(54) гаДРОКОПИРОВАЛЬНЫЙ ЛШОГОПРОХОШЫЙ СУППОРТ
ния силового гидроцилиндра о.т источника давления при наезде барабана упоров на жесткий упор, сн.абженное толкателем взаимодействуклдим с барабаном упоров
Устройство автоматического отключения силового гидроцилиндра от источника давления Выполнено в виде {,1чажной системы, состоящей из рычага, закрепленного на поворотном двуплечем рьгчаге и взаимодействующего с одним плечом двуттлечего рычага, установленного на оси в корпусе, другое плечо которого поджимается пружиной к толкателю, контактирующему с барабаном упоров.
При наезде одного из регулируемых упоров на жесткий упор барабан упоров, перемещаясь в осевом напраВ;1ении, через толкатель нажимает на двуплечий рычаг, который,действуя на промежуточ ный рычаг, поворачивает двуплечий несущий щуп. Этот рычаг перемещает следящий золотник в вейтральное пойоженне, в результате чего рабочие полости силового цилиндра отключаются от источн(1ка давления.
В этом сутюрте рычажная система между б абан6м упоров в следящим золотником состоит из трек рычагов, дв из которых установлены на осях, причем ЭТИ рычаги проходят под суппортом по Всей его ширине. Шарнирные звенья, длинная передающая цепь от барабана упоров до конца следящего золотника и высокая инерционность системы не обеспечивают ста яьной устойчивости сдед оаего зопотника в нейтральном положении, в результате чего 4acno от источника давления может поступать в поршневую или щтоковую полости силового цилиндра, что приводит к нежелательным колебаниям суппорта, а следовательно, и резца. Кроме того, сложная рь:чажная система существенно загромождает конструкцию суппорта.
Цель изобретения - повышение устойчивости следящего золотника В нейтральном положении и упрощение конструкции суппорта.
Для этого устройство автоматического отключения следящего золотника выполнено в виде клинового механизма, ведущий элемент которого образован наклонной поверхностью на подпружиненном толкателе, а -ведомый элемент выпонен в виде втулки с кулачком, подвижно устанойпенной концентрично оси следящего золотника в корпусе последнего
и связанноЬ; с з-эпотником тягой, прк этом кулачок втулки взаимодействует с наклонной поверхностью на подпружиненном толкателе.
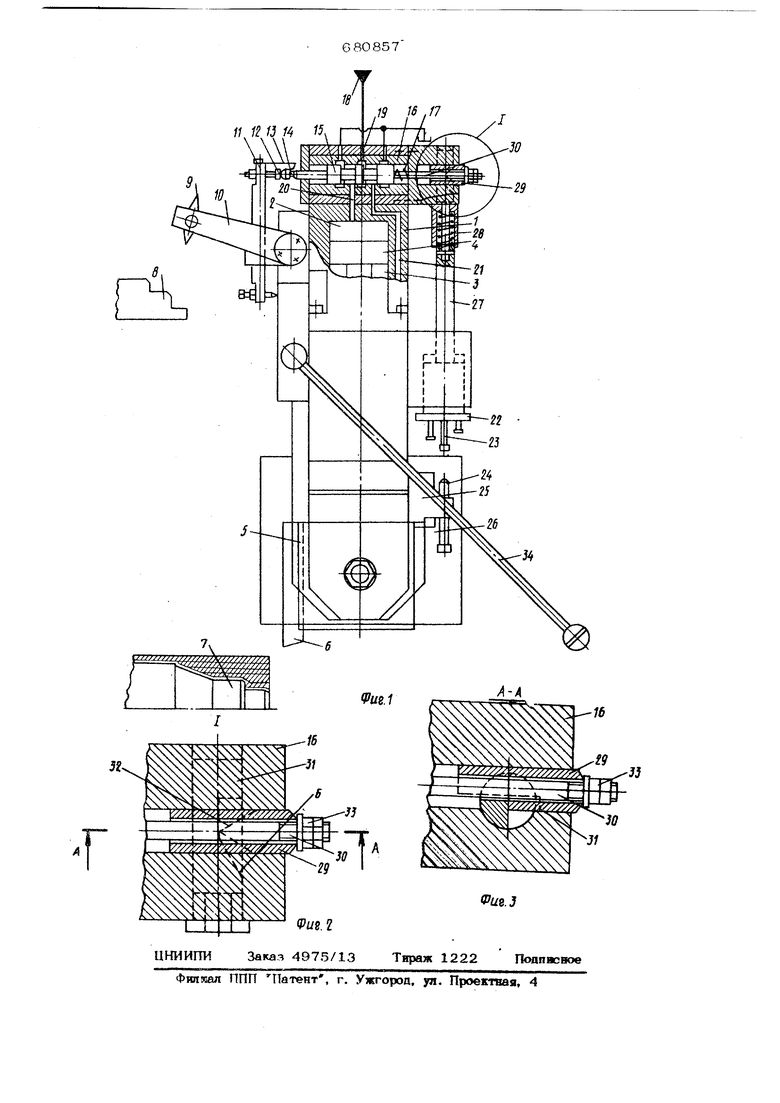
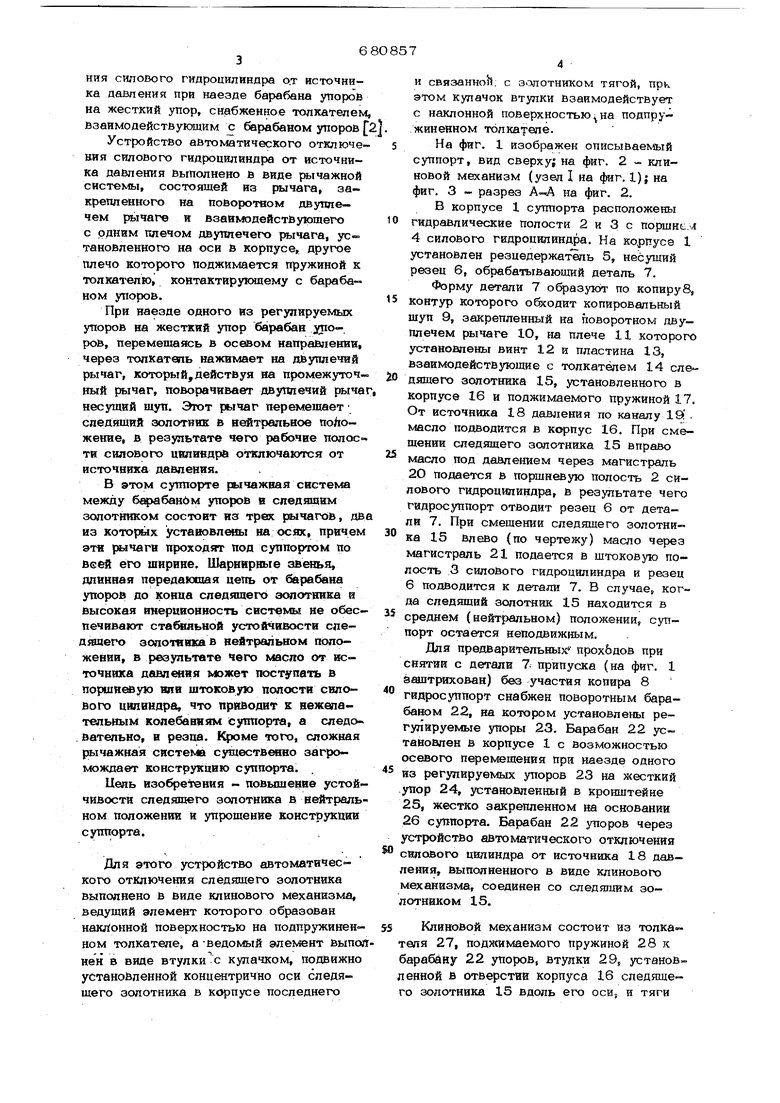
На фиг. 1 изображен описываемьгй суппорт, вид сверху на фиг. 2 - клиновой механизм (узел I на фиг. 1){ на фиг. 3 - разрез AWi на фиг. 2.
В корпусе 1 суппорта расположены гидравлические полости 2 и 3 с порщнь. 4 силового гидроиилиндра. На корпусэ 1 установлен резцедержатель 5, неЬуший резец 6, обрабатывающий деталь 7.
Форму детали 7 образуют по копирув, 5 контур которого обсодит копировальЕ1ый щуп 9, закрепленный на поворотном двуплечем рычаге 1О, на плече 11 которого установлены винт 12 и пластина 13, взаимодействующие с толкателем 14 следящего золотника 15, установленного в корпусе 16 и поджимаемого пружиной 17. От источника 18 давления по каналу 1Q . масло подводится в корпус 16. При смещении следящего золотника 15 вправо масло под давлением через магистраль 20 подается в порщневую полость 2 силового гидроципиндра, в результате чего гидросуппорт отводит резец 6 от детали 7. При смешении следящего золотника 15 Влево (по чертежу) масло через магистраль 21 подается в штоковую полость 3 силового гидроцнлиндра и резец 6 подводится к детали 7. В случае, ког.да след5 щий золотник 15 находится в среднем (нейтральном) положении, суппорт остается неподвижным.
Для предварительны) прох&дов при СНЯТИИ с детали 7 припуска (на фиг, 1 зшптрихован) без участия копира 8 гидросуппорт снабжен поворотным барабаном 22, на котором установлены регулируемые упоры 23. Барабан 22 установлен в корпусе 1 с возможностью осевого перемещения при наезде одного из регулируемых упоров 23 на жа:ткий упор 24, установленный в кронштейне 25, жестко закрепленном на основании 26 суппорта. Барабан 22 упоров через устройство автоматического отключения силового цилиндра от источника 18 давления, выполненного в виде клинового механизма, соединен со следящим золотником 15.
Клиновой механизм состоит из толка теяя 27, подхшмаемого пружиной 28 к барабану 22 упоров, втулки 29, установленной в отверстии корпуса 16 следящего золотника 15 вдоль его оси, и тяги ЗО, соединенной со следящим золотником 15, На участке 31 толкателя 27, входящем в отверстие корпуса 16, пернендикупярное оси следяшего золотника 15 со стороны, противоположной пле чу II рычага 10, имеется наклонная поверхность Б, взаимодействующая с У--образным кулачком 32, выполненным на втулке 29, Тяга 30 с зазором проходит сквозь отверстие Втулки 29 и соединена с ее торцом двумя гайками 3 Гидросуппорт может быть оснашен либо ручным, либо автоматическим устройством управления подводом и отводом суппорта. На фиг, 1 показана рукоятка 34 ручного управления, соединенная с поворотным двутшечим рычагом 10 (соединение на чертеже не показано). Для осуществления предварительных проходов рукояткой 34 ручного управления поворачивают двуплечий рычаг 10 {на чертеже - против часовой стрелки), врезультате чего следящий золотник 15, перемещаясь влево, через магистраль 2 соединяет штоковую полость 3 силового цилиндра с источником 18 давпевияЕ, а поршневую полость 2 через магистраль 2О - со сливом, и гидросуппорт переме щается к детали 7. В конае этого nejae мещения соответствукниий регулируемый утгор 23 контактирует с жестким упором 3.4. При взаимодействии упоров-барабан 22 перемещается в осевом направлении относительно корпуса 1 вместе с толкателем 27 и его участком 31, который своей наклонной поверхностью Б воздействует на V -образный кулачок 32 втулки 29, перемещая ее, а вместе с ней через тягу 30 следящий золотник 15, который но достижении среднего (нейтрального) положения отключает источник 18 давления от силового цилиндра, В .результате этого подвод гид. росуппорта к детали прекращается и включается продольная подача для первого предварительного прохода. По окончании прохода гидросуппорт возвращается в исходное положение. При этом барабан 22 упоров поворачивается в следующую позицию. Очередной пре варительный проход, осуществляется вьпдеописанным образом. По окончании предварительных проходов осуществляют получистовой и чисговой или только чистовой копировальные проходы по копиру 8 с использованием следящей системы без участия барабана упоров и устройства автоматического отключения силового гидроцилиндра от источника давления. Подобное Выполнение гидрокопироваль- ного суппорта позволяет повысить стабильность установки следящего золотника в среднем (нейтральном) положении при работе по упорам за счет сокращения передаточной цепи от барабана упоров к следящему золотнику и устранения зазоров в этой цепи. Стабильность положения следящего золотника исключает колебания суппорта в процессе обработки и увеличивает жестокость системы СПИД, Формула изобретения Гидрокопировальный многопроходный суппорт, например, к токарному станку, Выполненный в виде силового гидроцилиндра, управляемого следящим золотником от копировального щупа, подвижного барабана упоров и устройства автоматического отключения свдового цилиндра от источника давления: при взаимодействии барабана с жестким упором, содержащее подпружиненный толкатель, о т л ичаюши.йся тем, что, с целью повышения устойчивости следящего золотника .в нейтральном положенип и упрощения конструкции, устройство автоматического отключения следящего золотника выполнено в виде клинового механизма, ведущий элемент которого обраЗОВШ1 наклонной поверхностью на подпружиненном толкателе, а ведомый элемент выполнен в виде втулк-и с кулачком, подвижно установленной концентрично оси следящего золотника в корпусе посг деднего и сВязЙ1Ной с золотником тя,гой, при этом кулачок втулки взаимодействует с наклонной поверхностью на подпружиненном толкателе, Источники информации, принятые во внимание при экспертизе 1,Патент ФРГ № 2411511, кл, 49 Ж 35/О6, 1975. 2,Патент ФРГ № 2247486, кл, 49 m 35/О6, 1974. 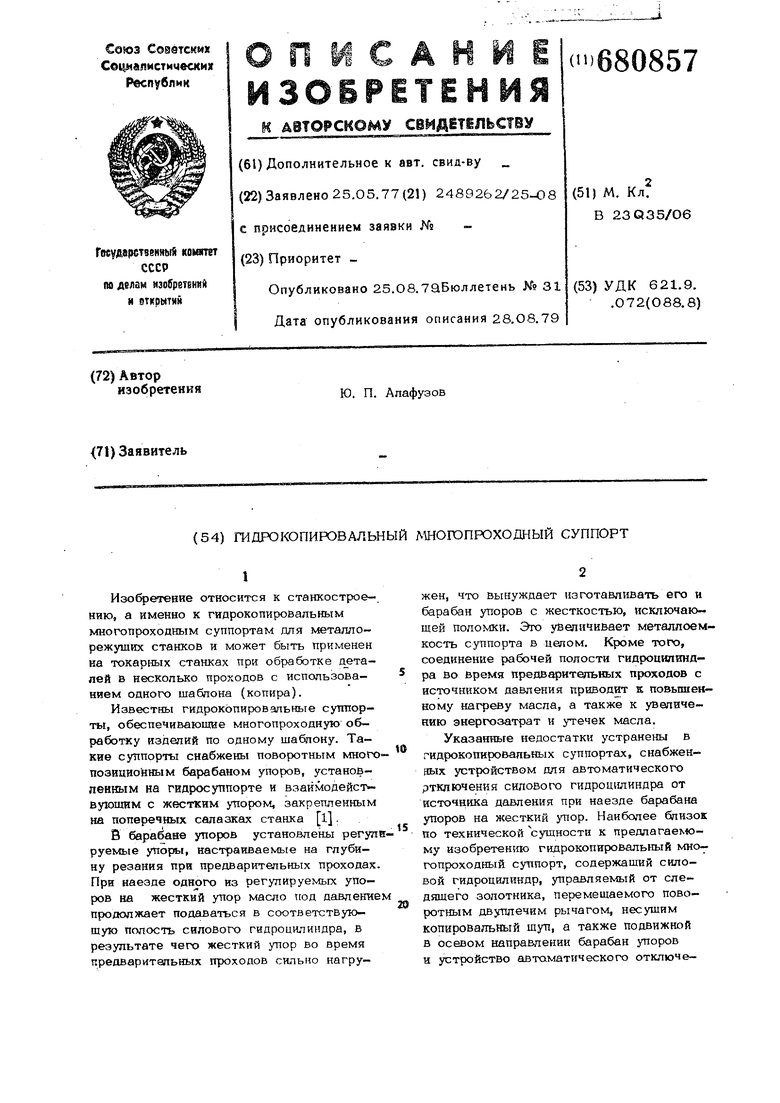
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрокопировальный многопроходной суппорт | 1977 |
|
SU707770A1 |
| Гидравлическое копировальное устройство | 1980 |
|
SU897473A1 |
| Гидрокопировальный суппорт | 1980 |
|
SU904997A1 |
| Гидрокопировальный многопроходный суппорт | 1982 |
|
SU1050849A1 |
| Гидрокопировальный суппорт | 1977 |
|
SU691277A1 |
| Гидрокопировальный суппорт | 1979 |
|
SU912478A1 |
| Управляющее устройство для гидрокопироваль-НОгО СуппОРТА | 1979 |
|
SU850353A1 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕГО ОТРЕЗАНИЯ КОЛЬЦЕВЫХ ЗАГОТОВОК НА ТОКАРНОМ СТАНКЕ | 1992 |
|
RU2049596C1 |
| Устройство для обработки деталей некруглой формы | 1976 |
|
SU724276A1 |
| Устройство для затылования | 1984 |
|
SU1199458A2 |