компаратора через первый управляемый ключ связан с неинверти
рующим входом одного из интегрирующих усилителей, инвертирующий вход . которого соединен с косинусной выходной обмоткой тахогенератора, синусная обмотка которого подключена к неинвертирующему входу другого интегрирующего усилителя, вторым неинвертирующим входом связанного через второй управляемый ключ с выходом другого компаратора, управляющие входы упомянутых ключей .подключены к выходу дискриминатора, вход которого соединен с входом датчика положения, предназначенным для подачи переменного опорного сигнала.
9иг.2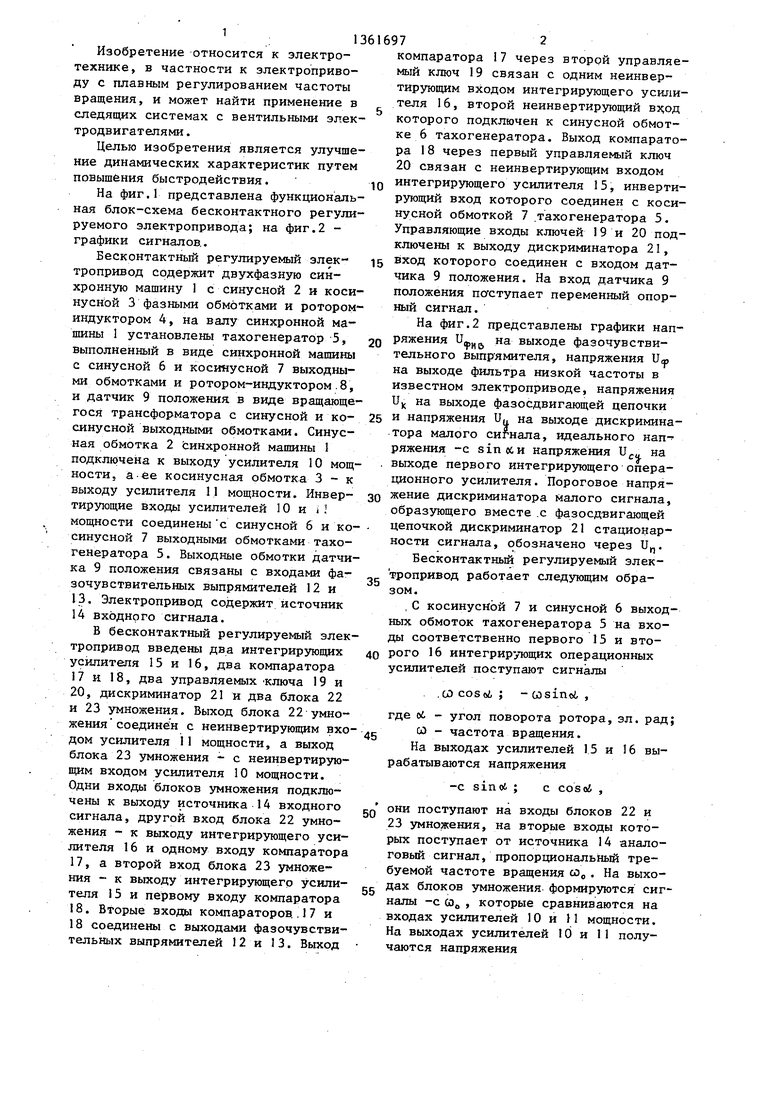
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Бесконтактный регулируемый электропривод | 1990 |
|
SU1830598A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Преобразователь угла поворота вала во временной интервал | 1977 |
|
SU655890A1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
Изобретение относится к злектро- технике и может быть использовано в следящих системах с вентильными злек- тродвигателями. Целью данного изобретения является улучшение динамических характеристик путем повышения быстродействия. Указанная цель достк- гается введением в бесконтактный регулируемый электропривод интегрир.ую- щих усилителей 15 и 16, компараторов 17 и 18, управляемых ключей 19 и 20, дискриминатора 21 и блсйсов умножения 22 и 23. В результате введения интегрирующих усилителей 15 и 16 образуется безынерционный датчик положения 9 ротора синхронной машины I. Дискриминатор 21, ключи 19 и 20 и компараторы 17 и 18 позволяют исключить накопление погрешности интегрирования. В v сочетании с блоками умножения 22 и , 23 введенные узлы обеспечивают высокую точность управления синхронной машиной 1, т.к. снижается порядок системы регулирования. 2 ил. I (Л
Редактор И.Николайчук
Составитель А.Головченко
Техред М.Ходанич Корректор И.Муска
Заказ 6301/55
Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 1Г3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Управляемый вентильный электродвигатель | 1980 |
|
SU920973A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
