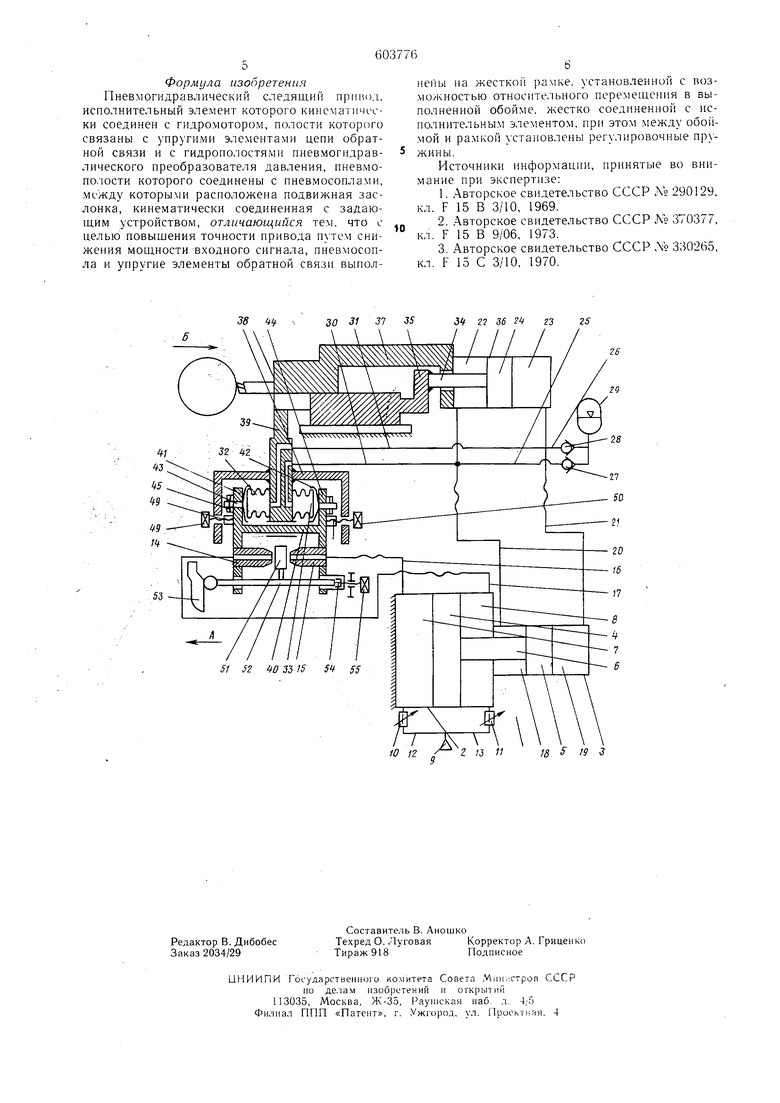
дроссели 10 и 11 по магистралям 12 и 13. Пневмополости 7 и 8 также соединены с пневмосоплами 14 и 15 магистралями 16 и 17. Гидрополости 18 и 19 соединены магистралями 20 и 21, соответственно, с полостями 22 и 23 гидромотора 24, которые связаны магистралями 25 и 26 через обратные клапаны 27 и 28 с аккумулятором 29, а также магистралями 30 и 31 с упругими элементами (сильфонами) 32 и 33 цепи обратной связи по нагрузке.
Шток 34 гидромотора 24 связан с неподвижной станиной 35, а гильза 36 кинематически соединена с подвижным исполнительным элементом (суппортом) 37. Обойма 38 и основания упругих элементов 32 и 33 связаны неподвижными гоединениями с траверсой 39 суппорта 37. Относительно обоймы подвижно установлена жесткая рамка 40, на которой укреплены пневмосопла 14 и 15.
Свободные торцы упругих элементов 32 и 33 упираются в конические чашки 41 и 42, которые пожаты регулировочными винтами 43 и 44 с контргайками 45 и 46, установленными в жесткой рамке 40, которая поджата регулировочными пружинами 47 и 48 с винтами 49 и 50. Подвижная заслонка 51 жестко связана с задающим устройством щупом 52, который поджат к щаблону 53 пружиной 54 сил11с.1 регулировочного винта 55.
Пневмогидравлический следящий привод работает следующим образом.
Сжатый воздух от источника 9 питания по магистралям 12 и 13 через дроссели 10 и 11 подается в пневмополости 7 и 8 преобразователя 1 и одновременно поступает в проходные (рчения рабочих окон усили.теля сопло-заслонка (зазоры между пнев.лосоплами 14 и 15 и подвижной заслонкой 51). Если зазоры ппевмосоплами и подвижной заслонкой равны между собой и отсутствует внешняя нагрузка на исполнительный э,1емент (суппорт) 37, то давления в пневмополостях 7 i. 8 ран: л между собой. При этом суппорт 37 неподвижен.
Если суппорту 37 сообшп-.ь продольную скорость задаюн1его движения, то щуп 5 будет пс1)емещаться в поперечном направлении, повторяя пр(филь шаблона 53. Поремеп1ение щупа 52 передается жестко связанной с ним заслонке 51, при том перераспределяются зазоры между пневмосоплами 14 и 15 и заслонкой 51 (проходные сечения рабочих окон становятся неравными).
При перемещении uJ,iia 52 по направлению стрелки ., наприме. влево, подвижная заслонка 51 переместится влево, при этом зазор между пневмосопло.м 14 и заслонкой 51 умень1ПИТСЯ, а зазор между пневмосоплом 15 и заслонкой 51, соответственно, увеличится. Это приводпт к увеличению давления в пневмополости 8. Под давлением поршень 4 и жестко связанный с ним поршень 5 переместятся влево. Так как гидрополости 18 п 19 соединены с полостями 22 и 23 гидромотора 24, то при перемещении поршня 5 жидкость из гидрополостп 18 вытесняется в полость 22 гмдромотора 24 (аккумулятор 29 служит для подпитки замкнутой гидроцепи гидроцилиндр 3гидромотор 24). Это вызывает перемещение влево
гпльзы 36 гидромотора 24, жестко связанного с ней суппорта 37 с режущим инструментом, траliepcbi 39 с обоймой 38 и охваченной ею жесгкой рамки 40 с пневмосоплами 14 п 15. Зазоры между пневмосоплами 14, 15 п подвижной заслонкой 51 сравняются, в системе восстановится равновесие. Так осуществляется отс.юживание перемещение щупа по положению (отработка системой управляющего воздействия) .
Если исполнительный элемент (суппорт) 37 воспринимает возмущение, например . изменение сопротивления резанию то из.меняется перепад давления на порщне гидромотора 24. Изменение давления в одной из полостей гидромотора 24 вызывает изменение давления и в одном из упругих элементов 32 или 33 по отнощению к другому, причем .максимальное давление в упругих элементах 32 и 33 устанавливается винтами 43 и 44 выще уровня номинального давления в полостях гидромотора 24. Например, если возмущение действует по направлению стрелки Б, т.е. вправо, то повыщается давление в полости 22 гидромотора 24 и, следовательно, повышается давление в полости упругого элемента 33. Под действием давления свободный торец (дно) элемента 33 переместится вправо, а так как свободный торец через коническую чашку 42, регулировочный винт 44 связан с жесткой рамкой 40, то последняя также переместится вправо. Это перемещение приводит к пропорциональному перераспределению зазоров .между пнев.мосоплами 14, 15 и подвижной заслонкой 51. Зазор между пневмосоплом 15 и заслонкой 51 увеличится, а между пневмосоплом 14 и заслонкой 51, соответственно, уменьщится: Такое из.менение зазоров приводит к изменению перепада давления на порщне 4 пневмоцилиндра 2. Порщень 4 пере.местится влево, и, в конечном итоге, влево переместится гильза 36, суппорт 37 с режущим инструментом, обойма 38 и жесткая рамка 40 с пневмосоплами 1.4 и 15. Зазоры между пневмосоплами 14, 15 и подвижной заслонкой 51 сравняются, в системе восстановится равновесие и ошибка от возмущающего воздействия будет скомпенсирована.
Таким образом, в процессе работы привода при одновременном действии управляющего и возмущающего воздействий из перемещения суппорта, обусловленного следящим движением щупа, автоматически вычитается движение.
Предлагаемый привод позволяет не то.тько компенсировать возмущения процесса обработки по величине усидия отжатИя режущего инструмента, но так же, что весьма важно для повышения скорости следящего привода, позволяет компенсировать по первой производной от этой величины.. Эта компенсация осуществляется так же, как ; описанная выше. Благодаря возможности настройки регулировочных элементов 41, 42, 47 и 48 полосу пропускания системой автоколебаний можно установить в диапазоне, оптимальном для заданных усдоадй отработки по предварительным натурным испытаниям.
Формула изобретения
Пневмогидравлический следящий привод, исполнительный элемент которого кинематически соединен с гидромотором, полости которого связаны с упругими элементами цепи обратной связи и с гидрополостями пневмогидравлического преобразователя давления, пневмопо.юсти которого соединены с пневмосоплами, между которыми расположена подвижная заслонка, кинематически соединенная с задающим устройством, отличающийся тем. что с целью повышения точности привода путем снижения мощности входного сигнала, пневмосопла и упругие элементы обратной связи выполнеГ1ы на жесткой рамке, установленной с возможностью относительного перемещения в выполненной обойме, жестко соединенной с исполнительным элементом, при этом между обоймой и рамкой установлены регулировочные пружины.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 290129, кл. F 15 В 3/10, 1969.
2.Авторское свидетельство СССР .К 370377, кл. F 15 В 9/06, 1973.
3.Авторское свидетельство СССР .о 330265, кл. F 15 С 3/10, 1970.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический следящийпРиВОд | 1978 |
|
SU802657A1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТАНЦИЯ | 1993 |
|
RU2086811C1 |
| Гидрокопировальный суппорт | 1977 |
|
SU691277A1 |
| Подвеска с рекуперацией энергии колебаний транспортного средства | 1990 |
|
SU1792847A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТАНЦИЯ | 1998 |
|
RU2133888C1 |
| Следящий привод | 1976 |
|
SU635296A1 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Гидрокопировальный многопроходный суппорт | 1977 |
|
SU680857A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТАНЦИЯ | 1992 |
|
RU2067695C1 |
38 f Г . / ж Ю 12 2. 13 5 19 3
