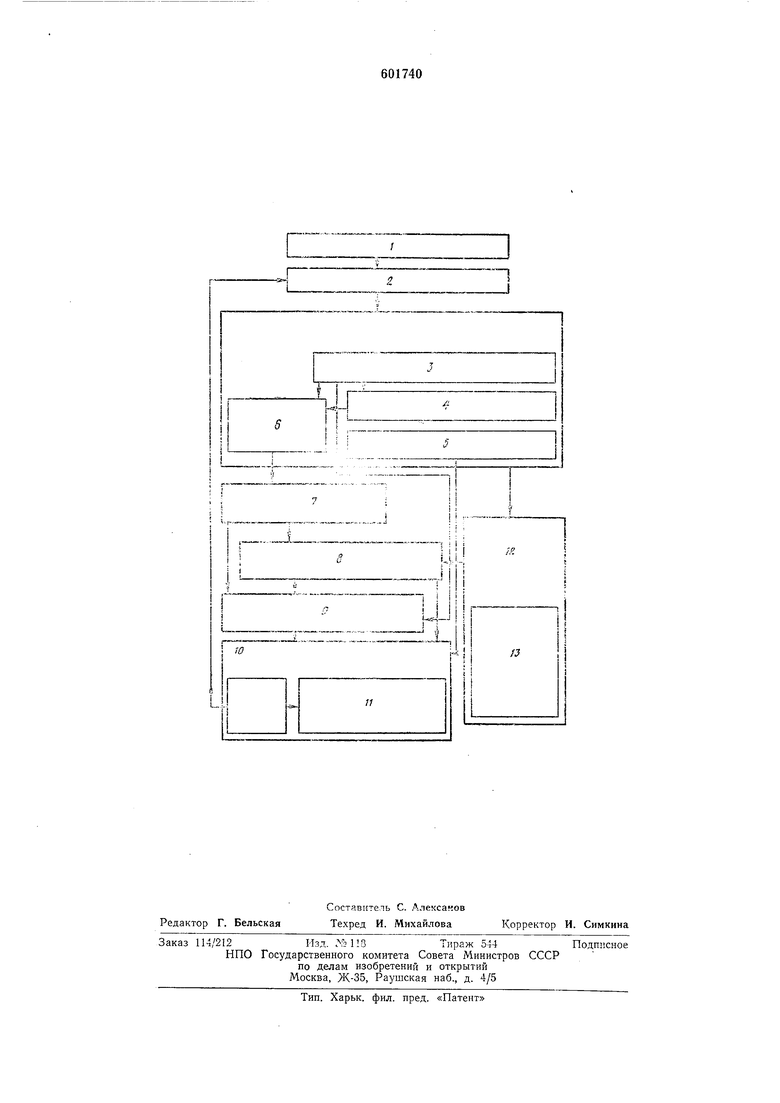
Вход блока 10 ото-бражения ннформации для обучаемого подключен к блоку 5 д:таамилш движения. Пульт 12 обучающего, содержащий блок 13 отображения каформации для обучающего, подключен к входу блока 8 зада1ния о:бстало1В.ки для о бз чаемого; .вход пульта 12 подключен к iMaTeMaTK4acKOMy ycTipoftству обработки .инфо,р мации.
Устройство работает следующиим образом.
При (Воздействии обучаемым на блок / органов управления механические перемещения органов измеряются блоками 2 датчиков сбора и нформадни и дравращаются в электрические силналы. Эти сигналы, отображающие положения «рычагов тормоза, газа, угла поворота руля, Сцапления и т. д., поступают в мате1матическое устройство обработки инфор-мациИ, в котором :мадели:руется динамика движения транспортного средства. Сюда же через блок 2 поступает информация с киноили 1магнитной ленты о дорожных условиях.
Математическое устройст1во обработки информации KipOMe модели:рован.ия динамики движения Т ранспортного средства также ОСущаствляет логический контроль изменений пара,метров движения (остановка двигателя, неао1блюдение дорожиых знаков, повыщение скорости, съезд с трассы и др.) посредством блока 3. Блок 3 логичеокого контроля в зависимости от важности и характера нарущеПИЙ выдает сигналы в блок 4 объективной оценки для накопления оценочной информации. Если происходит чрезвычайное происшествие, например «автоа-вария, то блок 3 логического контроля посылает сигналы в блок 9 синтеза обучающих и корректирующих команд для формирования сигналов визуализации чрезвычайных щрои.оществий в блок 10 отображения информации для обучаемого.
В случае нарущения или отклонения поведения обучае1мого от указанных пределов, В1след1ствие чего требуется повторение о бучения в тех же или измененных условиях, блок 3 логического контроля посылает сигналы в блок 6, который вырабатывает или выбирает программу адаптивного обучения.
В зависимости от выра:ботанных в блоке 3 логичеокого контроля сигналов блок 7 выбирает ,из своей памяти соответствующую программу, которая выра|батывает сигналы
управления блоком 8 задания обстановки для обучаемого.
Блок 8 задания обстановки для обучаемого синтезирует информацию, поступающую с блока 7 и с пульта обучающего 12 и вырабатывает программу визуальной обстановки, которую пе,редает в блок 10 ото,бражения информации для обучаемого, и сигналы программы дополнительной инструктивной иифорМапии, которые поступают в блок 9 синтеза обучающих и корректирующих команд. Блок 9 по этим сигналам вырабатывает программу управления блоком 11 отображения обучающих и корректирующих в блоке 10 отображения информации для обучаемого.
Форм у л а и 3 о б р е т е н и я
Устройство для обработки и отображения информащии тренажера водителя транспортного средства, содержащее блок органов управления, связанный с блоком датчиков сбора инфориМа|Ции, выход которого электричеоки соединен с блокО|М логичеокого контроля, блоком объективной оценки, блоком динамики движения, связанным с блоком отображения информации для обучаемого и блоком отображения обучающих и корректирующих команд, блок отображения информации для обучающего и пульт обучающего, который электрически соединен с блоком задапия обстановки для обучаемого, отличающееся тем, что, с целью повыщения эффективности обучения, оно имеет блок адаптивного обучения, блох изменения програ,ммы обучения, блок синтеза обучающих и корректирующих команд, при этом блок изменения црограМмы обучения через блок адаптивного 0|бзЧбния электрически соединен iC блоком объективной оценки и блоком логического контроля, а блок задания обстановки для обучаемого через блок синтеза обучающих и корректирующих команд электричеоки соединен с блоком отображения информа.цни для обучаемого.
Источ ник информации, п.ринятый во внимание лри экспертизе:
1. Авторское свидетельство СССР Яо 439842, кл. G 09 В 9/00, 1975 г.
z:
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| Тренажер транспортных средств | 1981 |
|
SU1008765A1 |
| МОРСКОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ТРЕНАЖЕР | 2003 |
|
RU2251157C2 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
| МОРСКОЙ ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ, ТРЕНИРОВКИ И ПОВЫШЕНИЯ КВАЛИФИКАЦИИ ОПЕРАТОРОВ И СПЕЦИАЛИСТОВ ПО ПРИМЕНЕНИЮ ГИДРОФИЗИЧЕСКИХ КОМПЛЕКСОВ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ АНОМАЛИЙ ВОДНОЙ СРЕДЫ | 2010 |
|
RU2445710C2 |
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
| Устройство для группового обучения водителей транспортных средств | 1983 |
|
SU1170487A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| КОМПЬЮТЕРНЫЙ ТРЕНАЖЕР НАЧАЛЬНОЙ ПОДГОТОВКИ МЕХАНИКА-ВОДИТЕЛЯ | 2001 |
|
RU2190256C1 |