Изобретение относится к самоходным погрузчикам для обслуживания многоярусных стеллажей на складах длинномерных грузов.
Известны самоходные погрузчики, содержащие тележку, перемещающуюся по рельсам, с жестко закрепленными на ней вертикальными колоннами, по направляющим которых перемещается подъемно-опускная грузовая рама, имеющая захватное устройство в виде каретки с двумя зубьями по торцам и две пары горизонтальных направляющих для перемещения каретки и поддона, расположенных перпендикулярно направлению движения погрузчика.
Конструкция известного погрузчика не позволяет производить перестановку поддонов с грузом с одной стороны стеллажей на другую. Кроме того, при двустороннем расположении стеллажей для такого погрузчика необходима двусторонняя погрузочно-разгрузочная площадка.
Цель изобретения - повышение эффективности работы самоходного погрузчика.
Эта цель достигается тем, что захватного устройства предлагаемого погрузчика выполнены в виде поворотных рычагов, управляемых от привода, который установлен на каретке, а горизонтальные направляющие для ее перемещения смещены по вертикали относительно направляющих для перемещения поддона на величину, большую высоты каретки.
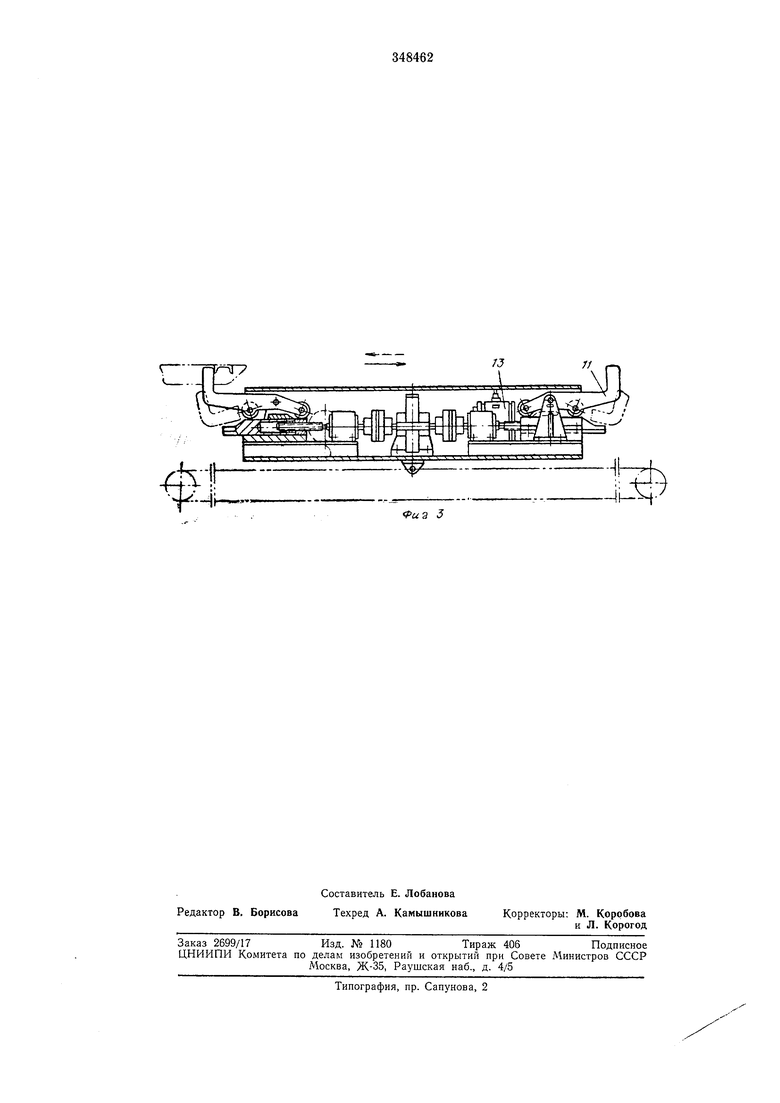
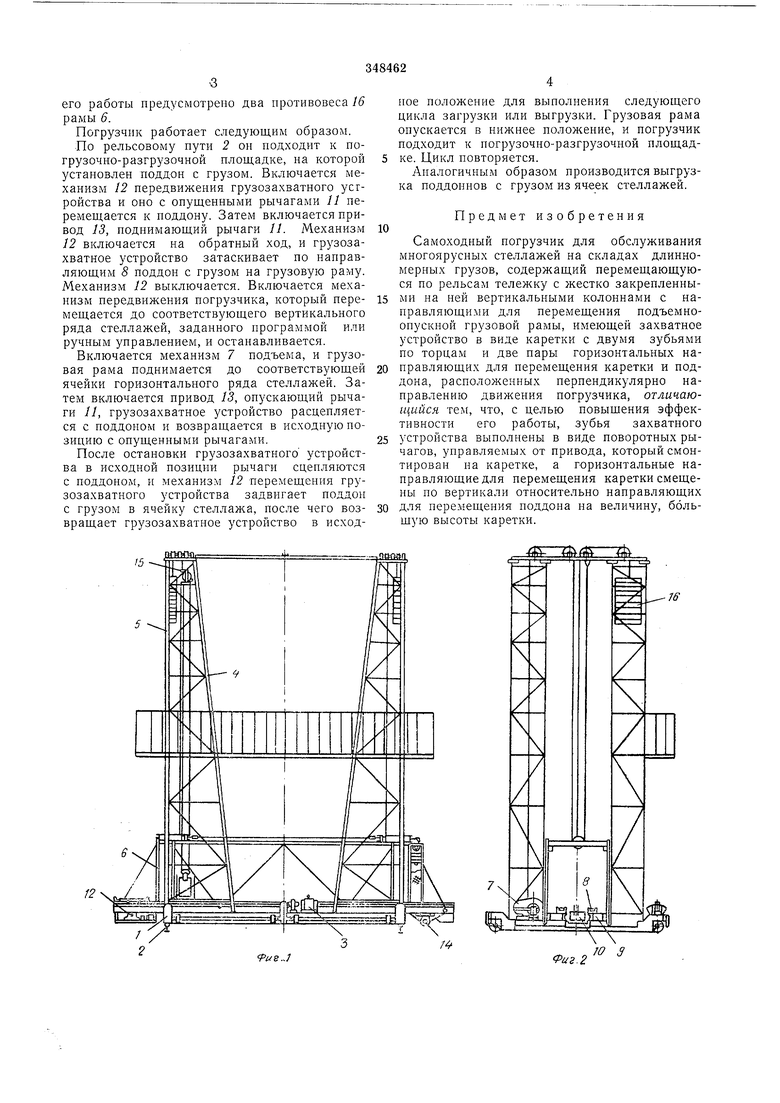
На фиг. 1 изображен описываемый погрузчик, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - грузозахватное устройство, разрез.
На тележке 1, перемещающейся по рельсовому пути 2 от механизма передвижения 3, установлены вертикальные колонны 4 с направляющими 5, по которым перемещается подъемно-опускная грузовая рама 6. Вертикальное перемещение рамы осуществляется механизмом 7 подъема. На раме 6 установлены горизонтальные направляющие 8 в виде
рольганга, по которому перемещаются поддоны с грузом. Ниже направляющих 8 смонтирована другая пара направляющих 9. На последних установлено захватное устройство в виде каретки 10, имеющее с обеих сторон
зубья в виде поворотных рычагов 11. Для перемещения каретки 10 по направляющим 9 на раме 6 установлен механизм перемещения 12. Для подъема и опускания рычагов // при сцеплении с поддоном на каретке 10 установлен электропривод 13, питание к которому подается через токосъемник с кабельным барабаном 14, установленным на грузовой раме б. В верхней части колонны 4 установлен ограничитель скорости 15, а для обеспечения
его работы предусмотрено два противовеса 16 рамы 6.
Погрузчик работает следующим образом.
По рельсовому пути 2 он подходит к погрузочпо-разгрузочной площадке, на которой установлен поддон с грузом. Включается механизм 12 передвижения грузозахватного устройства и оно с опущенными рычагами 11 перемещается к поддону. Затем включается привод 13, поднимающий рычаги 11. Механизм 12 включается на обратный ход, и грузозахватное устройство затаскивает по направляющим 8 поддон с грузом на грузовую раму. Механизм 12 выключается. Включается механизм передвижения погрузчика, который перемещается до соответствующего вертикального ряда стеллажей, заданного программой или ручным управлением, и останавливается.
Включается механизм 7 подъема, и грузовая рама поднимается до соответствующей ячейки горизонтального ряда стеллажей. Затем включается привод 13, опускающий рычаги 11, грузозахватное устройство расцепляется с поддоном и возвращается в исходную позицию с опущенными рычагами.
После остановки грузозахватного устройства в исходной позиции рычаги сцепляются с поддоном, и механизм 12 перемещения грузозахватного устройства задвигает поддон с грузом в ячейку стеллажа, после чего возвращает грузозахватное устройство в исходГ5
пое положение для выполнения следующего цикла загрузки или выгрузки. Грузовая рама опускается в нижнее положение, и погрузчик подходит к погрузочно-разгрузочной площадке. Цикл повторяется.
Аналогичным образом производится выгрузка поддоннов с грузом из ячеек стеллажей.
Предмет изобретения
Самоходный погрузчик для обслуживания многоярусных стеллажей на складах длинномерных грузов, содержащий перемещающуюся по рельсам тележку с жестко закрепленными на ней вертикальными колоннами с направляющими для перемещения подъемноопускной грузовой рамы, имеющей захватное устройство в виде каретки с двумя зубьями по торцам и две пары горизонтальных направляющих для перемещения каретки и поддона, расположенных перпендикулярно направлению движения погрузчика, отличающийся тем, что, с целью повыщения эффективности его работы, зубья захватного
устройства выполнены в виде поворотных рычагов, управляемых от привода, который смонтирован на каретке, а горизонтальные направляющие для перемещения каретки смещены по вертикали относительно направляющих
для перемещения поддона на величину, большую высоты каретки.
гтшм
Г
/4 5
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНЫЙ ПОГРУЗЧИК | 1967 |
|
SU200485A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| КРАН-ШТАБЕЛЕР | 1968 |
|
SU426938A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Устройство для загрузки и разгрузки многоярусных стеллажей | 1979 |
|
SU893733A1 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |