(54) УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ИСПЫТАНИЙ ОБРАЗЦОВ И КОНСТРУКЦИЙ НА ПРОЧНОСТЬ
объекта в пространстве, что уменьшает погрешностм в прикладываемых нагрузках за счет действия системы стабилизации и обеспечивает возможность испытаний незакрепленных конструкций.
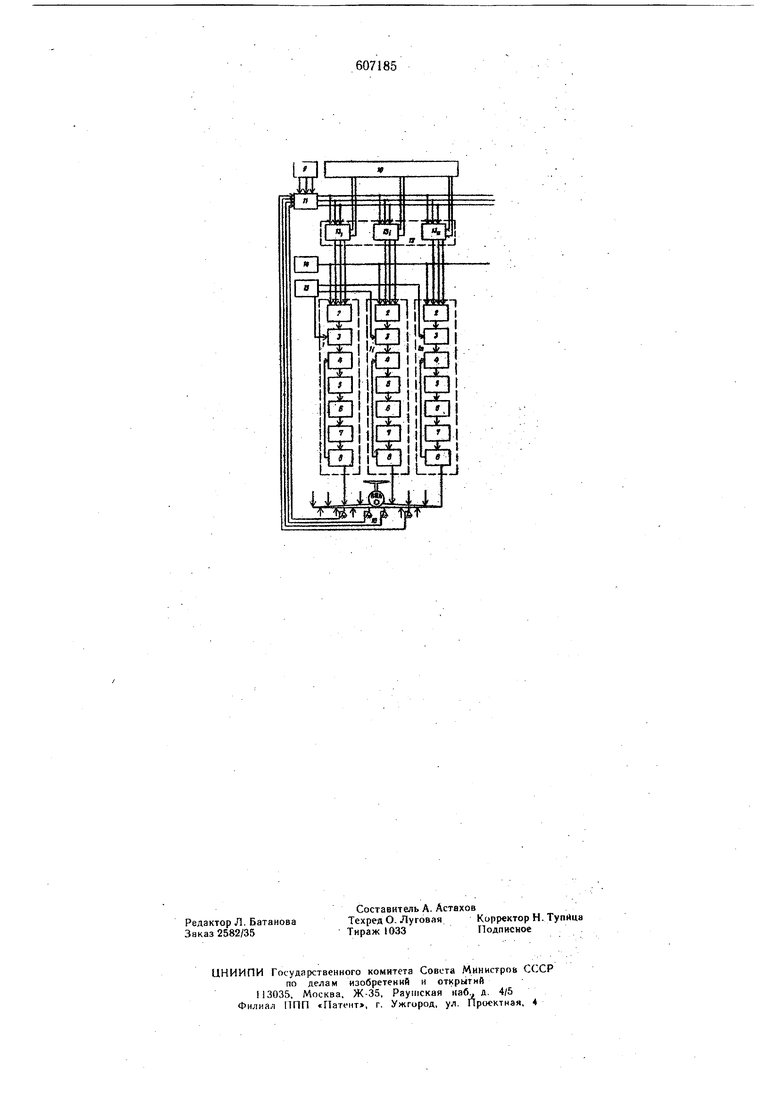
На чертеже изображена блок-схема устройства.
Устройство содержит п идентичных электрогидравлических следящих приводов с обратной связью по усилию, каждый из которых включает входной сумматор 2, масштабирующий элемент 3, устройство 4 выделения сигнала ошибки, усилитель 5 ошибки, электрогидравлнческий преобразователь 6, гидравлический силовозбудитель 7 и датчик 8 усилий.
Кроме этого в устройство входят блок 9 задания положения объекта, блок 10 координат силоиозбудителей, блок 11 стабилизации положения объекта, блок 12 пространственного масштабирования, состоящий из узлов 13 коррекции положения объекта для каждого канала, блок 15 хранения максимальных усилий, блок 14 задания усилий н датчики 16 положения объекта.
Устройство работает следующим образом.
Переменный во времени сигнал заданного уровня нагрузки Pj (процент нагрузки) от блока 14 задания усилий подаегся на входы сумма торов 2 каналов нагружения. Масштабирующие элементы 3, настроенные в соответствии с данными загрузочной таблицы, хранимой в виде значений макси яальных усилий в блоке 15, об(еспечивают воспроизведение требуемых в каждой точке нагрузок. .
Четыре базовых датчика 16 положения объекта, расположенные попарно вдоль размаха крыла и вдоль фюзеляжа, выдают на вход блока П стабилизации сигналы Yi, Yj, YS, Y4, пропорциональные действительному положению объекта. В блоке 11 производится их обработка по следующим зависимостям:
. л:„ Я,
Ч /.-г.
4 Л ., а,
где Н - вертикальное смещение объекта, г - угол крена, а - угол тангажа, а е- база между парными датчиками.
На другие входы блока стабилизации с блока 9 задания положения объекта подаются сигналы заданного положения объекта Но, f о и
Со.
Полученные на выходе блока стабилизации сигналы рассогласования подаются на входы узлов 13 коррекции положения объекта блока 12 пространственного масштабирования.
На вторые входы узлов 13 поступают значения координат с блока 10, отражающие пространственное расположение i-ro силовозбудителя, и производится их умножение на сигналы рассогласования положения объекта. На выходах узлов 13 блока 12 формируются сигналы коррекции, величины которых изменяются по кососимметрнчному закону в зависимости от значения координаты силовозбудителя по размаху крыла и вдоль фюзеляжа. Таким образом с наименьшей погрешностью в отработке заданных усилий достигается компенсация моментов крена, тангажа и вертикального смущения, возникаю1инх от небаланса сил, а также создается возможность перемещения в пространстве объекта под нагрузкой (путем изменения HO, Га. cifl.
Наличие на входе каждого канала нагружения сумматора и масщтабирующего элемента позволяет наложить на заданную эпюру нагружения корректирующие распределенные воздействия для стабилизация объекта в пространстве в процессе нагружения.
Формула изобретения
Устройство программного управления стендом для испытаний образцов и конструкций на прочность, содержащее блок хранения максимальных усилий, узел задания усилий, соединенный с электрогидравлическнми следящими приводами с обратной связью по усилию, включающими входной суяшатор, масштабный
блок, блок выделения сигнала ошибки, усилитель ошибки, электрогидравлический преобразователь, гидравлический силовозбудитель и датчик усилий, отличающееся тем, что, с целью обеспечения статических испытаний незакрепленных конструкций, оно снабжено блоком задання положения объекта, блоком стабилизации положения объекта, блоком пространственного масштабирования, содержащим узел коррекции положения объекта для каждого канала и блок координат снловозбудителей,
прзл этом однн вход блока стабилизации соединен с блоком задания положения объекта, второй вход соединен с датчиками положения объекта, третий вход соединен с блоком задания усилий, а выходы блока стабилизацни соединены со входами всех узлов коррекции
положения, вторые входы которых соединены с блоком координат силовозбудителей, причем, выходы узлов коррекции положения соединены со входами входных сумматоров соответствующих каналов нагружения.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 262452, кл. G.01 N 3/32, 1972.
2.Авторское свидетельство СССР № 339906, кл. G 05 В 19/03. 1974.
;;, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управленияСТЕНдОМ для иСпыТАНий издЕлий НАпРОчНОСТь | 1979 |
|
SU838665A2 |
| Многоканальная следящая система для испытания объектов на прочность | 1979 |
|
SU864052A1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| Система управления для стенда прочностных испытаний | 2017 |
|
RU2661067C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПЛАНЕРА САМОЛЕТА В ПРОСТРАНСТВЕ ПРИ ПРОЧНОСТНЫХ ИСПЫТАНИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2562672C2 |
| СПОСОБ НАГРУЖЕНИЯ СЖАТЫМ ВОЗДУХОМ ФЮЗЕЛЯЖА ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ИСПЫТАНИЯХ НА ВЫНОСЛИВОСТЬ | 2013 |
|
RU2537752C1 |
| СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2587773C2 |
| ГИРОКОМПАС ДЛЯ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2015 |
|
RU2597018C2 |