Предметом изобретения является приспособление к гидравлическому ковочному прессу для ограничения хода манипулятора, отличающееся тем, что на манипуляторе установлен отжимаемый вниз пружиной стержень, который в нижнем положении удерживается защелкой. Стержень служат для воздействия на клапаны гидравлических распределительных коробок.
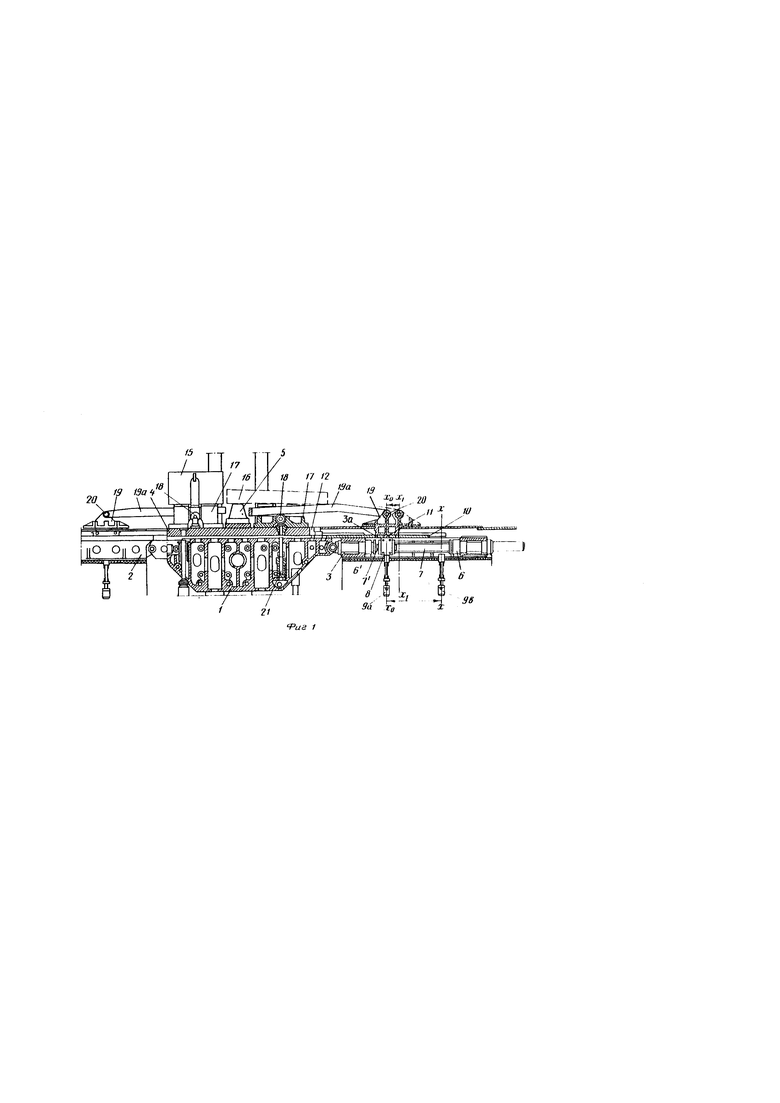
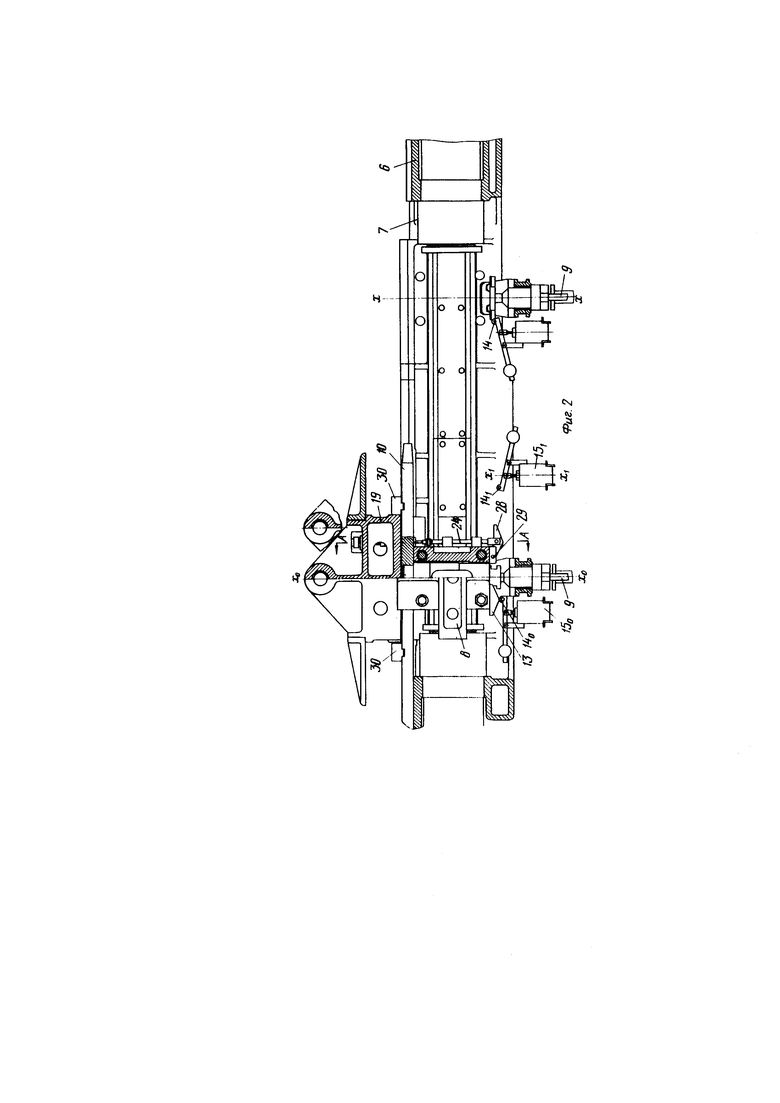
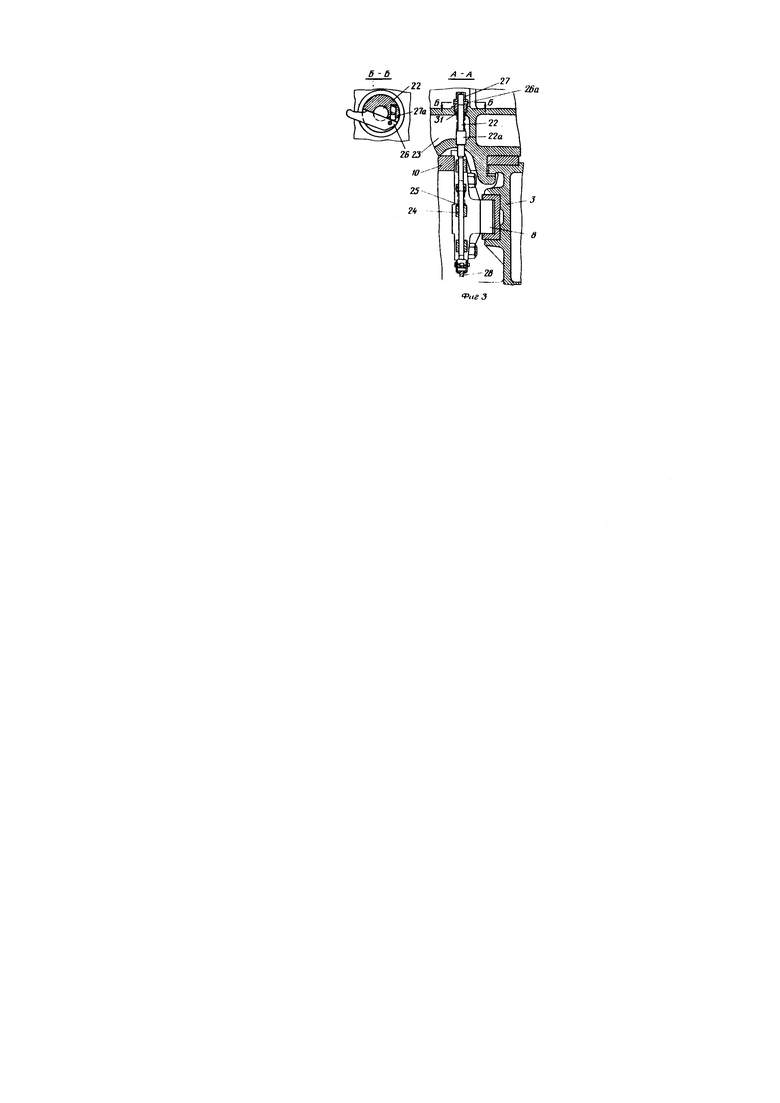
На фиг. 1 показан общий вид гидравлического ковочного пресса с манипуляторами, снабженными предлагаемым приспособлением, в вертикальном продольном разрезе; на фиг. 2 - вид крайней правой станины пресса с манипулятором и гидравлическим устройством для передвижения стола; на фиг. 3 - разрез по А-В на фиг. 2; на фиг. 4 - разрез по С-Д на фиг. 3.
Средняя станина 1 пресса (фиг. 1) связана с левой и правой станинами 2 и 3, в которых помещаются гидравлические устройства для передвижения стола 4, несыщего боек 5.
Когда пресс работает как ковочный, стол 4 с бойком передвигается гидравлическим устройством под пресс, расположенный над серединой средней станины.
Гидравлическое устройство каждой станины состоит из цилиндров 6 и 6′ с плунжерами 7 и 7′, между которыми расположен ползун 8. В станинах 2 и 3 в определенных точках помещаются гидравлические приспособления 9а и 9в для включения в ленту 10, служащую для передвижения стола 4, стопора 11, связывающего ползун 8 с лентой. Лента, в свою очередь, при помощи штыря 12 разъемно соединяется со столом 4, несущим боек 5.
Ползун 8 снабжен двусторонним клином 13 (фиг. 2). В положении ползуна 8 на оси ХО-ХО вершина клина 13 находится над роликом 14О гидравлической распределительной коробки 15О, управляющей впуском вода в цилиндр 6, отжимая рычаг ролика 14О вниз (впуск воды). Вследствие этого плунжер 7′ цилиндра 6′, передвигаясь вправо, перемещает ползун 8, который лентой 10 при помощи штыря 12 тянет за собой стол 4. Дойдя при своем движении вправо до оси Х-Х, ползун 8 своим клином 13 нажимает на ролик 14 рычага.
Выключив в положении Х-Х стопор 11 при помощи устройства 9в из ленты 10и подав воду в цилиндр 6, можно перегнать ползун 8 влево до положения XО-XО и, включив стопор 11 в другое отверстие ленты при помощи устройства 9а, передвинуть стол 4 еще на один рабочий ход вправо.
Если пресс должен работать с манипулятором, который служит для подачи заготовок 15 под пресс на боек 5 и для дальнейшей их расковки -  16, на стол 4 устанавливают опору 17 со свободно вращающимися роликами 18, а на боковых станинах помещают манипуляторы 19, состоящие из поворотного на шарнире 20 рычага 19а, опирающегося на ролик 18, для подъема которого вместе с рычагом 19а служит гидравлическое устройство 21.
16, на стол 4 устанавливают опору 17 со свободно вращающимися роликами 18, а на боковых станинах помещают манипуляторы 19, состоящие из поворотного на шарнире 20 рычага 19а, опирающегося на ролик 18, для подъема которого вместе с рычагом 19а служит гидравлическое устройство 21.
Манипулятор 19 снабжен приспособлением для ограничения его хода (фиг. 2 и 3), состоящим из двух частей одна из которых расположена на манипуляторе, а другая - на ползуне 8, причем обе части при смыкании манипулятора с ползуном составляют одно целое. Вертикальный штырь 22 приспособления верхним концом входит в отверстие ввинченной в тело манипулятора гайки 23. Штырь имеет утолщение 22а, в которое упирается пружина 23, отжимающая его вниз. Нижний конец штыря упирается в верхний конец стержня 24, вертикально подвижно установленного в направляющих ползуна 8 и поджимаемой пружиной 25 к концу штыря 22. Пружина 23 сильнее пружины 25, вследствие чего стержень 24 удерживается все время в своем нижнем положении. Ход стержня 24 и штыря 22 вверх ограничивается защелкой 26 (фиг. 4), расположенной в пазу 26а гайки 27. При помощи подпружиненного штифта 27а защелка удерживается в положении, препятствующем перемещению штыря 22 вверх, но ее можно отвести в сторону за выступающий наружу конец и дать таким образом штырю проход вверх.
Нижний конец стержня 24 снабжен поворотным двусторонним клином 28, одним своим плечом шарнирно укрепленным на ползуне 8 (фиг. 2) в точке 29.
Перед установкой манипулятора надо удалить штырь 12, отключить стол 4 от ленты 10 и, подав воду в цилиндр 6′, перегнать ленту без стола вправо, в уширенную часть станины 3. При установке манипулятора 19 он своими штырями 30 входит в соответствующие отверстия или углубления ленты 10. После этого манипулятор (например, правый) должен быть передвинут к оси пресса, т.е. от оси Х-Х влево до оси XО-XО. Чтобы передвинуть манипулятор подают воду в цилиндр 6, и ползун 8 посредством стопора 11 лентой 10 при помощи штырей 30 подтягивает манипулятор влево.
При переходе манипулятора через ось Х1-Х1, где установлена распределительная коробка 151 гидравлического устройства, защелку 26 отводят в сторону. При этом клин 28, переходя через ролик 14 рычажного механизма распределительной коробки 151, поворачивается на своей оси 29 и передвигает стержень 24 вверх, преодолевая действие пружин 31 и 25, так как усилие, действующее на ролик 14 снизу, больше давления этих пружин.
При дальнейшей работе манипулятора защелка 26 должна быть отпущена. Когда он подходит к оси ХО-ХО, а клин 13 оказывается на ролике 14O коробки 15О, верхний торец штыря 22 упирается в горизонтальную плоскость защелки, 28 под влиянием этого сопротивления заставляет несущий ролик 14О рычаг распределительной коробки 15О опуститься и прекратить доступ воды в цилиндр 6, что вызывает остановку ползуна 8 и манипулятора 19. Теперь манипулятор настроен на длину хода ХОХО-Х1Х1, который и является его рабочим ходом, в пределах которого манипулятор может передвигать сляб 16 от бойка 5 на опору 17 и обратно.
Когда манипулятор подходит к оси Х1-Х1 клин 28 нажимает на ролик 141 коробки 151, подача воды в цилиндр 6′ прекращается, манипулятор останавливается.
Если пресс должен работать без манипулятора, последний выводят в положение, совпадающее с осью Х-Х и защелку 26 отводят в сторону.
После снятия манипулятора стержень 24, не находясь более под действием штыря 22 и защелки 26, не препятствует отклонению клина 28 роликом 14, не отжимая его книзу, вследствие чего ход стола 4 этим приспособлением не ограничивается.
Приспособление к гидравлическому прессу для ограничения хода манипулятора, отличающееся применением установленного на манипуляторе отжимаемого вниз пружиной 22 стержня 25, удерживаемого в нижнем положении защелкой 26 и служащего для воздействия на клапаны гидравлических распределительных коробок К1.
