ханизма 7 подъема. На нижней раме 2 для предотвращения раскачивания кабины 4 понерек движения монорельсового ногрузчика установлены боковые обрезиненные ролики 9.
Кабина 4 разделена на машинное отделение, где смонтировано грузозахватное устройство, и отделение управления, где установлены электрический нульт 10 для управления горизонтальными и вертикальным перемещениями и гидрораснределитель И для управления работой грузозахватного устройства.
Приводы 5 и 7 позволяют перемещаться монорельсовому погрузчику и подниматься кабине 4 с транспортной и замедленной скоростями, для чего на направляющих 3 и на стеллаже установлены переключатели 12 и 13, а на верхней раме 1 и на кабине 4 закреплены фотореле 14 и 15.
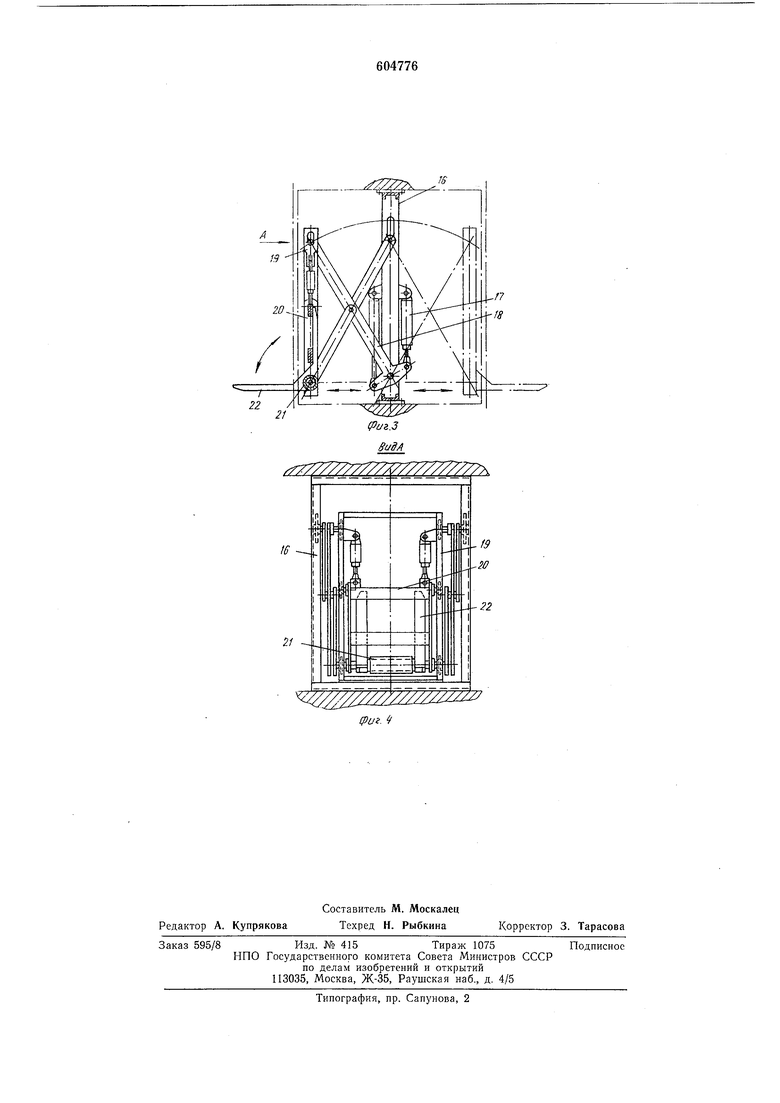
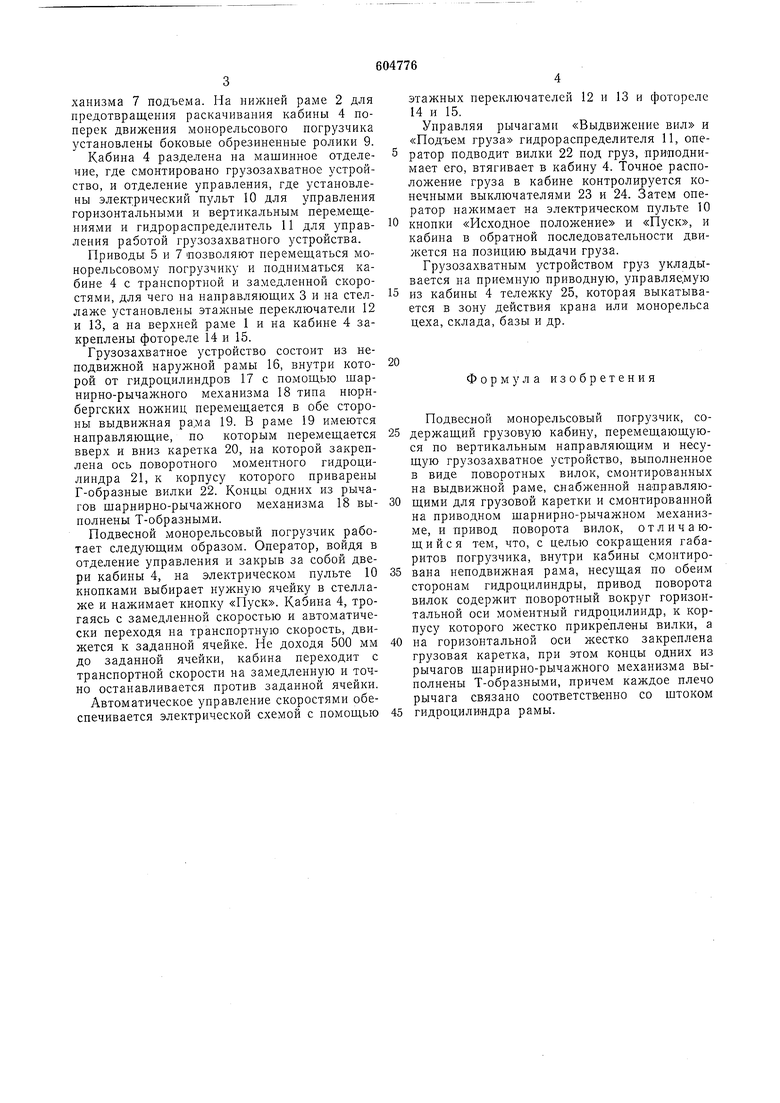
Грузозахватное устройство состоит из неподвижной наружной рамы 16, внутри которой от гидроцилиндров 17 с подмощью щарнирно-рычажного механизма 18 типа нюрнбергских ножниц перемещается в обе стороны выдвижная ра;ма 19. В раме 19 имеются направляющие, по которым перемещается вверх и вниз каретка 20, на которой закреплена ось поворотного моментного гидроцилиндра 21, к корпусу которого приварены Г-образные вилки 22. Концы одних из рычагов шарнирно-рычажного механизма 18 выполнены Т-образными.
Подвесной монорельсовый погрузчик работает следующим образом. Оператор, войдя в отделение управления и закрыв за собой двери кабины 4, на электрическом пульте 10 кнопками выбирает нужную ячейку в стеллаже и нажимает кнопку «Пуск. Кабина 4, трогаясь с замедленной скоростью и автоматически переходя на транспортную скорость, движется к заданной ячейке. Пе доходя 500 мм до заданной ячейки, кабина переходит с транспортной скорости на замедленную и точно останавливается против заданной ячейки.
Автоматическое управление скоростями обеспечивается электрической схемой с помощью
этажных переключателей 12 и 13 и фотореле 14 и 15.
Управляя рычагами «Выдвижение вил и «Подъем груза гидрораспределителя 11, оператор подводит вилки 22 под груз, приподнимает его, втягивает в кабину 4. Точное расположение груза в кабине контролируется конечными выключателями 23 и 24. Затем оператор нажимает на электрическом пульте 10
кнопки «Исходное положение и «Пуск, и кабина в обратной последовательности движется на позицию выдачи груза.
Грузозахватным устройством груз укладывается на приемную приводную, управляе.мую
из кабины 4 тележку 25, которая выкатывается в зону действия крана или монорельса цеха, склада, базы и др.
Формула изобретения
Подвесной монорельсовый погрузчик, содержащий грузовую кабину, перемещающуюся по вертикальным направляющим и несущую грузозахватное устройство, выполненное в виде поворотных вилок, смонтированных на выдвижной раме, снабженной направляющими для грузовой каретки и смонтированной на приводном шарнирно-рычажном механизме, и привод поворота вилок, отличающийся тем, что, с целью сокращения габаритов погрузчика, внутри кабины с.монтирована неподвижная рама, несущая по обеим сторонам гидроцилиндры, привод поворота вилок содержит поворотный вокруг горизонтальной оси моментный гидроцилиндр, к корпусу которого жестко прикреплены вилки, а
па горизонтальной оси жестко закреплена грузовая каретка, при этом концы одних из рычагов шарнирно-рычажного механизма выполнены Т-образными, причем каждое плечо рычага связано соответственно со штоком
гидроцилиядра рамы.
W
22
f7777/777777X77777// /77x
21
(риг.З 8и8А
/2222/
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНОЙ ЛЮНОРЕЛЬСОВЫЙ ПОГРУЗЧИК | 1965 |
|
SU175884A1 |
| КРАН-ШТАБЕЛЕР | 1968 |
|
SU426938A1 |
| Кран-штабелер | 1968 |
|
SU718342A2 |
| ВИЛОЧНЫЙ ПОГРУЗЧИК | 1991 |
|
RU2025462C1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| Устройство для азгрузки стеллажей штучными грузами и разгрузки их | 1974 |
|
SU547376A1 |
| ШИШУНМИНЕКАПдд | 1972 |
|
SU348462A1 |
| ПОДВЕСНОЕ ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 1992 |
|
RU2076841C1 |
| Склад штучных грузов | 1975 |
|
SU818968A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2006453C1 |