ны управления содержит идентичные каналы, каждьй из которых состоит из последовательно соединенных первого и второго операционных усилителей, в цепях обратных связей которых включены соответственно резисторы и встречно-параллельно включен;ные ограничительные диоды;; последовательно с которыми включены источники опорного напряжения и масштабные резисторы, при этом входы первых операционных усилителей являются входами блока смены приоритета, выходами которого являются входы вторых операционных усилителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обучения водителей наземных транспортных средств | 1983 |
|
SU1170485A1 |
| Устройство для управления автотранспортным предприятием | 1983 |
|
SU1173420A2 |
| Устройство для решения оптимизационных задач режимов хранения сельскохозяйственной продукции | 1984 |
|
SU1292013A1 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU1029144A2 |
| Тренажер транспортного средства | 1985 |
|
SU1444863A1 |
| Тренажер транспортного средства | 1985 |
|
SU1361605A1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2285958C1 |
| Тренажер оператора транспортных средств | 1984 |
|
SU1265830A1 |
| Тренажер водителя транспортного средства | 1980 |
|
SU934530A1 |
| Тренажер для обучения водителя автомобиля служебному торможению | 1990 |
|
SU1790000A1 |
Г. УСТРОЙСТВО ДЛЯ ГРУППОВОГО ОВУЧЕНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ, содержащее блоки моделирования динамики движения транспортных средств, подключенные входами к датчикам положения органов управления транспортным средством на рабочих местах, снабженных индикаторами и исполнительными элементами воздействия на обучаемого, имитатор дорожной обстановки с управляемым теневым визуализатором и экраном, блок смены программ, связанньй с блоком эталонных сигналов,, выходы которого и выходы блоков моделирования динамики движения транспортного средства подключены к соответствующим входам вычислительного блока, включающего в себя блок логического контроля и блок сХ рмирования управляющих, воздействий, выходы которого являются выходами вычислительного блока и соединены с исполнительными механизмами воздействия на обучаемого, и блок оценки действий обучаемых с блоком ранжирования, отличающееся тем, что, с целью повьшгения эффективности обучения за счет введения соревновательного фактора, вычислительный блок снабже1г подключенным информационными входами к блоку логического контроля блоком определения приоритета, подключенным к его выходам блоком смены упр-авления, а блок оценки действий обучаемых снабжен на входе блоком учета приоритетов, подключенным к одному из его выходов блоком определения времени успешных управлений и подключенным к выходу блока о ранжирования блоком формирования S сигналов индикации ранга обучаемого (Л выходы которого являются выходами с блока оценки и соединены с индикаторами на рабочих местах обучаемых. 2.Устройство по п.1, о т л и ч ающееся тем, что блок определения приоритета содержит идентичные каналы, каждый из которых состоит из операционных усилителей и управляющего реле, через замыкающие 4i контакты которого вход одного из усиСХ) лителей подключен к генератору напч ряжения, а к выходу упомянутого усилителя подключены через развязывающие резисторы второй и третий операционные усилители с множительными .элементами в цепи обратной связи, при этом входами блока определения приоритета являются управляющие входы множительных элементов и управляющего реле, а выходами - выходы вторых и третьих операционных усилителей . 3.Устройство по п. 1, о т л ичающееся тем, что блок рме
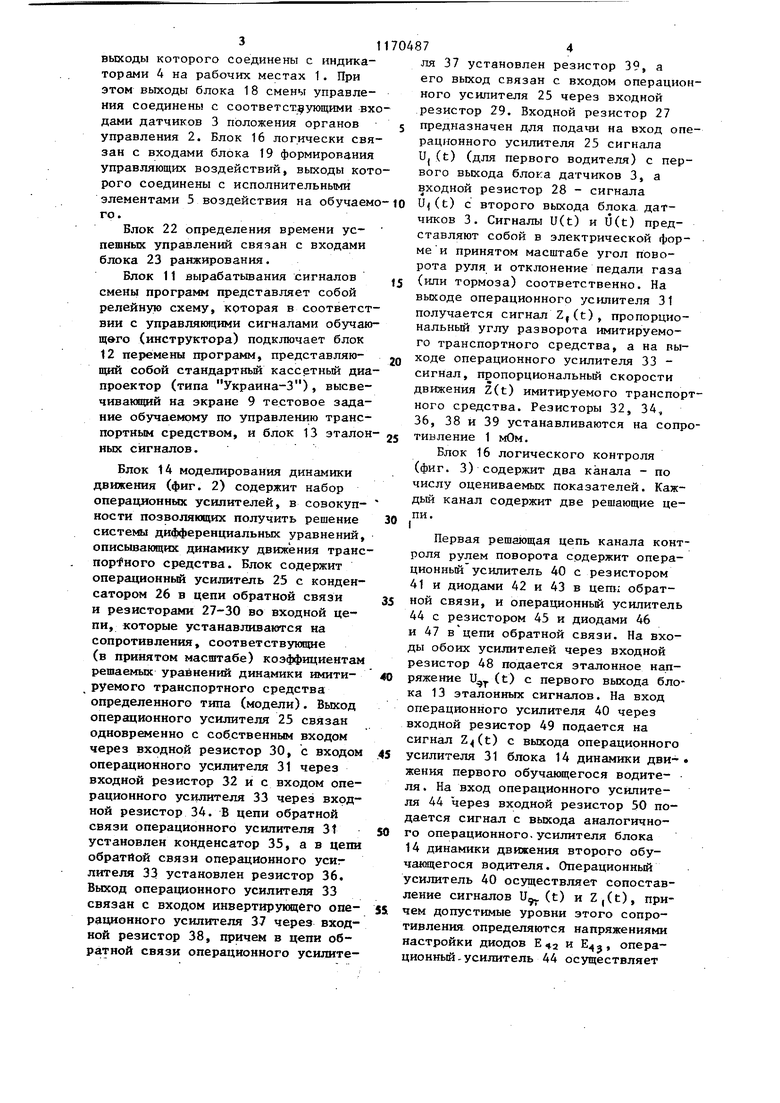
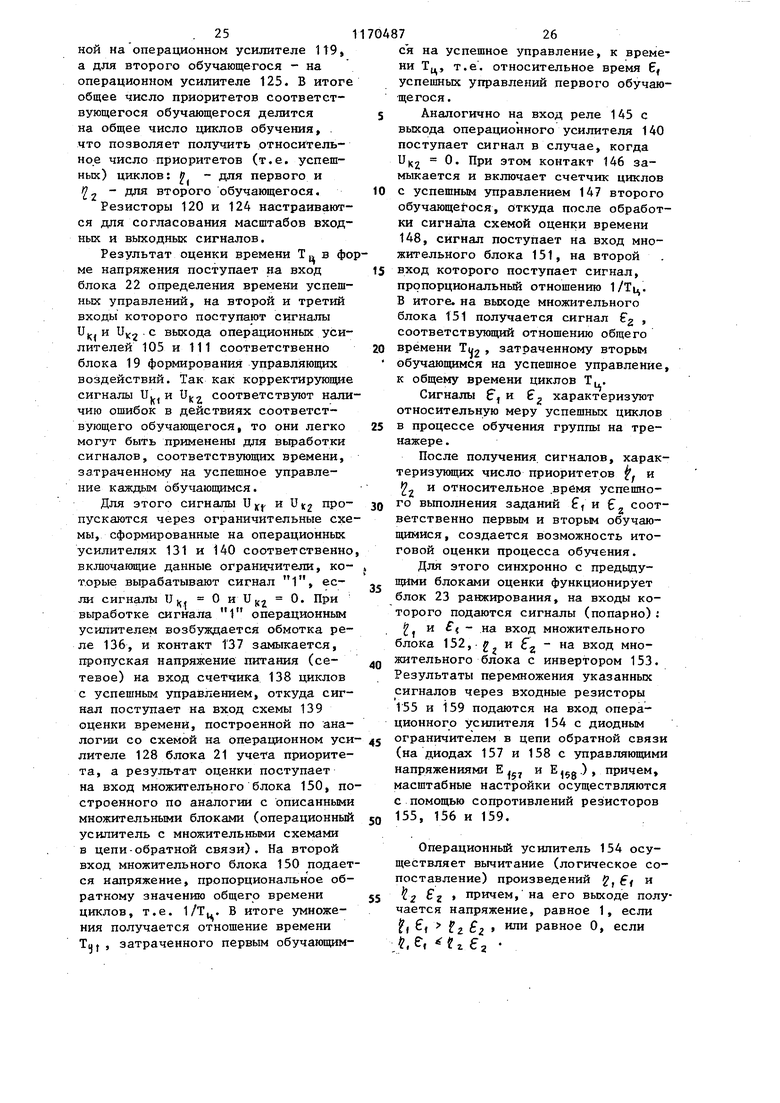
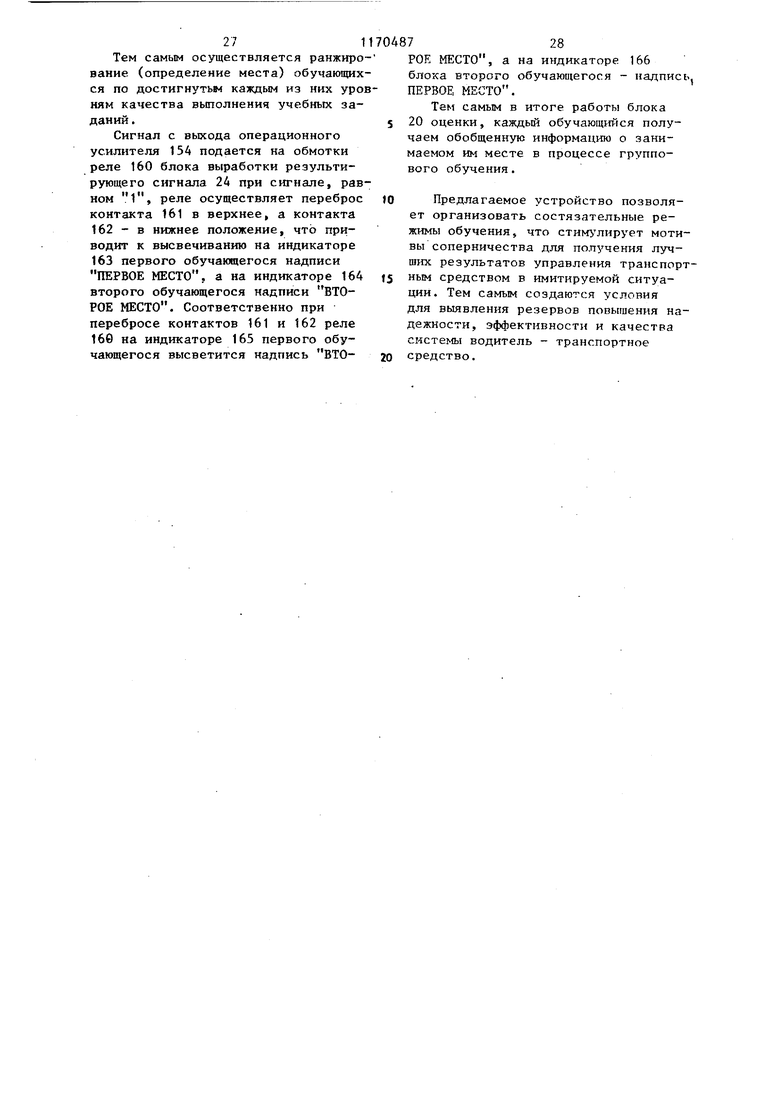
Изобретение относится к техническйм средствам обучения и может быть использовано для профессиональ ной подготовки операторов системы человек - машина, в частности водителей наземных транспортных -средств в автошколах и учебных комбинатах. Цель изобретения - повышение эффективности обучения за счет введения соревновательного фактора. На фиг. 1 изображена блок-схема устройства для группового обучения водителей транспортных средств (на примере двух обучаемых)-, на фиг. 2 схема блока моделирования динамики движения; на фиг. 3 - схема блока логического контроля, на фиг. 4 схема блока определения приоритета; на фиг. 5 - схема блока смены управ ления; на фиг. 6 - схема блока формироваиия управляющих.воздействий, на фиг. 7 - схема блока приоритета; на фиг. 8 - схема блока определения времени успешных управлений, на фиг. 9 - схема блоков ранжирования и формирования сигналов индикации ранга обучаемых. Устройство для группового обучения водителей транспортных средств содержит рабочие места 1 (представляющие собой аналоги-рабочих мест водителей грузового автомобиля), об рудованные стандартными органами управления 2, с датчиками 3 положения, индикаторами 4 и исполнитель ными элементами 5 воздействия на об чаемого (в виде микровибраторов, укрепляемых на конечностях обучаемых) . Перед рабочими местами 1 установлен имитатор 6 дорожной обстановки (типа имитатора автотренажера АТ-75) содержащий теневой визуализатор 7, блок 8 управления и экран 9, на который проектируется дорожная обстановка в соответствии с манипуляциями обучаемого органами управления 2 и текстовой информацией, вырабатываемой блоком 10 смены программ, включающим блок 11 сигналов смены программ и блок 12 переключения программ и связанным с блоком 13 эталонных сигналов. Выходы датчиков 3 положения подключены к входам блоков 14 моделирования динамики движения транспортных средств (выполненными в виде набора операционных усилителей, решающих дифференциальные уравнения динамики движения соответствующего транспортного средства). Выходы блока 13 эталонных сигналов и блока 14 моделирования динамики движения транспортньк средств подключены к соответствующтлм входам вычислительного блока 15, включающего в себя блок 16 логического контроля , подключенный к нему информационными входами блок 17 определения приоритета, связанньй выходами с блоком 18 смены управления, блок 19 формирования управляющих воздействий и блок 20 оценки действий обучаемого, снабженный на входе блоком 21учета приоритета, первым входом соединенным с блоком 11 выработки сигналов смены программ, другими входами - с блоком определения приоритета, первым выходом - с блоком 22определения времени успешных управлений, а другими выходами - с входами блока 23 ранжирования, к которому подключен блок 24 формирования сигналов индикации ранга обучаемого.
выходы которого соединены с индикаторами 4 на рабочих местах 1. При этом выходы блока 18 смены управления соединены с соответствующими вхдами датчиков 3 положения органов управления 2. Блок 16 логически связан с входами блока 19 формирования управляющих воздействий, выходы котрого соединены с исполнительными элементами 5 воздействия на обучаем го.
Блок 22 определения времени успешмых управлений связан с входами блока 23 ранжирования.
Блок 11 вырабатьтания сигналов смены программ представляет собой релейную схему, которая в соответствии с управлякицими сигналами обучающего (инструктора) подключает блок 12 перемены программ, представляюгций собой стандартньй кассетный диапроектор (типа Украина-3), высвечивающий на экране 9 тестовое задание обучаемому по управлению транспортным средством, и блок 13 эталон ных сигналов.
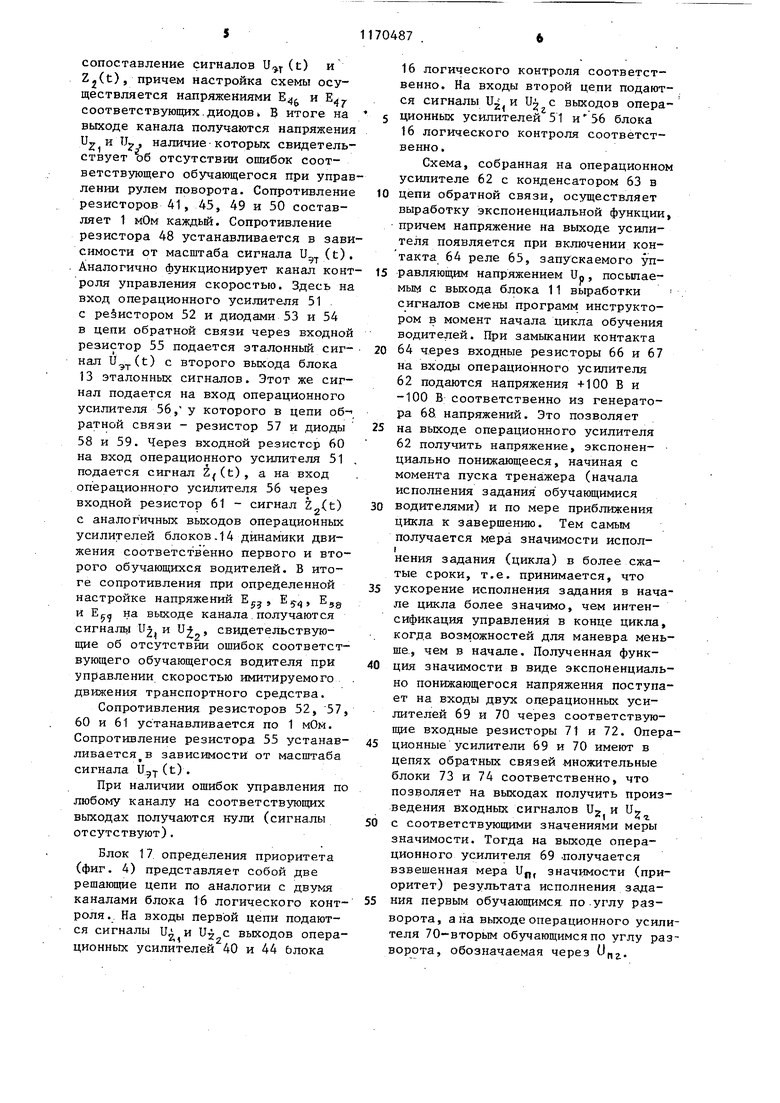
Блок 14 моделирования динамики движения (фиг. 2) содержит набор операционных усилителей, в совокупности позволяющих получить решение системы дифференциальных уравнений, описьшающих динамику движения трансnopfHoro средства. Блок содержит операционный усилитель 25 с конденсатором 26 в цепи обратной связи и резисторами 27-30 во входной цепи, которые устанавливаются на сопротивления, соответствунише (в принятом масштабе) коэффициентам решаемых уравнений динамики имитируемого транспортного средства определенного типа (модели). Выход операционного усилителя 25 связан одновременно с собственным входом через входной резистор 30, с входом операционного усилителя 31 через входной резистор 32 к с входом операционного усилителя 33 через входной резистор 34. В цепи обратной связи операционного усилителя 31 установлен конденсатор 35, а в цепи обратйой связи операционного усиг лителя 33 установлен резистор 36. Выход операционного усилителя 33 связан с входом инвертирующего oneрационного усилителя 37 через входной резистор 38, причем в цепи обратной связи операционного усилителя 37 установлен резистор 39, а его выход связан с входом операционого усилителя 25 через входной резистор 29. Входной резистор 27 предназначен для подачи на вход опрационного усилителя 25 сигнала Uj (t) (для первого водителя) с первого выхода блока датчиков 3, а входной резистор 28 - сигнала U(t) с второго выхода блока, датчиков 3. Сигналы U(t) и U(t) представляют собой в электрической форме и принятом масштабе угол поворота руля и отклонение педали газа (или тормоза) соответственно. На выходе операционного усилителя 31 получается сигнал Z,(t), пропорциональный углу разворота имитируемого транспортного средства, а на выходе операционного усилителя 33 сигнал, пропорциональный скорости движения Z(t) имитируемого транспорного средства. Резисторы 32, 34, 36, 38 и 39 устанавливаются на сопртивление 1 мОм.
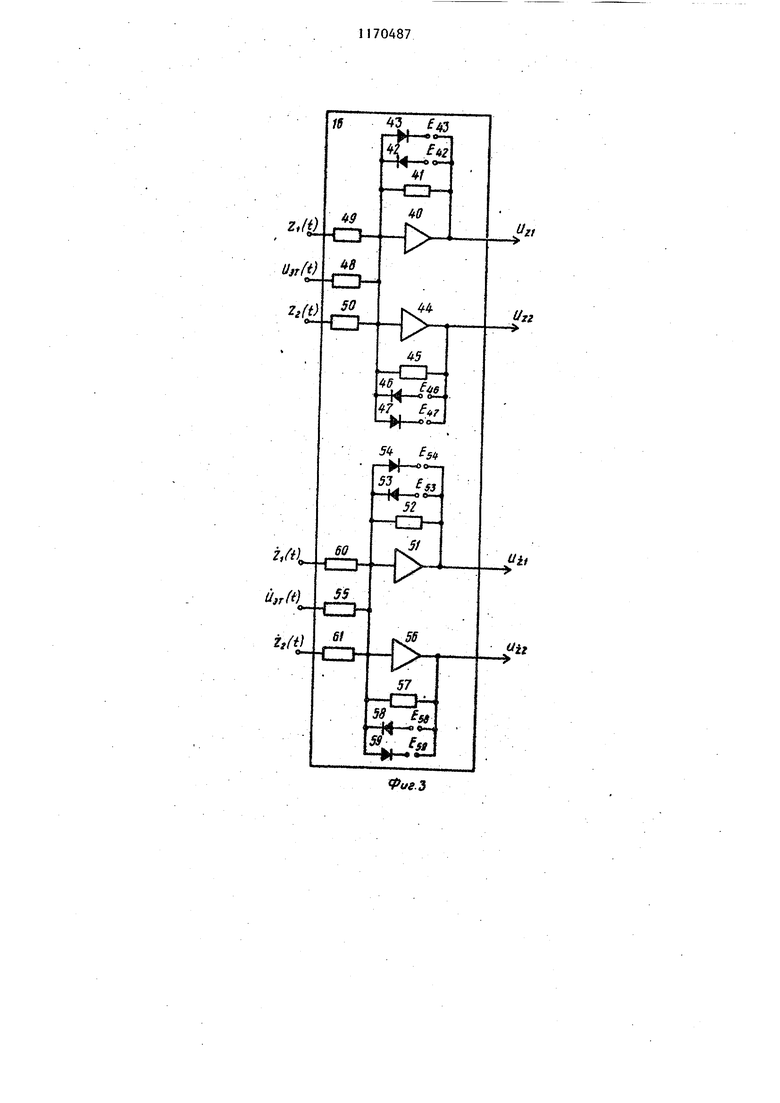
Блок 16 логического контроля (фиг. 3) содержит два канала - по числу оцениваемых показателей. Каждый канал содержит две решающие цепи. I
Первая решающая цепь канала контроля рулем поворота содержит операционный усилитель 40 с резистором 41 и диодами 42 и 43 в цепи обратной связи, и операционньй усилитель 44 с резистором 45 и диодами 46 и 47 вцепи обратной связи. На входы обоих усилителей через входной резистор 48 подается эталонное напряжение и(t) с первого выхода блока 13 эталонных сигналов. На вход операционного усилителя 40 через входной резистор 49 подается на сигнал Z(t) с выхода операционного усилителя 31 блока 14 динамики движения первого обучакмцегося водителя . На вход операционного усилителя 44 через входной резистор 50 подается сигнал с выхода аналогичного операционного, усилителя блока 14 динамики движения второго обучающегося водителя. Операционный усилитель 40 осзпцествляет сопоставление сигналов и (t) и Z,(t), причем допустимые уровни этого сопротивления определяются напряжениями настройки диодов Е42 и Е, операционный усилитель 44 осуществляет
сопоставление сигналов U(t) и Z.(t), причем настройка схемы осуществляется напряжениями Е и Е,. соответствующих.диодовk В итоге на выходе канала получаются напряжения и и U.J, наличие которых свидетельствует об отсутствии ошибок соответствующего обучающегося при управлении рулем поворота. Сопротивление резисторов 41, 45, 49 и 50 составляет 1 мОм каждьй. Сопротивление резистора 48 устанавливается в зависимости от масштаба сигнала U (t). Аналогично функционирует канал конт роля управления скоростью. Здесь на вход операционного усилителя 51 с резистором 52 и диодами 53 и 54 в цепи обратной связи через входной резистор 55 подается эталонный сигнал U(t) с второго выхода блока 13 эталонных сигналов. Этот же сигнал подается на вход операционного усилителя 56, у которого в цепи обратной связи - резистор 57 и диоды 58 и 59. Через входной резистор 60 на вход операционного усилителя 51 подается сигнал Z(t), а на вход операционного усилителя 56 через входной резистор 61 - сигнал Z,(t) с аналогичных выходов операционных усилителей блоков. 14 динамики движения соответственно первого и второго обучающихся водителей. В итоге сопротивления при определенной настройке напряжений Е , Е, Egg и ЕК на выходе канала получаются сигналь 112. и и , свидетельствуюш;ие об отсутствии ошибок соответствующего обучающегося водителя при управлении скоростью имитируемого движения транспортного средства.
Сопротивления резисторов 52, 57, 60 и 61 устанавливается по 1 мОм. Сопротивление резистора 55 устанавливается в зависимости от масштаба сигнала (t).
При наличии ошибок управления по любому каналу на соответствующих выходах получаются нули (сигналы отсутствуют).
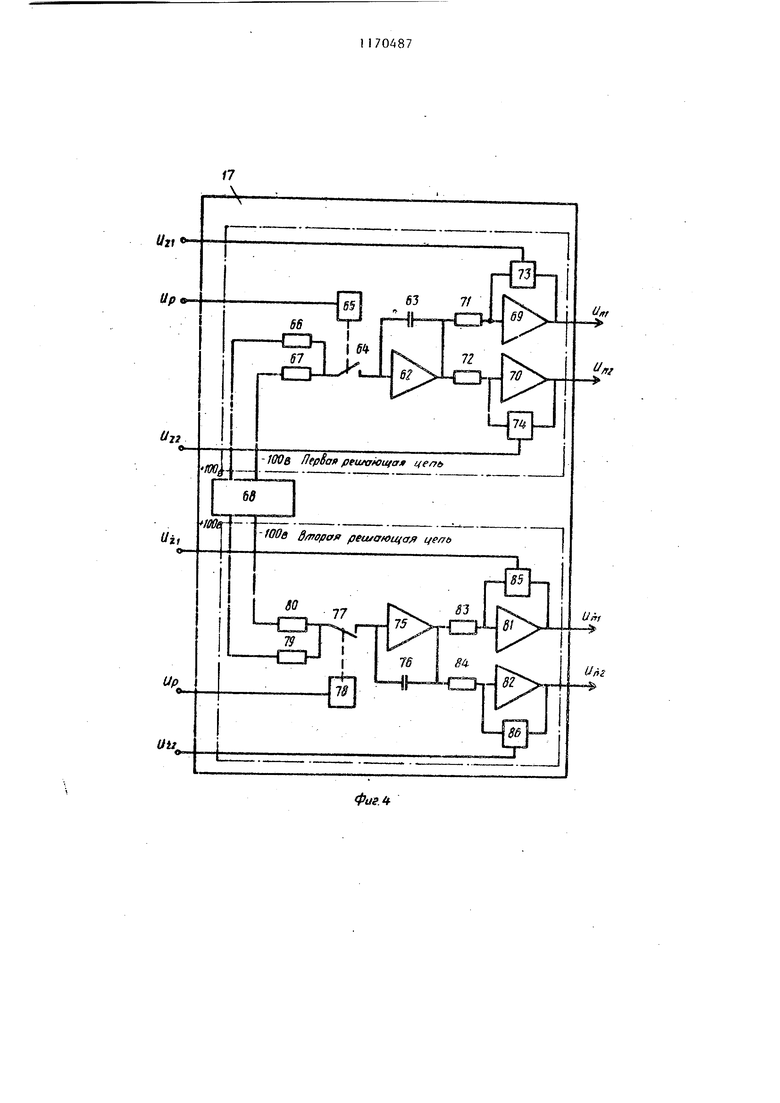
Блок 17 определения приоритета (фиг. 4) представляет собой две решающие цепи по аналогии с двумя каналами блока 16 логического контроля. На входы первой цепи подаются сигналы ил и и с выходов операционных усилителей 40 и 44 Ьлока
16 логического контроля соответственно. На входы второй цепи подаются сигналы и и и. с выходов операционных усилителей 51 и 56 блока 16 логического контроля соответственно .
Схема, собранная на операционном усилителе 62 с конденсатором 63 в цепи обратной связи, осуществляет выработку экспоненциальной функции, причем напряжение на выходе усилителя появляется при включении контакта 64 реле 65, запускаемого управляющим напряжением Up, посьтаемым с выхода блока 11 выработки сигналов смены программ инструктором в момент начала цикла обучения водителей. При замыкании контакта 64 ч.ерез входные резисторы 66 и 67 на входы операционного усипителя 62 подаются напряжения +100 Б и -100 В соответственно из генератора 68. напряжений. Это позволяет на выходе операционного усилителя 62 получить напряжение, экспоненциально понижающееся, начиная с момента пуска тренажера (начала исполнения задания обучающимися водителями) и по мере приближения цикла к завершению. Тем самым получается мера значимости исполнения задания (цикла) в более сжатые сроки, т.е. принимается, что ускорение исполнения задания в начале цикла более значимо, чем интенсификация управления в конце цикла, когда возможностей для маневра меньше, чем в начале. Полученная функция значимости в виде экспоненциально понижающегося напряжения поступает на входы двух операционных усилителей 69 и 70 через соответствующие входные резисторы 71 и 72. Оперционные усилители 69 и 70 имеют в цепях обратных связей .множительные блоки 73 и 74 соответственно, что позволяет на выходах получить произведения входных сигналов U н U с соответствующими значениями меры значимости. Тогда на выходе операционного усилителя 69 -получается взвешенная мера U, значимости (приоритет) результата исполнения задания первым обучающимся, по.углу разворота, а на выходе операционного усилтеля 70-вторым обучающимся по углу раворота, обозначаемая через nz
Аналогично строится и вторая решающая цепь, в которой содержится операционный усилитель 75 с конденсатором 76 в цепи обратной связи, на вход которого через контакт 77 реле 78 входные резисторы 79 и 80 подаются соответственно, стандартные напряжения -ьЮО В и -100 В с выходов генератора 68 напряжений. Реле 78 управляется напряжением Up, посылаемым с выхода блока 11 выработки сигналов смены программ инструктором в момент начала цикла обучения водителей, т.е. вторая решающая цепь запускается синхронно с первой решающей цепью. На выходе интегрирзтощего операционного усилителя 75, таким образом, получается экспоненциально взвешенная функция, понижаницаяся по мере приближения цикла к завершению. Эта функция в виде напряжения поступает на входы операционных усилителей 81 и 82 через соответствующие входные ре зисторы 83 и 84. В цепях обратной связи операционных усилителей 81 и 82 установлены стандартные множительные блоки 85 и 86 соответственно, на входы которых подаются напряжения, в принятом масштабе соответствующие сигналам U и U соответственно, что позволяет на выходах операционных усилителей 81 и 82 получить произведения сигналов U и и с соответствующими значениями мер значимости. Тогда на выходах указанных усилителей получаются взвешенные меры Uv и U,. значимости (приоритеты) выполнения задания по управлению скоростью транспортного средства соответственно первым и вторым обучакнцимися.
Сопротивления резисторов 66, 67, 71, 72, 79, 80, 83 и 84 устанавливаются на значения, позволяющие-согласовать масштабы всех входных и выходных сигналов (по правилам установки сопротивлений резисторов в аналоговых решающих цепях).
Множительные устройства являются стандартными блоками аналоговых вычислительных машин и применяются . в зависимости от структур соответствукицей злектронной схемы.
Генератор 68 напряжений, включенньй в блок 17 приоритета, является стандартным преобразователем напряжения питания, широко применяемьм
в аналоговых вычислительных машинах (АВМ). Наиболее удобно в предлагаемом устройстве применение генератора, основанного на стандартных цепях АВМ типа МН-18. На базе стандартных множительных блоков МН-18 строятся и множительные блоки вида 73 и 74 в блоке 17 приоритета. С помощыо блока 17 определения
0 приоритета сигнал, соответствующий факту исполнения обучающимся задания на тренажере, взвешивается с учетом совершенных- обучающимся ошибок в управлении как по каналу
5 поворота, так и по каналу скорости (ускорения или торможения). Тот из обучающихся, который выполнит задание первьм, получает более высокий уровень приоритета.
0
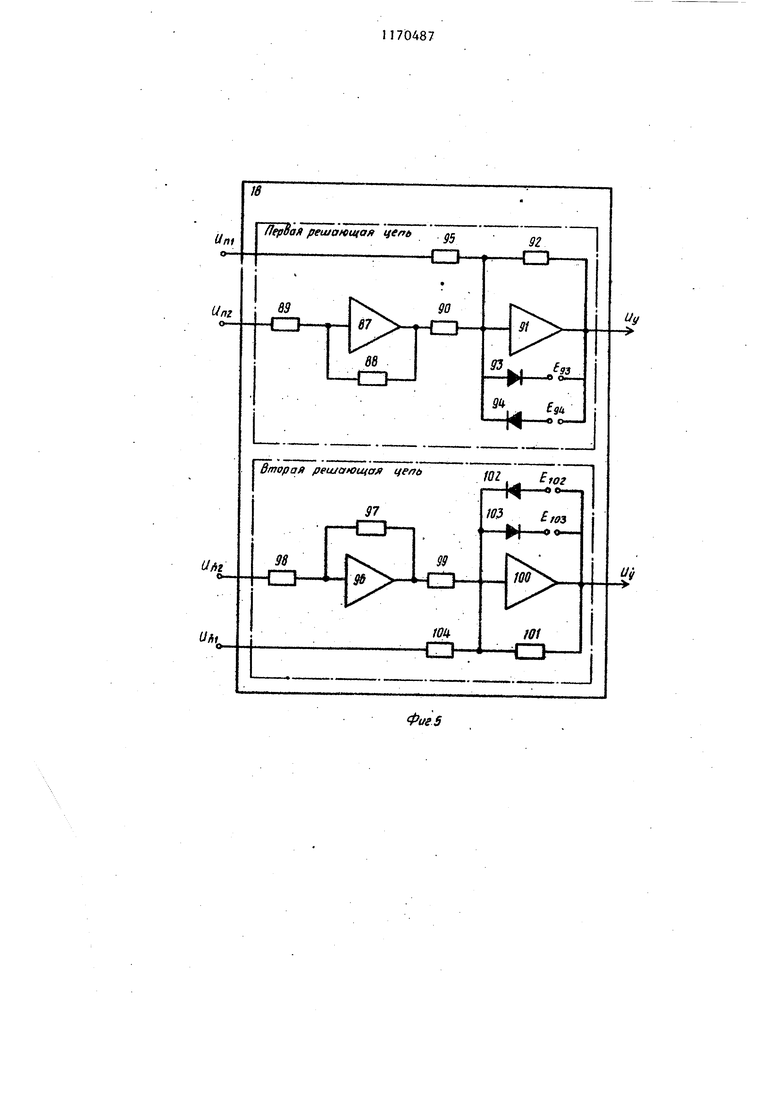
Блок 18 смены управления (фиг. 5) содержит две решающие цепи соответственно для сопоставления приоритетов по каналу управления поворотом и каналу управления ско5ростью. Первая решающая цепь содержит инвертирующий операционный усилитель 87, в цепи обратной связи которого установлен резистор 88, а через входной резистор 89 кото0рого подается сигнал с выхода операционного усилителя 70 блока 17 приоритета. Выход операционного усилителя 87 через резистор 90 связан с входом операционного усилителя
5 91, в цепи обратной связи которого , установлены резистор 92 и диодные ограничители 93 и 94, управляемые напряжениями Е и Е., а на вход которого через резистор 95 подается сигнал выхода операционного усилителя 69 блока 17 приоритета. В результате ограничительная логическая схема на операционном усилителе 91 осуществляет выработ-.
5 ку сигнала U как результата сопос- « тавления приоритетов. Напряжения ЕЬ, и ЕС позволяют настроить схему на выработку сигнала U 1, означающего предпочтение приоритета
0 первого обучающегося перед приоритетом второго обучающегося. Этот сигнал подается на вход блока управления теневым визуализатором 7, и переключение на новую ситуацию (новое задание) осуществляется только
от блока датчиков 3 первого обучающегося водителя. Тем самым водитель, приобретающий больший приоритет за
91
лучшее исполнение задаьия, приобретает возможность управлять усложнением ситуации при дальнейшей имитации езды. Сигнал Uu О на выходе операционного усилителя 91 означает что аналогичные возможности приобретает второй обучающийся водитель. Это касается управления по каналу разворота имитируемого транспортного средства. Переключение управления ситуацией по каналу управления скоростью осуществляется с помощью выработки сигналов Uu 1 или Uu второй решающей цепью блока 18 смены управления.
Вторая решающая цепь содержит инвертирующий операционный усилитель 96 с резистором 97 в цепи обратной связи, на вход которого через входной резистор 98 подается сигнал с выхода операционного усилителя 82 блока 17 приоритета. Сигнал с выхода операционного усилителя 96 через входной резистор 99 подается на вход операционного усилителя 100 с резистором 101 и диодами 102 и 103 в цепи обратной связи. На вход операционного усилителя 100 через входной резистор 104 подается сигнал и с выхода операционного усилителя 81 блока17 приоритета. Диодные ограничители настраиваются напряжениями Е и Е,о соответственно. На выходе второй решающей цепи получается сигнал Uy, принимающий значения О или 1 в зависимости от п-ого, теряет или приобретает приоритет второй обучающийся водитель.
Сопротивления резисторов 89, 90, 92, 95, 98, 99, 101 и 104 устанавливаются таким образом, чтобы согласовать масштабы входных и выходны сигналов.
Выходные сигналы Uy и U,J подаются на входы блоков датчиков 3 рабочих мест 1 обучающихся, где они при условии равенства 1 через стандартные реле подключаются к управлению с пульта данного обучающегося блока 8 управления теневым визуализатором 7. В этот момент для второго обучающегося соответствующие сигналы с выхода блока 18 смены управления равны О, .и на его рабочем месте датчики 3 положения отключаются от блока 8 управления. В таком случае только первьй обу0487 - 10
чающийся в виде поощрения за свои успехи получает возможность задавать новые дорожные ситуации при имитации езды на групповом тренажере. При получении приоритета вторым обучающимся картина управления ситуацией по данному каналу изменится.
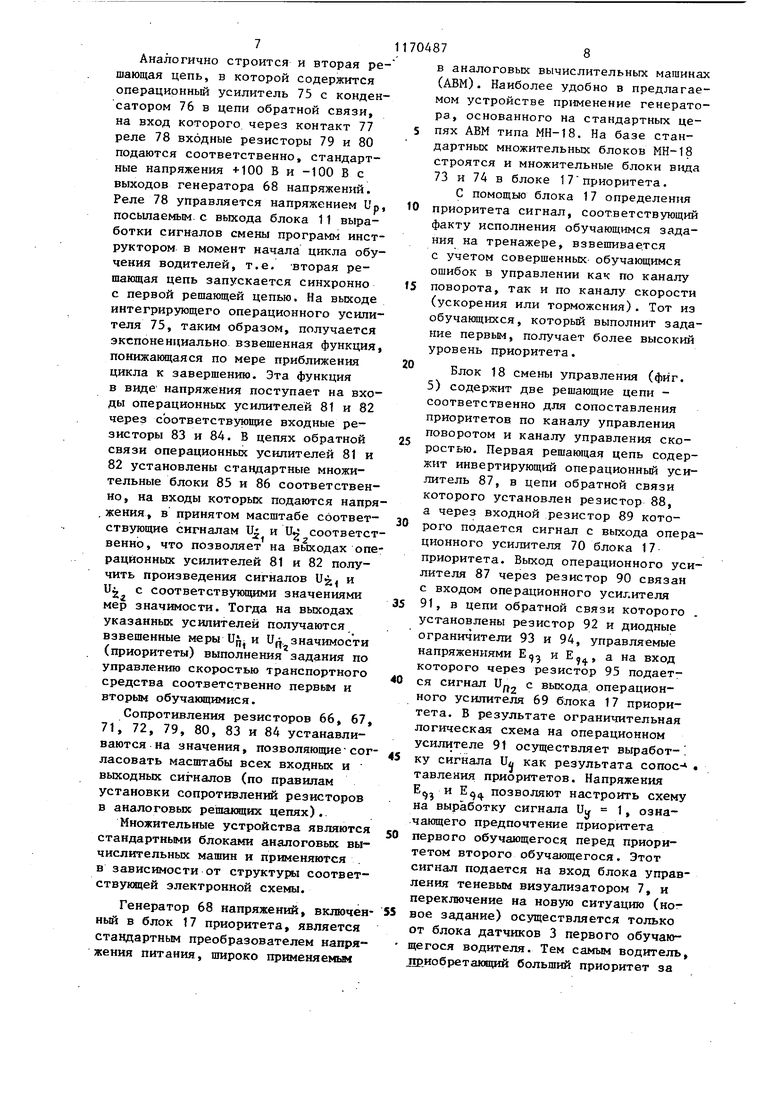
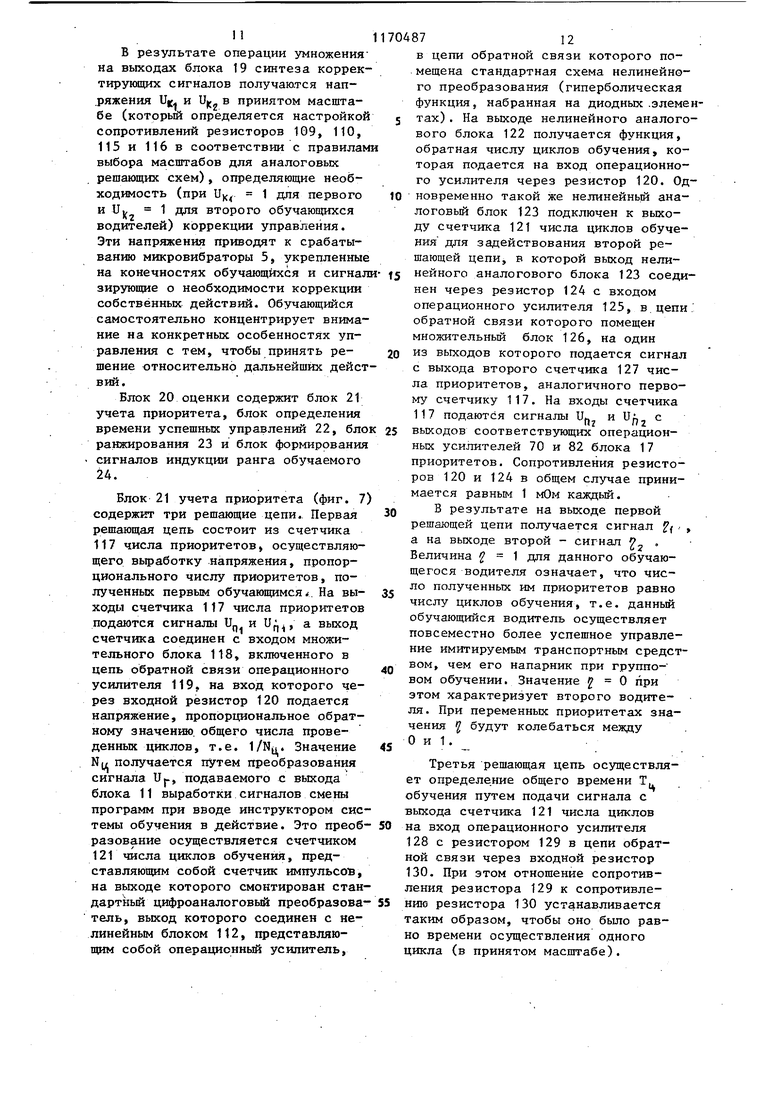
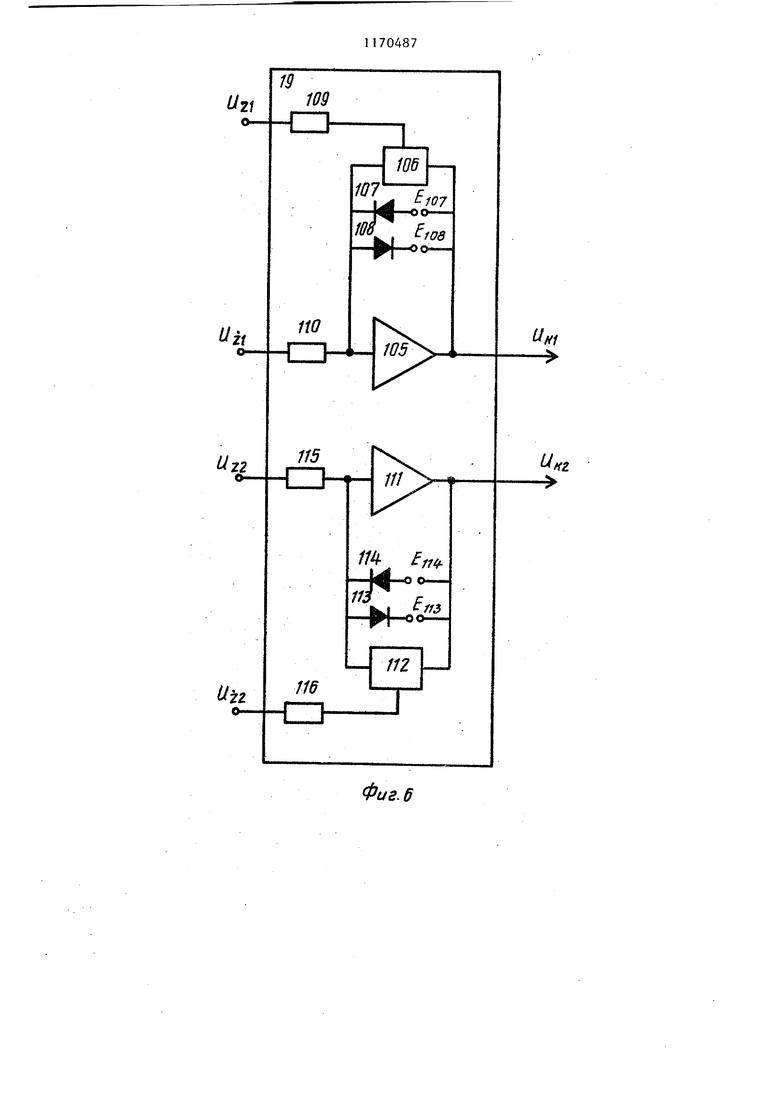
Блок 19 формирования управляющих
10 воздействий (фиг. 6), на выходы которого.поступают сигналы с выходов блока 16 логического контроля, вырабатывает сигнал об ошибке соответствующего обучающегося. Если
15 поступают все сигналы для данного обучающегося, то это означает, что управление осуществляется им успешно и при этом никакой коррекции управления не требуется. Если же
20 блок 16 логического контроля вырабатьшает сигнал О, то блок 19 синтеза корректирующих сигналов вырабатывает для соответствующего обучающегося сигнал о необходимости
25 коррекции управления.
Блок 19 фиксирования управляющих воздействий содержит две решающие цепи идентичной структуры. Первая решающая цепь содержит операцион-,
30 ный усилитель 105, в цепи обратной связи которого имеются множительный блок 106 и диодные ограничители 107 и 108, настраиваемые .управляющими напряжениями Е и Е ,Qg соответственно. Через входной резистор 109 на вход операционного усилителя 105 подается сигнал U с выхода операционного усилителя 40 блока 16 логического контроля, а через входной резистор 110 - сигнал и 2 с выхода операционного усилителя 51 блока 16 логического контроля . Перемножение этих сигналов позволяет получить на выходе решаю5 щей цепи либо О, либо Ч (первое - если на входах хотя бы один сигнал равен О, второе - если оба сигнала равны 1). Аналогично вторая решающая цепь содержит операционный усилитель 111, в цепи обратной связи которого содержатся множительньй блок 112 и диоды 113 и 114, срабатьшание которых определяется настройкой напряжений
5 и E,j соответственно. Через входной резистор 115 подается сигнал а через резистор 116 - сигнал
,
в результате операции умножения на выходах блока 19 синтеза корректирующих сигналов получаются напряжения U|f, и Uj5 в принятом масштабе (которьй определяется настройкой сопротивлений резисторов 109, 110, 115 и 116 в соответствии с правилам выбора масштабов для аналоговых решающих схем), определяющие необходимость (при U), 1 для первого к Vy, 1 для второго обучающихся водителей) коррекции управления. Эти напряжения приводят к срабатыванию микровибраторы 5, укрепленные на конечностях обучающихся и сигнал зирующие о необходимости коррекции собственных действий. Обучающийся самостоятельно концентрирует внимание на конкретных особенностях управления с тем, чтобы принять решение относительно дальнейших действий.
Блок 20 оценки содержит блок 21 учета приоритета, блок определения времени успешных управлений 22, бло ранжирования 23 и блок формирования сигналов индукции ранга обучаемого 24.
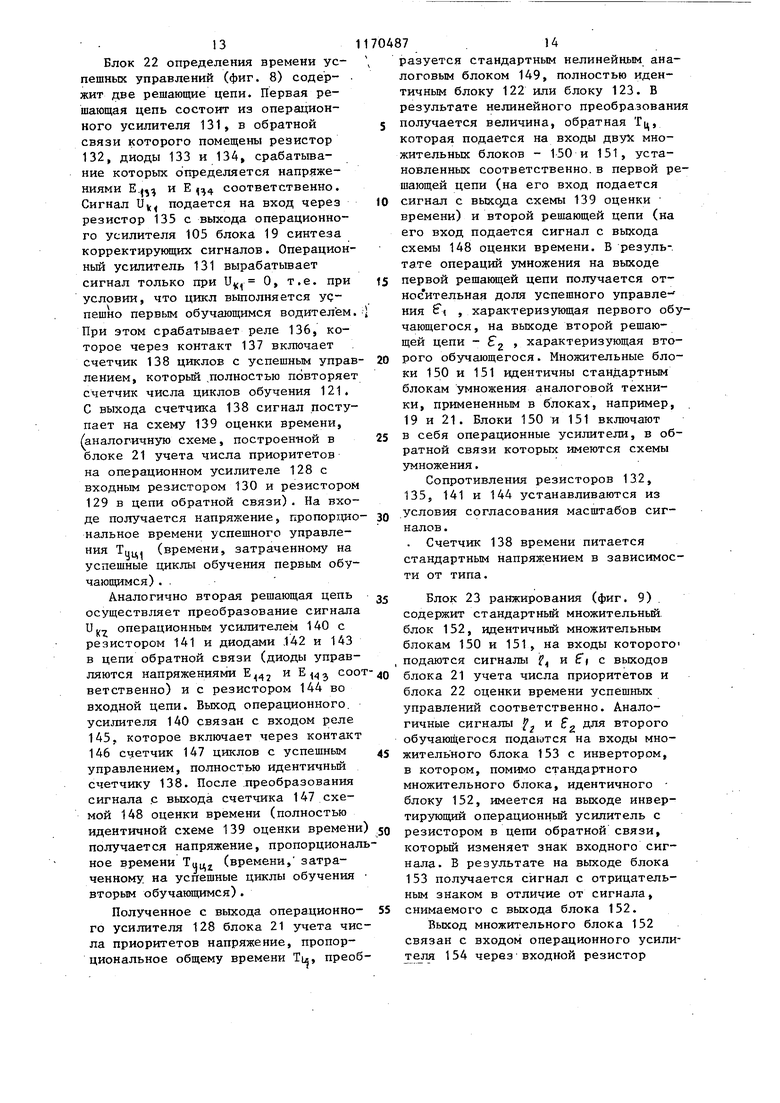
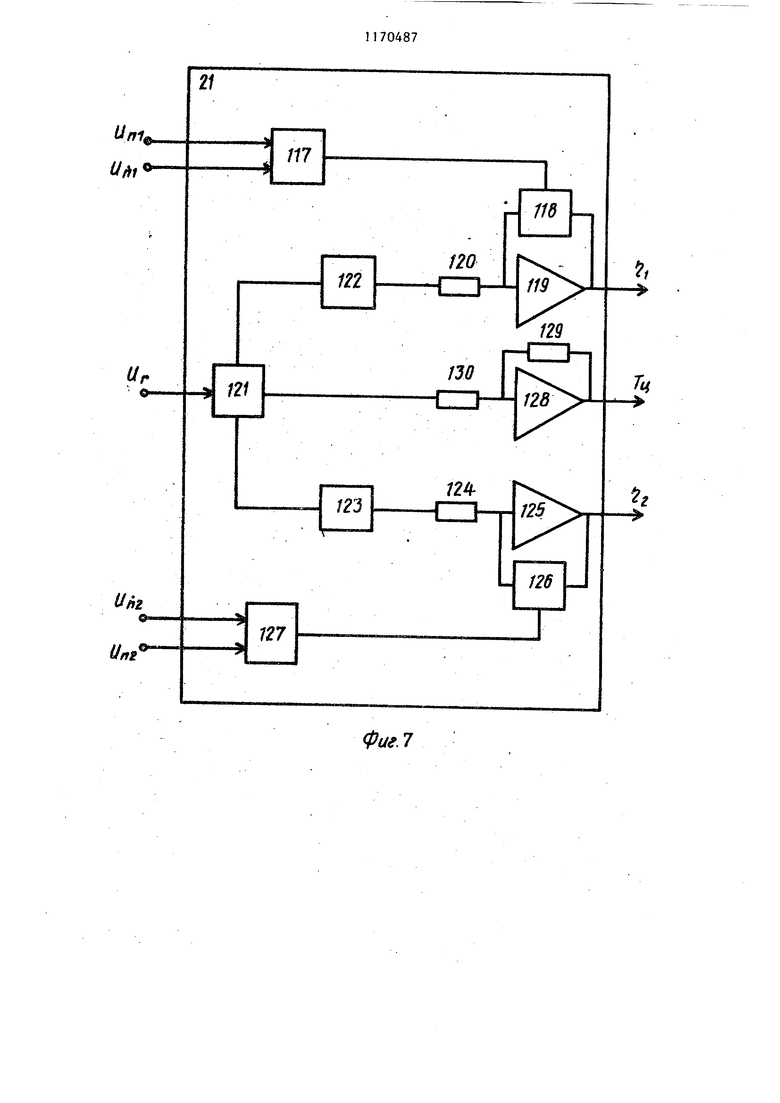
Блок 21 учета приоритета (фиг. 7) содержит три решающие цепи. Первая решающая цепь состоит из счетчика 117 числа приоритетов, осуществляющего выработку напряжения, пропорционального числу приоритетов, полученных первым обучающимся. На выходы счетчика 117 числа приоритетов подаются сигналы Uj, и U,:,, а выход счетчика соединен с входом множительного блока 118, включенного в цепь обратной связи операционного усилителя 119. на вход которого через входной резистор 120 подается напряжение, пропорциональное обратному значеншо. общего числа проведенных циклов, т.е. 1/Нц. Значение Ny получается путем преобразования сигнала Uj., подаваемого с выхода блока 11 выработки сигналов смены программ при вводе инструктором системы обучения в действие. Это преобразование осуществляется счетчиком 121 числа циклов обучения, представляющим собой счетчик импульсов, на выходе которого смонтирован стандартный цифроаналоговый преобразователь, выход которого соединен с нелинейным блоком 112, представляющим собой операционный усилитель.
7048712:
в цепи обратной связи которого помещена стандартная схема нелинейного преобразования (гиперболическая функция, набранная на диодных .элементах). На выходе нелинейного аналогового блока 122 получается функция, обратная числу циклов обучения, которая подается на вход операционного усилителя через резистор 120. Одновременно такой же нелинейньй аналоговый блок 123 подключен к выходу счетчика 121 числа циклов обучения для задействования второй решающей цепи, в которой выход нелинейного аналогового блока 123 соединен через резистор 124 с входом операционного усилителя 125, в. цепи обратной связи которого помещен множительный блок 126, на один 20 из выходов которого подается сигнал с выхода второго счетчика 127 числа приоритетов, аналогичного первому счетчику 117. На входы счетчика 117 подаются сигналы U.. и U с 25 выходов соответствующих операционных усилителей 70 и 82 блока 17 приоритетов. Сопротивления резисторов 120 и 124 в общем случае принимается равным 1 мОм каждый. 3Q В результате на выходе первой
решающей цепи получается сигнал fj . , а на выходе второй - сигнал , Величина 1 дпя данного обучающегося водителя означает, что число полученных им приоритетов равно числу циклов обучения, т.е. данный обучающийся водитель осуществляет повсеместно более успешное управление имитируемым транспортным средством, чем его напарник при групповом обучении. Значение О при зтом характеризует второго водителя. При переменных приоритетах значения Ч будут колебаться между
5 О и 1.
Третья решающая цепь осуществляет определение общего времени Т, обучения путем подачи сигнала с выхода счетчика 121 числа циклов
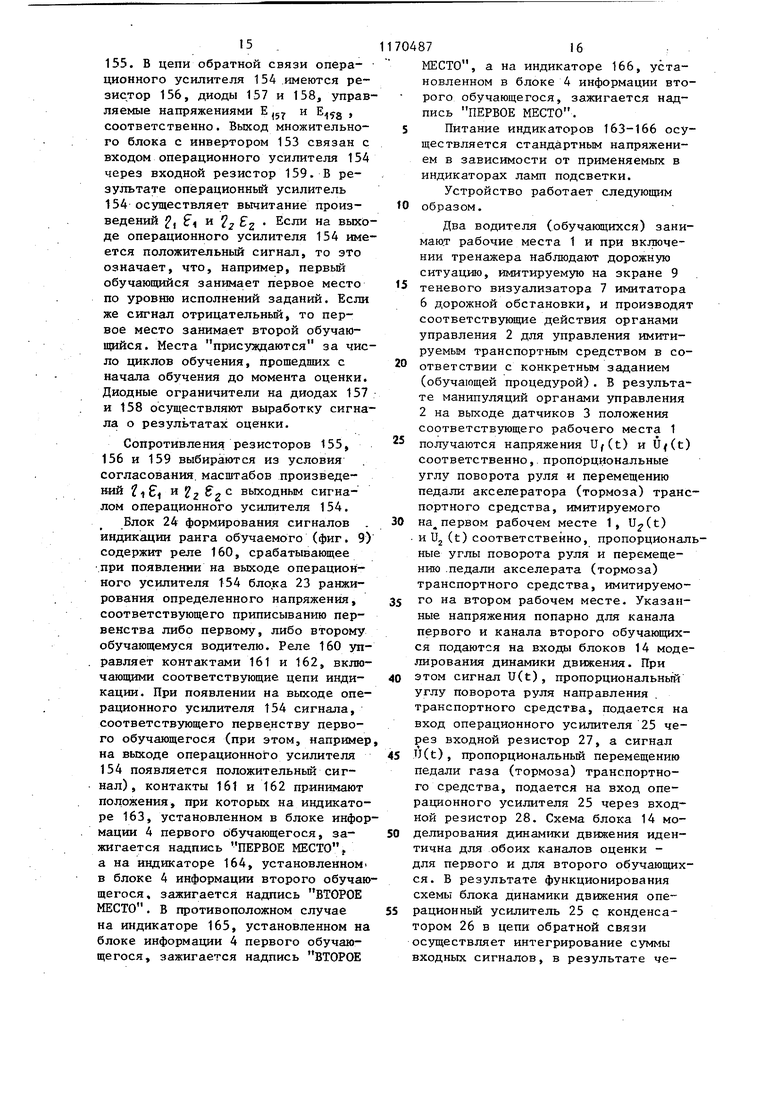
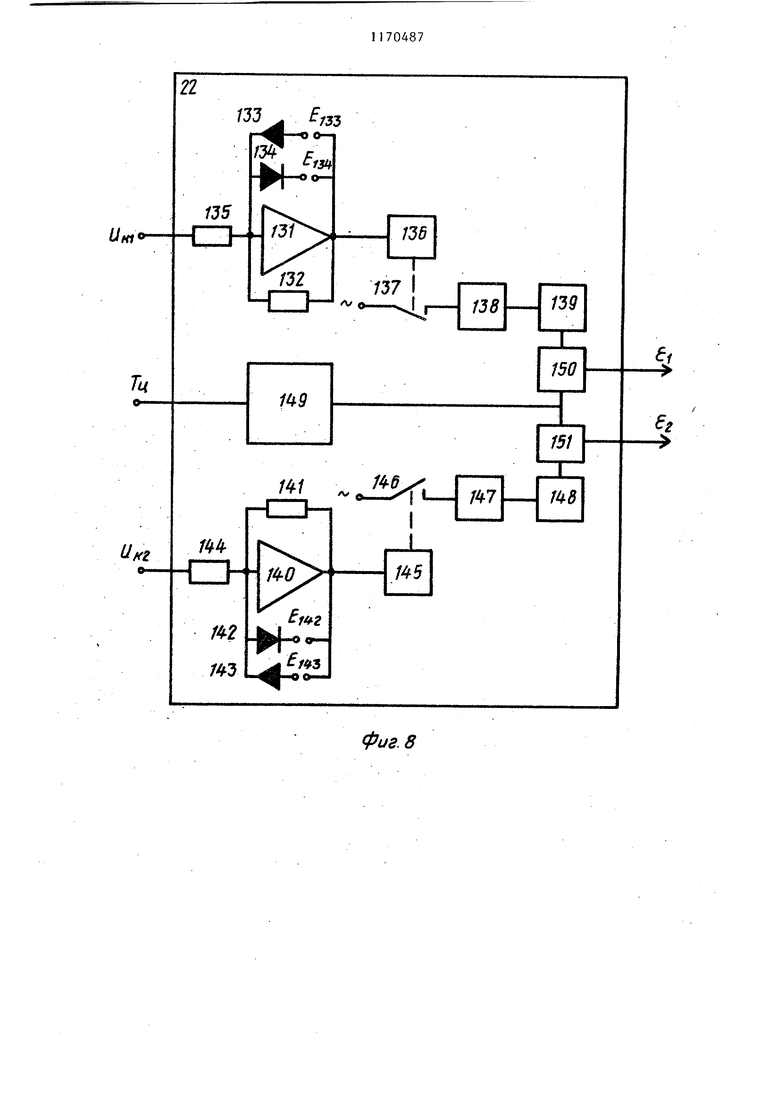
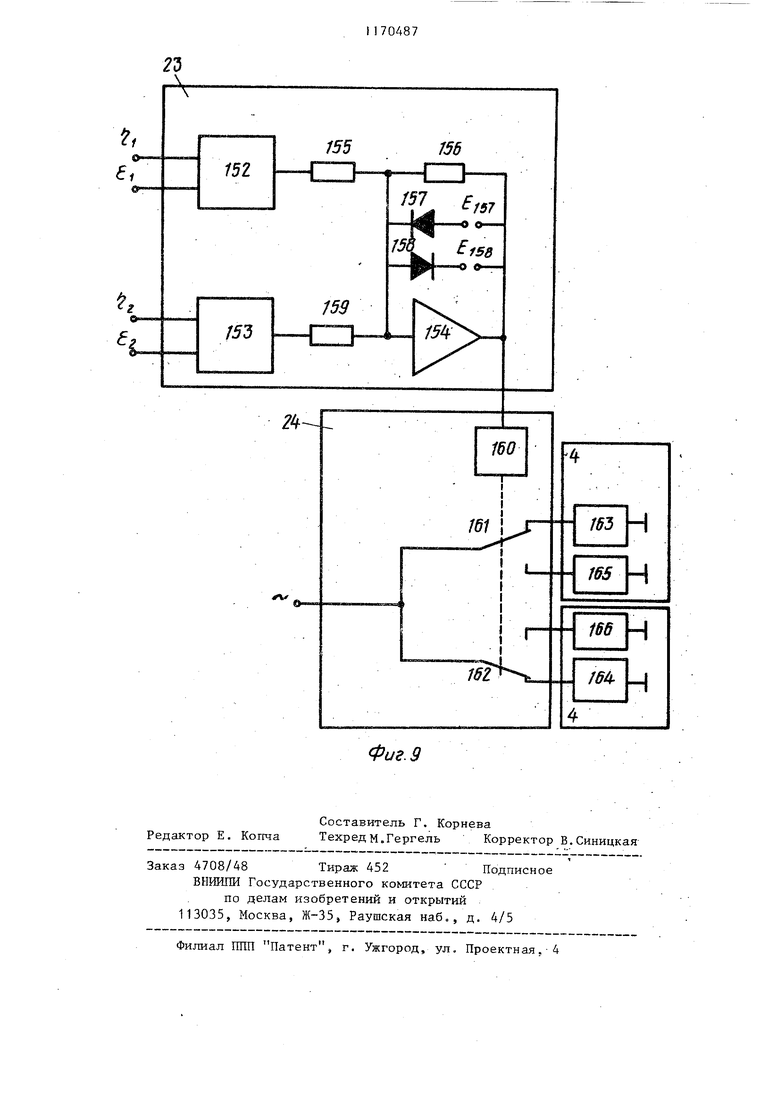
0 на вход операционного усилителя 128 с резистором 129 в цепи обратной связи через входной резистор 130. При этом отношение сопротивления резистора 129 к сопротивлению резистора 130 устанавливается таким образом, чтобы оно было равно времени осуществления одного цикла (в принятом масштабе). 13 Блок 22 определения времени успешных управлений (фиг. 8) содержит две решающие цепи. Первая решающая цепь состоит из операционного усилителя 131, в обратной связи которого помещены резистор 132, диоды 133 и 134, срабатывание которых определяется напряжениями Е., и Е 4 соответственно. Сигнал и подается на вход через резистор 135 с выхода операционного усилителя 105 блока 19 синтеза корректирующих сигналов. Операционный усилитель 131 вырабатывает сигнал только при U, О, т.е. при условии, что цикл выполняется успешно первым обучающимся водителем При этом срабатывает реле 136, которое через контакт 137 включает счетчик 138 циклов с успешным управ лением, который .полностью повторяет счетчик числа циклов обучения 121. С выхода счетчика 138 сигнал поступает на схему 139 оценки времени, /аналогичную схеме, построенной в блоке 21 учета числа приоритетов на операционном усилителе 128 с входным резистором 130 и резистором 129 в цепи обратной связи). На входе получается напряжение, пропоргщо нальное времени успешного управления Тмц. (времени, затраченному на успешные циклы обучения первым обучающимся) . , Аналогично вторая решающая цепь осуществляет преобразование сигнала U| операционным усилителем 140 с резистором 141 и диодами ,142 и 143 в цепи обратной связи (диоды управляются напряжениями 2 14з соо ветственно) и с резистором 144 во входной цепи. Выход операционного, усилителя 140 связан с входом реле 145. которое включает через контакт 146 счетчик 147 циклов с успешным управлением, полностью идентичньй счетчику 138. После .преобразования сигнала .с выхода счетчика 147 схемой 148 оценки времени (полностью идентичной схеме 139 оценки времени получается напряжение, пропорционал ное времени Тиц (времени, затраченному, на успешные циклы обучения BTopbw обучающимся). Полученное с выхода операционного усилителя 128 блока 21 учета чис ла приоритетов напряжение, пропорциональное общему времени Тц, преоб 7 . 14 разуется стандартным нелинейным аналоговым блоком 149, полностью идентичным блоку 122 или блоку 123. В результате нелинейного преобразования получается величина, обратная Тц, которая подается на входы двух множительных блоков - 150 и 151, установленных соответственно.в первой решающей цепи (на его вход подается сигнал с выхода схемы 139 оценки времени) и второй решающей цепи (на его вход подается сигнал с выхода схемы 148 оценки времени. В результате операций умножения на выходе первой решающей цепи получается относительная доля успешного управле- ния , характеризующая первого обучающегося , на выходе второй решающей цепи - 2 характеризующая второго обучающегося. Множительные блоки 150 и 151 идентичны стандартным блокам умножения аналоговой техники, примененным в блоках, например, 19 и 21. Блоки 150 и 151 включают в себя операционные усилители, в обратной связи которых имеются схемы З ножения. Сопротивления резисторов 132, 135, 141 и 144 устанавливаются из условия согласования масштабов сигналов . Счетчик 138 времени питается стандартным напряжением в зависимости от типа. Блок 23 ранжирования (фиг. 9) . содержит стандартный множительный, блок 152, идентичный множительным блокам 150 и 151, на входы которогоподаются сигналы f и f) с выходов блока 21 учета числа приоритетов и блока 22 оценки времени успешных управлений соответственно. Аналогичные сигналы 1 и 2 для второго обучающегося подается на входы множительного блока 153 с инвертором, в котором, помимо стандартного множительного блока, идентичного блоку 152, имеется на выходе инвертирующий операционный усилитель с резистором в цепи обратной связи, который изменяет знак входного сигнала. В результате на выходе блока 153 получается сигнал с отрицательным знаком в отличие от сигнала, снимаемого с выхода блока 152. Выход множительного блока 152 связан с входом операционного усилителя 154 черезвходной резистор
15
Сопротивления резисторов 155, 156 и 159 выбираются из условия согласования, масштабов произведений i6 выходным сигналом операционного усилителя 154.
Блок 24 формирования сигналов . индикации ранга обучаемого (фиг. 9) содержит реле 160, срабатывающее при появлении на выходе операционного усилителя 154 блока 23 ранжирования определенного напряжения, соответствующего приписыванию первенства либо первому, либо второму обучающемуся водителю. Реле 160 управляет контактами 161 и 162, включающими соответствующие цепи индикации. При появлении на выходе операционного усилителя 154 сигнала, соответствующего первенству первого обучающегося (при этом, например на выходе операционного усилителя 154 появляется положительньй сигнал) , контакты 161 и 162 принимают положения, при которых на индикаторе 163, установленном в блоке информации 4 первого обучающегося, зажигается надпись ПЕРВОЕ МЕСТО, а на индикаторе 164, установленном в блоке 4 информации второго обучающегося, зажигается надпись ВТОРОЕ МЕСТО. В противоположном случае на индикаторе 165, установленном на блоке информации 4 первого обучающегося, зажигается надпись ВТОРОЕ
7048716
МЕСТО, а на индикаторе 166, установленном в блоке 4 информации второго обучающегося, зажигается надпись ПЕРВОЕ МЕСТО.
S Питание индикаторов 163-166 осуществляется стандартным напряжением в зависимости от применяемых в индикаторах ламп подсветки.
Устройство работает следующим to образом.
Два водителя (обучающихся) занимаю.т рабочие места 1 и при включении тренажера наблюдают дорожную ситуацию, Имитируемую на экране 9 5 теневого визуализатора 7 имитатора 6 дорожной обстановки, и производят соответствующие действия органами управления 2 для управления имитируемым транспортным средством в соответствии с конкретным заданием
(обучающей процедурой). В результате манипуляций органами управления 2 на вьпкоде датчиков 3 положения соответствующего рабочего места 1
получаются напряжения Uf(t) и Uf(t) соответственно,, пропбрциональные углу поворота руля и перемещению педали акселератора (тормоза) транспортного средства, имитируемого
на, первом рабочем месте 1, IS(t)
и Uj(t) соответственно, пропорциональные углы поворота руля и перемещению .педали акселерата (тормоза) транспортного средства, имитируемого на втором рабочем месте. Указанные напряжения попарно для канала первого и канала второго обучающихся подаются на входы блоков 14 моделирования динамики движен-ия. При
этом сигнал U(t), пропорциональный углу поворота руля направления транспортного средства, подается на вход операционного усилителя 25 через входной резистор 27, а сигнал
TJ(t), пропорциональньй перемещению педали газа (тормоза) транспортного средства, подается на вход операционного усилителя 25 через входной резистор 28. Схема блока 14 моделирования динамтжи движения идентична для обоих каналов оценки для первого и для второго обучающихся. В результате функционирования схемы блока динамики движения oneрационньй усилитель 25 с конденсатором 26 в цепи обратной связи осуществляет интегрирование суммы входных сигналов, в результате че171
го получается напряжение, прбпорциональное скорости движения - Z(t) транспортного средства, имитируемого на соответствующем рабочем месте тренажерау со знаком минус, так как операционные усилители обладают инвертирующим свойством. Для получения положительного значения напряжения , пропорционального скорости движения транспортного средства 2;(t) , используется инвертирующий операционный усилитель 33 с резистором 36 в цепи обратной связи, на вход которого через входной резистор 34 подается сигнал с выхода операционного усилителя 25. Этот же результат для дальнейшего интегрирования подается на вход операционного усилителя 31 через входной резистор 32. На выходе операционного усилителя 31 уже получается значение координаты Z(t), которая представляет собой угол разворота имитируемого транспортного средства.
Таким образом, с помощью схемы блока 14 моделирования динамики движения моделируется система дифференциальных уравнений динамики движения транспортного средства, которая имеет ,,вид
+ + + , где Z, Z и Z - соответственно угол разворота, скорость движения и ускорение перемещения транспорного средства,
и и и - соответственно сигналы перемещения руля поворота и opiaнов управления скоростью (педали газа и торможения) ,
Оо ,а, ,а иЬд,1),- коэффициенты уравнения, формируемые на основании известных параметров соответст вующего транспортного средства, имитируемого на данном трнажере .
Формирование схемы блока модели.рования динамики движения на основе аналоговых типовых решающих блоков позволяет в итоге получать значения сигналов Z и Z для каждого из обучающихся без запаздывания, в реаль- ном масштабе времени, чем не наруша70487
18
ется адекватность имитации движения транспортного средства на групповом тренажере.
Полученные на выходах операционных усилителей 31 и 33 каяадого канала значения сигналов Z и Z подаются на соответствующие входы единого блока 16 логического контроля. При этом сигнал Z(t) подается на вход
операционного усилителя 40 через входной резистор 49, сигнал Z(t) на вход операционного усилителя 51 через входной резистор 60, сигнал ZjCt) - на вход операционного усилителя 44 через входной резистор 50 и сигнал ZxgCt) - на вход операционного усилителя 56 через входной резистор 61. Каждая из двух решающих цепей 16 логического контроля осуществляет логическое сопоставление пар сигналов: первая решающая цепь сопоставляет пару сигналов Zj(t) и Z2(t) с эталонным сигналом U (t), поступающим через входной резистор
48 на входы операционных усилителей 40 и 44; вторая решающая цепь осуществляет логи еское сопоставление пары сигналов Z| (t) и 7.(t) с эталонным сигналом и,. (t) , поступающим
через входной резистор 55 на входы операционных усилителей 51 и 56. Эталонные сигналы U(t) и U(t) поступают с входов блока 13 эталонных сигналов, причем каждый эталонный сигнал сформирован как желаемая функция изменения положения или скорости .имитируемого транспортного средства в данной задаче, поставленной инструктором перед обучающимися.
С помощью установочных напряжений 43 и операционньй усилитель 40 с диодньми ограничителями на диодах 42 и 43 осуществляет выработку напряжения Zi 1 при удовлетворении сигналом Z(t) условий О Z,(t) 5 l,(t). То же самое прои:;водит операционный усилитель 44 с диодными ограничителями 46 и 47,
настраиваемыми с помощью напряжений и Е. Аналогичные операции логического сопоставления производят операционный усилитель 51 и операционный усилитель 56. В итоге на
выходе операционного усипителя 40 вырабатывается сигнал Ujr, 1 при О Zy(t) It U,) или U, О при Z,(t) с О, или при Z,(t) и,т(ь). 19 На выходе операционного усилителя 44 - сигнал U 1 при О Z2 U(t) или О при Z2(t) 0, или при Z(t) U(t). На выходе операционного усилителя 51 - сигна и, 1 при О Z(t) U5(t) или 1/2, О при Z(t) О, или при 2 (t) U-,(t). На выходе операцио ного усилителя 56 - сигнал U при О ZjCt) Uj (с) или О при fe(t) О, или при Z(t) U,T(t В качестве единицы сигнала принимается уровень напряжения, регул руемый с помощью сопротивленир резисторов 48, 49, 50, 55, 60 и 61 в входных цепях и резисторов 41, 45, 52 и 57 в цепях обратной связи соо вётствукяцих операционных усилителей. При согласовании масштабов сигналов в предьщущих блоках все сопротивления резисторов в схеме блока логического контроля должны быть приняты 1 мОм. Сигнал Ц, (и U, l; 05, Ug, 1,- 05 и U2 {l/, о подаются на входы блоков определения приоритета 17 и формирования управ ляющих воздействий 19. При этом блок 17 определения приоритета включается управляющим сигналом Up, поступающим на обмотку реле 65 с выхода блока 11 выработки сигнала смены программ. После чего реле 65 включает контак 64, и через входные резисторы 66 и 67 на входы операционного интегрирующего усилителя 62 поступают стандартные напряжения +100 В и -100 В соответственно. Операционны усилитель 62 осуществляет интегрирование разности двух напряжений таким образом, что на выходе получается напряжение в в(ще понижающе ся экспоненциальной функции, кото рая поступает на входы одновременно двух операционных усилителей 69 и 70, в цепях обратной связи ко торых установлены стандартные аналоговые множительные блоки 73 и 74 соответственно, а на входы последние подаются напряжения, пропор циональные сигналам U. (с выхода операционного усилителя 40 блока 16 логического контроля) и Ну, (с выхода операционного усилителя 44 блока логического контроля 16). Та ким образом, на операционных усили телях 69 и 70 осуществляется пере720множение экспоненциальной функции, определякядей значимость действий обучающихся, с дискретными сигналами, определяющими успешность шти неуспешность их действий. В итоге получаются сигналы и„, и , характеризующие меры важности действий первого и второго обучающихся соответственно при управлении имитируемым транспортным средством по положению (т.е. при действии рулевым колесом). Тем самым каждому обучающемуся приписьюается определенный уровень приоритета (в дальнейшем - приоритет), выражаемьй в принятом масштабе определенным уровнем напряжения U и U соответственно. Одновременно с приписыванием приоритетов по управлению положением осуществляется приписывание приоритетов по управлению скоростью движения имитируемого транспортного средства с помощью схемы на операционных усилителях 75, 81 и 82. Операционньй усилитель 75 осуществляет в момент замыкания контакта 77 реле 78 интегрирование разности входных сигналов +100 В, поступающего через входной резистор 79, и -100 В, поступающего через входной резистор 80. Тем самым регулируются масштабы входных величин (напряжений) дпя операционного усилителя 75. Интегрирование приводит к экспоненциально понижакщемуся напряжению, определяющему значимость действий каждого из обучающихся по управлению скоростью. Полученпое напряжение подается на входы операционных усилителей 81 и 82, в непях обратной связи которых установлены стандартные аналоговые множительные блоки, на входы которых подаются полученные с выходов блока логического контроля напряжения IC, и U соответственно. В результате осуществляется попарное перемножение экспоненциальной функции на сигнал и и экспоненциальной функц1т на сигнал U, что приводит к получению приоритетов и- и U для первого и второго обучающегося соответственно по управлению скоростью имитируемых транспортных средств при выполнении задания на групповом тренажере. I. , . С помощью сопротивлений резисторов 71, 72, 83 и 84 регулируются «маештабы напряжений в первой и второй реошющих цепях блока 17 опреде ния приоритета. . Сигналы U;., .Ug, Uzi z хода блока 16 логического контроля поступают также на входы блока 19 формирования управляющих воздействий . При этом осуществляется логическое сопоставление, уже не пар си налов, соответствующих одному и то му же каналу управления, как это осуществляется блоком 17 определения приоритета, а сигналов, выраба тываемых блоком моделирования дина мики движений 14 калщого обучающегося. Тем самым блок 19 формирования управляющих воздействий осущес ляет выработку сигнала в обобщен,ном виде предупреждающего соответс вующего обучающегося о наличии в его действиях погрешностей в управ лении как рулем поворота, так .и органами управления скоростью дви.жения транспортного средства. Сигналы U;j, и и,через входные резисторы 109 и 110 соответственно подаются на входы схемы, сформированной на основе операционного уси лителя 105 с множительным блоком .106 и ограничителем на диодах 107 и 108, настраиваемых напряжениями и . Эта схема осуществляет перемножение сигналов U. и U и одновременно выработку дискретно го сигнала U|f 1, если хотя бы и Q, или и. О, что означает необходимость выработки коррекции своих действий первым обучающимся. Одновременно функционирует схема на операционном- усилителе 111, на вход которой подаются сигналы и - через входной резистор 115 и U,j - через входной резистор 116 Схема, включающая в себя множительный блок 112 и ограничитель на диодах 113 и 114 с управляющими напряжениями и Е осуществ ляет перемножение сигналов U и и и выработку сигнала 1 при условии равенства нулю хотя бы одного из сигналов Uj;. и Сигнал и поступает на исполнительный элемент 5 первого обучающегося, причем при он возбуждает микровибратор, ук. репленный на его конечности, предупреждая о наличии ошибок в действиях по управлению имитируемой 722 ездой. Сигнал не прекращается до выхода показателя управляемого транспортного средства (то ли по углу поворота, то ли по скорости) из области недопустимых значений и настзгпления успешного управления. Сигнал и,к2 - 1 О у поступает на вход исполнительных элементов 5 второго обучающегося, осуществляя действие, аналогичное описанному. Микровибраторы исполнительных элементов. 5 представляют собой малогабаритные преобразователи jianряя ния в низкочастотные колебания (1-50 Гц при длительности импульсов 5-10 Мс), широко используемые, например, в биоэлектрических устройствах типа протезов с обратной связью. Микровибратор укреппяется с помощью резинового ремешка на конечности (например на предплечье) обучающегося. Блок 18 смены управления, на входы которого поступают сигналы с выходов блока 17 определения приоритета: на входы первой решающей цепи - сигнал U через входной резистор 89 на вход операционного инвертирующего усилителя 87, на в 1ходе которого получается значение входного сигнала, но с обратным знаком, сигнал U - через входной резистор 95 на вход операционного усилителя 91, на входы второй решающей цепи - сигнал Ufi через входной резистор 98 на вход инвертирующего операционного усилителя 96, на выходе которого получается входной сигнал с обратным знаком, сигнал U, - через входной резистор 104 на вход операционного усилителя 100.. В результате функционирования первой решающей цепи блока 18 смены приоритета операционным усилителем 91 оценивается разность входных сигналовгприоритетов Ujj и Ujj, для первого и второго обучающихся соответственно по управлению положением имитируемых на тренажере транспортных средств одного и того же типа для каждого обучающегося. Результат сопоставления (разности сигналов) пропускается через ограничители на диодах 93 и 94, напряжение срабатывания которых устанавливает23ся через величины управляющих напря жений и Е- . Если разность сигналов на входе операционного усилителя 91 больше нуля, т.е. U(,j у Un2 сигнал на выходе Uy 1, что означает преимущество первого обучающегося перед вторым. При Ufij Upj сигнал на выходе будет QU 0, что означает смену приоритета по управлению положением транспортного средства (т.е. приоритета по управлению рулем пово рота каждым обучающимся). Вторая решающая цепь, получая с помощью операционного инвертирующего усилителя 96 отрицательное напряжение - U , производит сопоставление (оценку разности) сигналов и и Uo2 результат которого пропус кается через ограничитель иа диодах 102 и 103, управляемых напряжениями и Е0з| . В итоге на выходе операционного усилителя 100 получается сигнал.ил 1 при и Uf,2 что означает преимущество первого обучающегося перед вторым при управ лении скоростью имитируемого транспортного средства, или сигнал Ui О, что означает смену приоритета. Сигнал Uj ,- OJ и и О поступают на соответствующие вхо ды блоков датчиков 3 каждого рабочего места 1 Я стимулируют переключения соответствующего блока датчиков 3 ( блок 14 моделирования динамики движения) на управление имитатором 6 дорожной обстановки через блок 8 управления, откуда управление передается на визуализатор 7 тренажера. Тем самым приоритетный (т.е. наиболее успешно действзшщий) водитель приобретает возмсвкность управлять имитацией дорожной обстановки и задавать таким образом уровень сложности задания для своего напарника (второго обучанидегося). Это является некоторьм видом поощрения за лучшие показатели, достигнутые в процессе выполнения учебного задания. Одновременно второй обучающийся получает в некотором ваде штраф за недостаточно высокие уровни показателей выполнения того же учебного задания. Таким образом, в результате функционирования блока 16 логического контроля, блока 17 определения приоритета, блока 18 смены управ8724ления и блока 19 формирования управляющих воздействий осуществляется выработка сигналов оценки приоритетности деятельности каждого из двух обучающихся и в соответствии с этим передача управления имитацией более успешно действующему из группы. Помимо этого, указанные блоки осуществляют выработку сигналов для последующей итоговой оценки деятельности группы, обучающейся на групповом тренажере. Так, блок 17 определения приоритета синхронно с вьщачей описанных сигналов на выходы блока смены приоритета ввдает эти же сигналы на входы блока 21 учета приоритета, входящего в блок 20 оценки. Блок 21 учета приоритета с помощью счетчиков 117 и 127 осуществляет подсчет общего числа приоритетов, полученных соответственно первым и вторым обучающимися одновременно по каналу управления разворотом и по каналу управления скоростью имитируемого транспортного.средства. Одновременно счетчик числа циклов с цифроаналоговым преобразователем 121по сигналу управления U, подаваемому в момент пуска системы в действие инструктором с выхода блока 11 выработки сигналов смены программ, производит подсчет общего числа циклов Ыц обучения, гроведенных с данными обучающимися на групповом тренажере. Преобразователи 122и 123, идентичные по схемноконструкторскому исполнению, производят напряжение,.пропорциональное величине, обратной числу циклов Ыц. Напряжение, пропорциональное числу циклов, поступает также на вход операционного усилителя 128, отношение резис-тора в цепи 129 обратной связи которого к входному резистору . 130 выбирается равным значению среднего времени одного цикла. Таким образом, на выходе операционного усилителя 128 получается напряжение, пропорциональное (в принятом масштабе) значению общего времени обучения Тц. Поступление сигналов l/Nb на вход операционного усилителя 119 и аналогично усилителя 125 позволяет получить произведения сигналов, соответственно для первого обучающегося на схеме умножения, собран. 25 ной на операционном усилителе 119, а для второго обучающегося - на операционном усилителе 125. В итоге общее число приоритетов соответствующегося обучающегося делится на общее число циклов обучения, что позволяет получить относительное число приоритетов (т.е. успешных) циклов: о - для первого и 2 для второго обучающегося. Резисторы 120 и 124 настраиваются для согласования масштабов входных и выходных сигналов. Результат оценки времени Тц в фо ме напряжения поступает на вход блока 22 определения времени успешных управлений, на второй и третий входы которого поступают сигналы и. и с выхода операционных усилителей 105 и 111 соответственно блока 19 формирования управляющих воздействий. Так как корректирующие сигналы и. и UK соответствуют нали чию ошибок в действиях соответствующего обучающегося, то они легко могут быть применены для выработки сигналов, соответствующих времени, затраченному на успешное управление каждым обучающимся. Для этого сигналы U |f и U|c2 пропускаются через ограничительные схе мы, сформированные на операционных усилителях 131 и 140 соответственно включающие данные ограничители, кот.орые вырабатывают сигнал 1, ес 0. При ли сигналы и , О и U вьфаботке сигнала 1 операционным усилителем возбуждается обмотка реле 136, и контакт Т37 замыкается, пропуская напряжение питания (сетевое) на вход счетчика 138 циклов с успешньм управлением, откуда сигнал поступает на вход схемы 139 оценки времени, построенной по аналогии со схемой на операционном уси лителе 128 блока 21 учета приоритета, а результат оценки поступает на вход множительного блока 150, п строенного по аналогии с описанными множительными блоками (операционный усилитель с множительными схемами в цепи-обратной связи). На второй вход множительного блока 150 подает ся напряжение, пропорциональное об ратному значению общего времени циклов, т.е. 1/Тц. В итоге умножения получается отношение времени затраченного первым обучающим 7 ся на успешное управление, к времени Тц, т.е. относительное время 6, успешных управлений первого обучающегося. Аналогично на вход реле 1А5 с выхода операционного усилителя 140 поступает сигнал в случае, когда UK2 0. При этом контакт 146 замыкается и включает счетчик циклов с успешным управлением 14 второго обучающегося, откуда после обработки сигнала схемой оценки времени 148, сигнал поступает на вход множительного блока 151, на второй вход которого поступает сигнал, пропорциональный отношению 1/Тц. В итоге, на выходе множительного блока 151 получается сигнал fg соответствзтощий отношению общего времени fu , затраченному вторым обучающимся на успешное управление. к общему времени циклов Т Сигналы 8, и Е характеризуют относительную меру успешных циклов в процессе обучения группы на тренажере . После получения сигналов, характеризуинцих число приоритетов , и 2 и относительное .время успешного вьшолнения заданий f, и соответственно первым и вторым обучающимися, создается возможность итоговой оценки процесса обучения. Для этого синхронно с предьщущими блоками оценки функционирует блок 23 ранжирования, на входы которого подаются сигналы (попарно); j и f - на вход множительного блока 152, и fjj - на вход множительного блока с инвертором 153. Результаты перемножения указанных сигналов через входные резисторы 155 и 159 подаются на вход операционного усилителя 154 с диодным ограничителем в цепи обратной связи (на диодах 157 и 158 с управляющими напряжениями Е .„ и причем, масштабные настройки осуществляются с помощью сопротивлений резисторов 155, 156 и 159. Операционный усилитель 154 осуществляет вычитание (логическое сопоставление) произведений , fj и 2 г причем, на его выходе получается напряжение, равное 1, если | f i г равное О, если .ff гб,
271
Тем самым осуществляется ранжирование (определение места) обучающихся по достигнутым каждым из них уров ням качества выполненич учебных заданий .
Сигнал с выхода операционного усилителя 154 подается на обмотки реле 160 блока выработки результирующего сигнала 24 при сигнале, равном 1, реле осуществляет переброс контакта 161 в верхнее, а контакта
162- в нижнее положение, что приводит к высвечиванию на индикаторе
163первого обучающегося надписи ПЕРВОЕ МЕСТО, а на индикаторе 164 второго обучающегося надписи ВТОРОЕ МЕСТО. Соответственно при перебросе контактов 161 и 162 реле 160 на индикаторе 165 первого обучающегося высветится надпись ВТО048728
РОЕ МЕСТО, а на индикаторе 166 блока второго обучающегося - надпись, ПЕРВОЕ МЕСТО.
Там самым в итоге работы блока 5 20 оценки, каждый обучающийся получаем обобщенную информацию о занимаемом им месте в процессе группового обучения.
Ш Предлагаемое устройство позволяет организовать состязательные режимы обучения, что стимзлирует мотивы соперничества для получения лучших результатов управления транспортным средством в имитируемой ситуации. Тем самым создаются условия для выявления резервов повышения надежности, эффективности и качества системы водитель - транспортное
0 средство.
vP
/V
Na
A
t
i A
D
Cv4 to
i
Г
CsJ
::s -5$
СЛ CM
Г
ьь
fOOg S/nopaff реи/ающа ife/76
L-A
PTV
-cbJ
19
109
U21
f07
;
we
UHI -
115
Uz2
CDо-
.
-
т
о-
m frr
Eff3
Фиг. 6
фаг Л
фиг. 8
2Ъ
/55
. Ei58
159
-СЭ
/53
| Тренажер транспортных средств | 1981 |
|
SU1008765A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| , . | |||
