Изобретение относится к области систем ориентации летательных аппаратов (ЛА), преимущественно беспилотных самолетного типа и ЛА малой авиации.
Для малогабаритных объектов с невысокой стоимостью требуется компактный дешевый навигационный комплекс работоспособный в ночное время и в условиях плохой видимости, в том числе, в процессе проведения маневрирования. При этом вмешательство человека в этот процесс должно быть минимальным, либо исключено совсем. Такой навигационный комплекс должен быть независимым от возможности получения в процессе полета внешних сигналов искусственного происхождения, чтобы перерыв в получении таких сигналов не ставил под угрозу саму возможность продолжения полета.
Известен авиагоризонт дистанционный АГД-1 [1, стр. 108-110, рис. 4.7] - Антонец Е.В., Смирнов В.И., Федосеева Г.А. «Авиационные приборы и навигационно-пилотажные комплексы». Учебное пособие, ч. 1, г. Ульяновск, УВАУ ГА, 2007 г. Он представляет собой гиростабилизированную платформу, предназначенную для определения углов крена и тангажа (термины в соответствии с ГОСТ 20058-80 - [2]) летательного аппарата. В качестве чувствительных элементов применены прецизионные дорогостоящие гироскопы. Несмотря на относительно небольшие величины уходов (порядка 1-2 °/мин, [1, стр. 105]), погрешность измерения углов со временем неограниченно накапливается. Корректировка может быть проведена только на участках прямолинейного полета на постоянной высоте с постоянной скоростью и требует вмешательства экипажа как для поддержания стабильных параметров полета, так и для проведения коррекции. Автономность работы не обеспечивается.
Известно применение для определения углов ориентации бесплатформенных навигационных систем [3, стр. 20-21, рис. 2.1] - Антонец Е.В., Кочергин В.И., Федосеева Г.А. «Приборное оборудование воздушных судов и его летная эксплуатация». Учебное пособие, г. Ульяновск, УВАУ ГА, 2014 г. Такие системы, по сравнению с платформенными, имеют меньшую массу и энергопотребление, а также более низкую стоимость. Но, как и в платформенных гиросистемах, в них не решается главная проблема - неограниченное увеличение (по модулю) ошибки из-за интегрирования ненулей датчиков. Поэтому, несмотря на применение высокоточных датчиков угловых скоростей и линейных ускорений, для проведения корректировки требуются специальные условия полета и вмешательство экипажа. То есть автономность работы также не обеспечивается.
Там же [3, стр. 24] указано, что инерциальная система может комплексироваться с трехосным магнитометром. При этом угол курса определяется с учетом уже известных значений углов тангажа и крена [3, стр. 26, формула (2.6)]. Однако сами углы тангажа и крена могут быть без нарастающей погрешности определены в этой системе только по показаниям акселерометров в условиях прямолинейного полета с постоянной скоростью. При отсутствии этих условий счисление углов ориентации на основании интегрирования их угловых скоростей, получаемых на основании показаний гиродатчиков угловой скорости (ДУС) [3, стр. 23, формула (2.2)], имеет из-за ненулей ДУС нарастающую ошибку (до 360° по модулю даже с учетом периодичности представления угла). В формуле пересчета показаний ДУС в угловые скорости углов ориентации используются углы тангажа и крена, рассчитанные путем интегрирования получаемых угловых скоростей. Автономность работы описанной инерциально-магнитометрической системы не обеспечивается. Время сохранения ею работоспособности при совершении маневров мало (не более 10-15 мин).
Известен также способ, суть которого описана в патенте РФ №2555496 МПК G01C 21/08, G01R 33/02, 2014 г., «Устройство для определения углов пространственной ориентации подвижного объекта» - [4]. В этом бесплатформенном навигационном комплексе помимо трехосного акселерометра и трехосного гиродатчика угловых скоростей применено два трехосных магнитометра с попарно антипараллельными осями чувствительности. Применение двух трехосных магнитометров позволяет снизить ошибки. Однако, достаточно точное определение положения в горизонтальной плоскости, производимое по данным акселерометров, также возможно только при прямолинейном полете при отсутствии ускорений. Используя показания акселерометров, невозможно определить является ли полет горизонтальным с постоянной скоростью, и показания указывают на наличие углов тангажа и/или крена, либо на летательный аппарат действуют ускорения. Автономность работы не обеспечивается. При появлении ускорений счисление углов крена и тангажа производится по данным ДУС. Из-за ненулей в измерениях ДУС ошибки определения углов ориентации начинают постепенно возрастать, увеличивая и ошибки определения магнитного курса [5].
Прототипом заявляемого способа формирования данных об ориентации летательного аппарата (его вариантов) является способ, описанный в [6] -Патент РФ №2258907, МПК G01C 19/44, 2002 г. «Способ и устройство построения невозмущаемой безгироскопной вертикали». Этот способ включает в себя измерения текущих углов отклонения осей связанной системы координат (ССК) от плоскости местного горизонта (вертикали) -тангажа и крена с помощью физического маятника, выполненного в виде двухосного подвеса, возмущенного линейными ускорениями объекта. Причем формирование оценок вышеупомянутых возмущающих линейных ускорений (их северной и восточной составляющих соответственно) осуществляют по данным спутникового навигационного приемника путем численного дифференцирования соответствующих скоростей или способом наименьших квадратов. Пересчитывают эти составляющие в проекции на продольную и вертикальную оси связанной системы координат с использованием курса от системы курсоуказания объекта и вводят непрерывно или дискретно коррекцию в возмущенные этими ускорениями измерения физического маятника, чем достигают построения невозмущенной вертикали (углов тангажа и крена). При этом используют для тангажа и крена расчетные зависимости (обозначения в формулах в соответствии с [6]):
для тангажа 
для крена 
В качестве курсоуказателя (п. 3 формулы изобретения [6]) предлагается использовать трехосный магнитометр (феррозонд). Метод расчета угла курса по показаниям магнитометра в прототипе способа не описан.
Физический маятник с подвесом и средства измерения текущих углов его отклонения (качания) образуют маятниковую систему прототипа.
Недостатком выше перечисленных способов является невозможность обеспечения автономной работы (независимой от возможности получения в процессе полета внешних по отношению к объекту сигналов искусственного происхождения или вмешательства членов экипажа).
Для работы необходимо получать сигналы спутниковой группировки (в общем случае не менее чем от четырех спутников одновременно) и обеспечивать устойчивую работу во всех условиях эксплуатации спутникового навигационного приемника. Сам приемник чувствителен к воздействию внешних искусственных помех. Кроме того, для решения навигационной задачи спутники, с которых принимается сигнал, должны находиться на 10-15° выше линии горизонта объекта. При перерыве связи со спутниками, даже при наличии трехосного магнитометра, определение углов ориентации становится невозможным, так как только по показаниям магнитометра все три угла не могут быть определены [11, стр. 29-32], а углы тангажа и крена, рассчитанные только по углам поворота двухосного маятника, верны лишь в случае прямолинейного полета с постоянной скоростью.
Задача данного изобретения направлена на обеспечении автономной работы навигационного комплекса.
Для этого необходимо обеспечить длительное определение в процессе полета углов ориентации объекта, в пределе ограниченное только временем полета ЛА, с возможными ошибками, не превышающими по модулю 5-10° (2×(СКО), без необходимости вмешательства в процесс членов экипажа и получения извне сигналов искусственного происхождения.
Такие погрешности определения углов ориентации при наличии в автопилоте ЛА, контуров управления по координатам местоположения (не рассматриваемых в материалах настоящей заявки) обеспечивают устойчивость полета объекта по траектории, соответствующей полетному заданию.
Техническим результатом является практически неограниченное время обеспечения автономности функционирования навигационного комплекса.
Также технический результат заключается и в том, что углы ориентации определяются не только в прямолинейном полете с постоянной скоростью, но и при наличии ускорений как в случае выполнения маневров по скорости, так и по углам, и в комбинациях маневров по скорости и углам.
Техническим результатом является возможность определения углов ориентации при ограниченной видимости днем, а также в ночное время суток.
Техническим результатом также является повышение точности формируемых углов ориентации.
Это происходит в результате учета вертикальной компоненты ускорения объекта (по крайней мере десятые доли ускорения силы тяжести), и за счет сглаживания получаемых углов ориентации с подавлением шумов в 5 раз и более в зависимости от соотношения спектров шума и полезного сигнала (возможность сглаживания сигналов в прототипе не предусмотрена).
Указанные технические результаты достигаются реализацией нескольких вариантов способа, связанных единством творческого замысла.
В первом варианте способа формирования данных об ориентации летательного аппарата технические результаты достигаются за счет того, что используют измерения установленных на воздушном объекте трех акселерометров, трех гиродатчиков угловых скоростей, и трехосного магнитометра, оси измерения которых параллельны осям объекта X, Y, Z, и датчика воздушной скорости (ДВС), а также угла отклонения одноосного физического маятника, ось качания которого расположена параллельно поперечной оси (Z) ССК объекта (маятник, его подвес, датчик для измерения угла качания образуют маятниковую систему). Для расчета угла тангажа производится корректировка измеренного значения угла отклонения маятника с учетом значений проекций ускорений на все три оси связанной системы координат объекта. Осуществляется пересчет показаний гиродатчика угловых скоростей в систему координат, в которой измеряют углы ориентации. Расчет угла крена ведется с использованием кинематических зависимостей для движения летательного аппарата в атмосфере, в котором задействуют линейную скорость, полученную на основании измерений датчика воздушной скорости, угловые скорости, пересчитанные в систему координат, в которой измеряют углы ориентации, и рассчитанное значение угла тангажа. Формирование угла курса производят на основании измерений магнитометра и рассчитанных углов тангажа и крена. Значения полученных углов ориентации сглаживают.
Во втором варианте способа формирования данных об ориентации летательного аппарата технические результаты также достигаются и том случае, когда в процессе сглаживания полученных углов ориентации используют угловые скорости, пересчитанные в систему координат, в которой измеряют углы ориентации.
В третьем варианте способа формирования данных об ориентации летательного аппарата технические результаты достигаются также и тогда, когда вместо воздушной скорости, полученной на основании измерений показаний ДВС, используют скорость, полученную, например, на основании полетного задания (задание скорости программным образом).
В четвертом варианте способа формирования данных об ориентации летательного аппарата технические результаты достигаются и в том случае, когда используют как программное значение скорости движения воздушного объекта для формирования углов ориентации, так и значения угловых скоростей, пересчитанных в систему координат, в которой измеряют углы ориентации, для осуществления сглаживания полученных углов ориентации.
Технические результаты достигаются и в частных случаях исполнения, когда:
- формирование угла крена осуществляется с использованием уже сглаженного угла тангажа;
- пересчет угловых скоростей в систему координат, в которой измеряют углы ориентации, осуществляется с использованием уже сглаженных углов тангажа и крена;
- формирование угла курса осуществляется с использованием уже сглаженных углов тангажа и крена;
- при проведении сглаживания с использованием угловых скоростей используют структуру фильтра подобную фильтру Калмана.
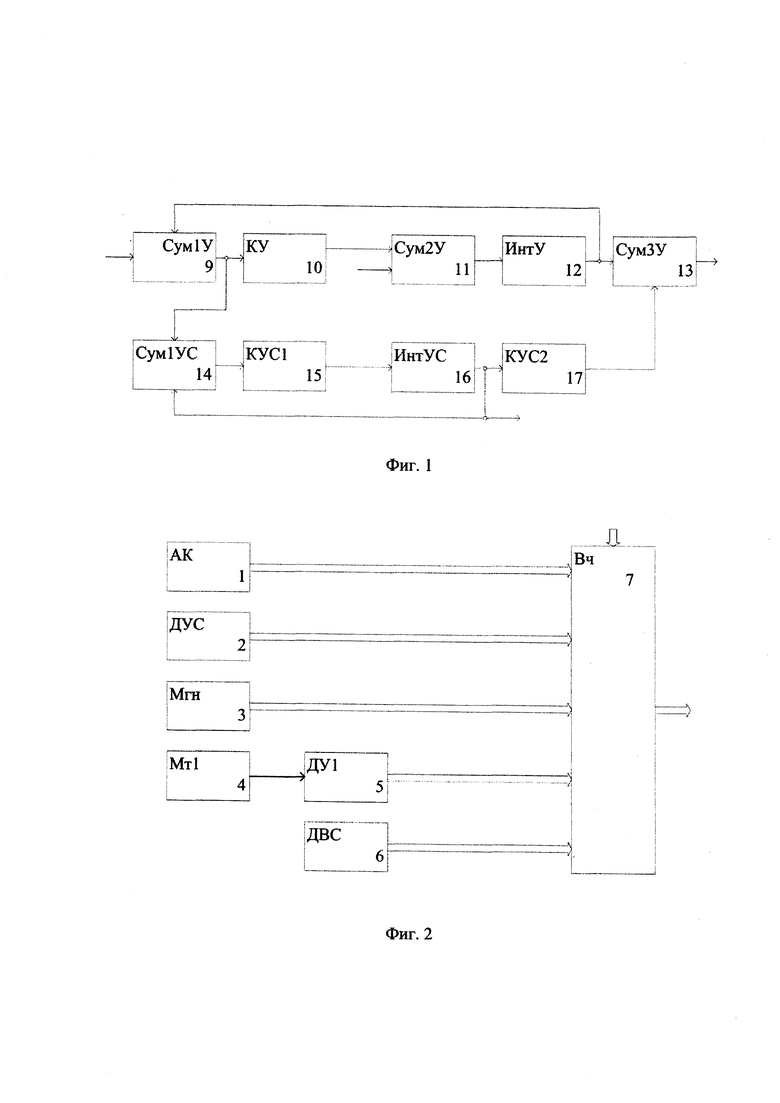
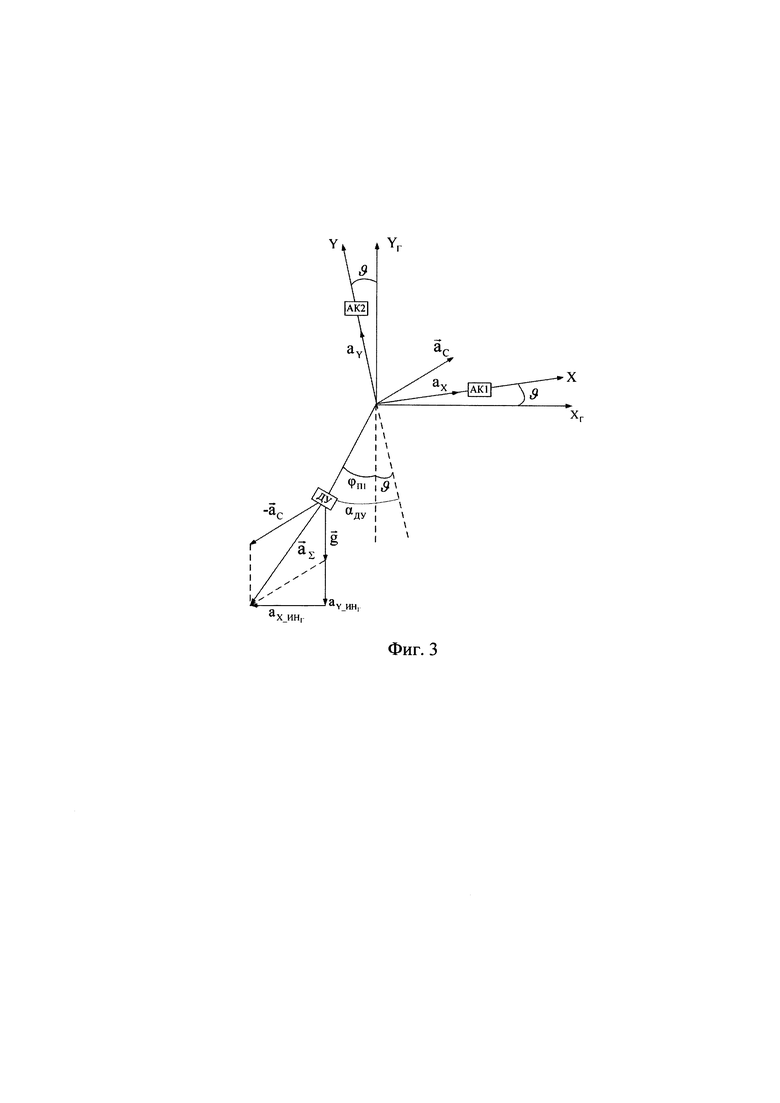
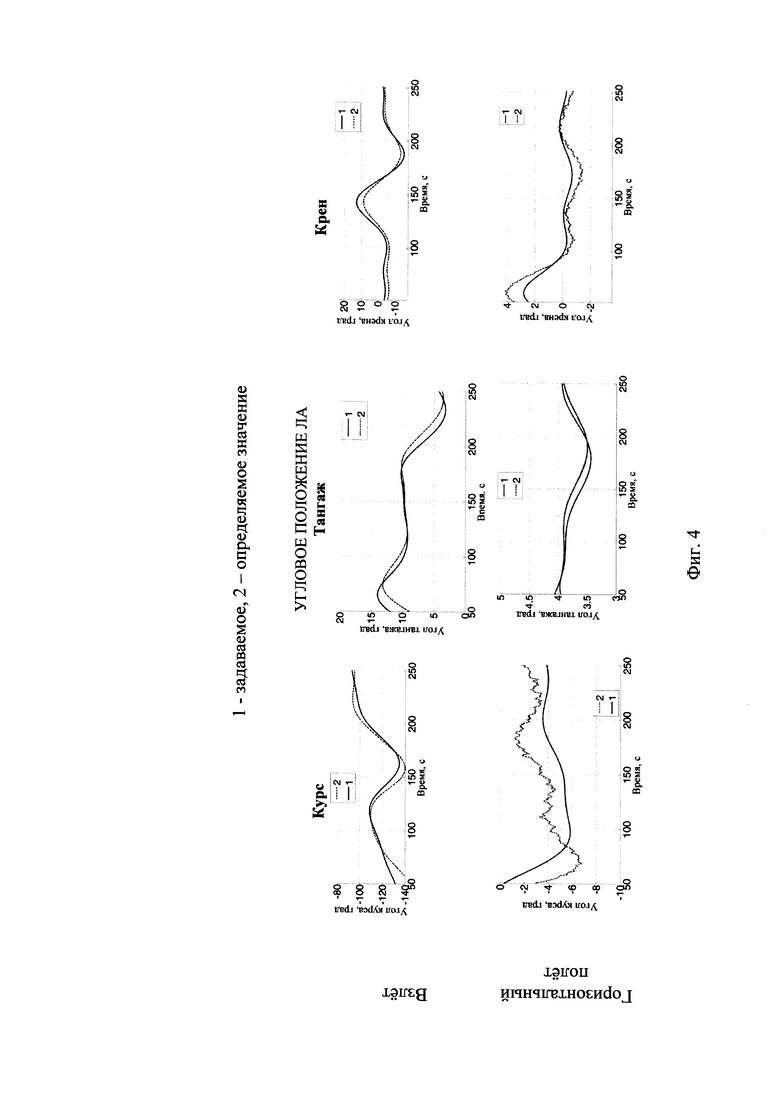
Описание проиллюстрировано следующими графическими материалами: на фиг. 1 приведена структура сглаживающего фильтра, на фиг. 2 - блок-схема навигационного комплекса, на фиг. 3 - положение маятника в связанной системе координат (ССК) (ось Z перпендикулярна плоскости рисунка), на фиг. 4 - результаты моделирования на разных участках полета при программном задании изменения скорости.
Способ (его варианты) реализуется следующим образом.
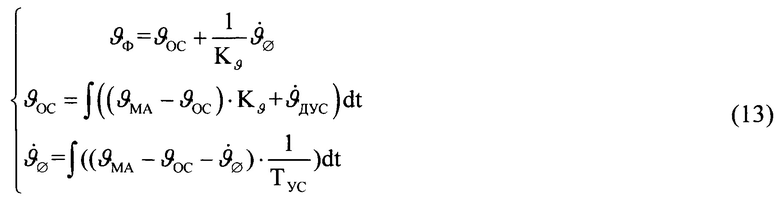
Отказ от измерений положения маятника, ось качания которого параллельна продольной (X) оси ЛА, обусловлен тем, что при выполнении наиболее типового и регламентированного маневра- координированного (правильного) разворота - ускорение в направлении поперечной оси ССК становится нулевым, а установившееся положение маятника в плоскости крена будет стремиться к нулю. Определение угла крена с использованием информации о положении маятника становится невозможным. Поэтому угол крена определяется с учетом кинематических соотношений [10, стр. 294, формула (59.9)] по зависимости (во всех случаях, когда для определения углов используются обратные тригонометрические функции и известны значения и числителя и знаменателя, могут быть также применены функции arcsin, arccos, atan2 [8]):

где λДУС - угол крена, определенный с учетом измерений гиродатчиков угловой скорости;
V - истинная воздушная скорость (воздушная скорость с учетом высоты) для первого и второго вариантов способа или программно задаваемое значение скорости для третьего и четвертого вариантов способа;
g - ускорение силы тяжести;
 - скорости изменения углов курса и тангажа, рассчитанные на основании показаний ДУС (см. (12));
- скорости изменения углов курса и тангажа, рассчитанные на основании показаний ДУС (см. (12));
ϑФ - угол тангажа, сформированный на основании показаний датчика угла качания маятника и акселерометров.
Воздушная скорость может быть непосредственно измерена, рассчитана на основании показаний других систем ЛА (тяги, высоты полета, веса и т.д.) или взято ее значение, сформированное на основании полетного задания. В последнем случае точность определения угла снижается, но ошибка остается конечной (как показано ниже, ошибки расчета угла тангажа и угловых скоростей тангажа и курса ограниченные) и небольшой (на фиг. 4 СКО равно 1-2°), что обеспечивает устойчивость полета ЛА.
В маятниковой системе, использование которой заявитель считает предпочтительным, плоскость качания маятника параллельна плоскости XY связанной системы координат ЛА (фиг. 3). В качестве вспомогательной на фиг. 3 показана плоскость XгYг системы координат XгYгZг, получаемой путем поворота географического трехгранника (земной нормальной системы координат [2] (ЗНСК), продольная ось которой направлена на север) последовательно на углы ψ (вокруг вертикальной оси ЗНСК) и γ (вокруг оси Хг). Третий поворот на угол ϑ (вокруг оси Zг) завершает перевод в ССК ЛА аналогично приведенному в [7, стр. 126, формула (3.23)] для последовательности курс-крен-тангаж (в [14, стр. 24-28] приведены матрицы для 3-х последовательностей углов Эйлера, в материалах по MATLAB указывается на 12 последовательностей). Если начальное и конечное положение систем координат фиксированы, численные значения коэффициентов итоговой матрицы направляющих косинусов для перехода из одного положения в другое не зависят от того, какая последовательность поворотов выбрана. Поэтому углы тангажа и крена взаимосвязаны с углами ϑ и γ, а угол ψ отличается от угла курса ψМ, формируемого с учетом показаний магнитометра.
Из фиг. 3 видно, что:

где αДУ - установившийся угол отклонения маятника от оси Y ССК, измеренный датчиком угла качания (ДУ) маятниковой системы;
ϕП1 - составляющая угла, обусловленная ускорениями ЛА.
Величина ϕП1 вычисляется по известным измерениям акселерометров ax,aY,az (на фиг. 3 акселерометры АК1 и АК2 измеряют соответственно кажущиеся ускорения ах и aY). Для чего определяются абсолютные ускорения в связанной системе координат:


где матрица  -это матрица [7, стр. 126, формула(3.26)] перехода из связанной в земную нормальную систему координат.
-это матрица [7, стр. 126, формула(3.26)] перехода из связанной в земную нормальную систему координат.
Значения абсолютных ускорений в ССК в скалярной форме вычисляются как:

Вычисляются проекции абсолютных ускорений ( ) в связанной СК на оси Земной нормальной системы координат (ЗНСК):
) в связанной СК на оси Земной нормальной системы координат (ЗНСК):


Абсолютные ускорения перепроецируются из Земной нормальной системы в систему координат XГYГZГ, развернутую относительно ЗНСК на углы ψ и γ.


На маятник действуют инерционные силы, которые имеют обратный по сравнению с абсолютными ускорениями знак, тогда к маятнику с учетом веса в системе координат XГYГ приложены следующие ускорения:

Таким образом, угол отклонения ϕП1:

Из (2) с учетом показаний датчика угла качания маятниковой системы и угла, рассчитанного по формуле (11), можно определить угол ϑ. А из углов крена, ϑ и γ - угол тангажа (с величиной возможной ошибки, не превышающей 2-3°).
Угол курса ψМ определяется из показаний магнитометра с использованием углов крена и тангажа (см., например, [3, стр. 26], [11, стр. 41]), поэтому возможная погрешность его определения также не является неограниченной и не превышает 5-10°.
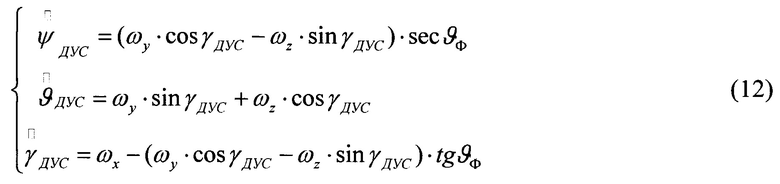
Получаемые расчетные значения углов ориентации сильно зашумлены. Это обусловлено наложением на полезный сигнал из маятниковой системы об отклонении физического маятника как колебаний маятника, так и шумов датчика качания, а также вибрационными шумами акселерометров. Для подавления шумов может использоваться фильтр низких частот (первый и третий варианты способа), а также, в частности, фильтр по принципам построения близкий к фильтру Калмана [7, стр. 221, рис. (5.19)] (второй и четвертый варианты способа). В частности, может быть реализована схема, в которой используются углы ориентации, определенные, например, по приведенным выше зависимостям, и углы ориентации, определенные путем интегрирования угловых скоростей ориентации объекта в замкнутом контуре, где соответствующая угловая скорость является компенсирующим сигналом. В фильтре, в конечном счете, на выходе присутствуют «гладкие» оценки углов по результатам интегрирования угловых скоростей, в которых скорректированы медленно меняющиеся ошибки измерений ДУС. Структура фильтров приведена на фиг. 1. Для вычисления указанных угловых скоростей могут использоваться уравнения, например, вида (12) [7, стр. 127, формула (3.30)], [3, стр. 23, формула (2.2)]:
где  - скорость изменения угла крена, рассчитанная на основании показаний ДУС;
- скорость изменения угла крена, рассчитанная на основании показаний ДУС;
ωх, ωу, ωz - угловые скорости в ССК, измеряемые с помощью ДУС.
Вычисления по (1)-(11) или (1)-12), а также вычисление ψМ, производятся методом последовательных приближений или перебора с фиксированным шагом.
Уравнения для сглаживания сигнала в структуре подобной фильтру Калмана приведены для канала тангажа и могут быть аналогичны для других каналов:
где  ТУС - постоянные времени в контурах сглаживания угла и ошибки угловой скорости соответственно;
ТУС - постоянные времени в контурах сглаживания угла и ошибки угловой скорости соответственно;
 - определяемая погрешность формирования угловой скорости;
- определяемая погрешность формирования угловой скорости;
ϑФ - значение отфильтрованного угла;
ϑMA - значение входного сигнала, например, полученного на основании измерения отклонения маятника и показаний акселерометров.
За счет глубокой фильтрации и использования компенсирующего сигнала по угловой скорости ошибки измерения уменьшаются в пять и более раз. Моделирование, при котором в качестве задаваемых значений использовались телеметрические данные полета самолета МС-21 (фиг. 4), показало, что наибольшие ошибки имеют место в канале курса, со временем они затухают и обусловлены в первую очередь разрывным представлением функции угла. Способы «сшивания» таких кривых известны и применяются при построении фазовых частотных характеристик по экспериментальным данным, а ошибки по курсу непосредственно не влияют на устойчивость ЛА. Уровень ошибок по крену и тангажу обеспечивает устойчивость ЛА в полете, т.к. не превышает ошибок пилотирования, при которых теряется устойчивость полета, и, следовательно, навигацию самолета в автономном режиме.
Таким образом, предложенные варианты способа даже при отсутствии получения какой-либо информации извне от источников искусственного происхождения во время полета и вмешательства членов экипажа в работу (автономность работы), обеспечивают измерение углов магнитного курса, тангажа и крена без нарастающих по модулю ошибок (и, таким образом, продолжительность работы) во всех режимах полета, включая маневрирование. Поэтому работа не требует проведения периодической выставки по углам, тем более с переходом в режим прямолинейного равномерного горизонтального полета, т.е. отсутствует обусловленное методически ограничение по времени нахождения в автономном состоянии. Для работы не требуется наблюдение за ориентирами на местности или небесном своде, то есть обеспечивается работа в условиях ограниченной видимости днем и ночью. Это подтверждает выполнение задачи изобретения.
Преимуществом данного изобретения является также уменьшение нагрузки на членов экипажа пилотируемого ЛА, оснащенного навигационным комплексом, использующим какой-либо из вариантов описанного способа.
Описанный способ реализован в навигационном комплексе летательного аппарата.
Аналогами являются навигационные комплексы [4], [5], [6].
По мнению заявителя изделие с наибольшим числом совпадающих признаков, взятое за прототип навигационного комплекса, описано в [3, стр. 25-27, рис. 2.5] - Антонец Е.В., Кочергин В.И., Федосеева Г.А. «Приборное оборудование воздушных судов и его летная эксплуатация», учебное пособие, г. Ульяновск, УВАУ ГА, 2014 г., состоящее из вычислителя (центральный процессор, устройство вывода, блок управления памятью) и подключенных к нему трехосного магнитометра, трехосного акселерометра и трехосного гиродатчика угловых скоростей.
Недостатком данного устройства является невозможность обеспечения автономной работы.
Оно требует проведения периодической выставки по углам, что может быть осуществлено только на участках прямолинейного полета с вмешательством в процесс экипажа. Это обусловлено тем, что, как уже отмечалось, по измерениям магнитометра три угла ориентации определены быть не могут, интегрирование сигналов ДУС (после преобразования координат) приводит к нарастающей (по модулю) ошибке из-за ненулей, а определение крена и тангажа по показаниям акселерометров, возможно только на участках прямолинейного полета на постоянной высоте с постоянной скоростью.
Задача заключается в обеспечении длительной автономной работы навигационного комплекса.
Для чего нужно обеспечить измерение углов ориентации без нарастающих со временем ошибок (по модулю) при их величине не превышающей 5-10° (2×СКО) без вмешательства в процесс членов экипажа и использования получаемой извне информации от источников искусственного происхождения.
Технический результат заключается в возможности функционирования навигационного комплекса в условиях ограниченной видимости днем и ночью.
Также технический результат заключается в работоспособности навигационного комплекса в процессе выполнения маневров ЛА по углам и скорости.
Предлагаемый навигационный комплекс летательного аппарата лишен указанного выше недостатка прототипа и обеспечивает определение углов ориентации ЛА как при прямолинейном полете, так и при наличии ускорений и проведении ЛА маневров по углам без ограничения по времени в дневное, в том числе в условиях ограниченной видимости, и ночное время без привлечении данных от аппаратуры спутниковой навигации или радиокомпасов и т.п.
Технические результаты достигаются за счет того, что навигационный комплекс содержит вычислитель и подключенные к нему трехосный магнитометр, трехосный акселерометр и трехосный гиродатчик угловых скоростей. Он также содержит маятниковую систему и датчик воздушной скорости. Маятниковая система выполнена на базе одноосного маятника и оснащена датчиком угла качания. Выходы датчиков угла качания и воздушной скорости также подключены к вычислителю. При этом предпочтительно ось качания маятника располагается параллельно поперечной оси объекта.
Полученная совокупность признаков навигационного комплекса является ранее неизвестной.
Вычислитель, трехосные магнитометр, акселерометр и ДУС могут быть взяты такими же как в прототипе. Конструкция одноосной маятниковой системы общеизвестна (в качестве простейших примеров можно рассматривать маятниковые часы или качели). В качестве измерителя (датчика) угла качания могут быть использованы, например, вращающийся трансформатор, потенциометр, магнит и датчик Холла и т.п. Датчик воздушной скорости может быть выполнен, как это описано в [12] или [13].
На фиг. 2 схематически изображен предлагаемый навигационный комплекс. Он состоит из вычислителя 7, к которому подключены блок 1 акселерометров (не менее трех измерителей), блок 2 гиродатчиков угловой скорости (не менее трех измерителей), магнитометр 3 (не менее трех направлений измерения магнитного поля), одноосный маятник 4 и датчик 5 угла качания маятниковой системы и датчик 6 воздушной скорости.
Здесь и далее, если не указано конкретно, каналы связи могут передавать не один, а несколько сигналов параллельно или последовательно. Например, за счет частотного или кодового разделения по одному или нескольким проводам (оптическим линиям связи), вычислители могут быть выполнены как на базе одной вычислительной машины (процессора, контроллера), так и распределенно, при этом все или отдельные составные части в качестве каналов связи могут использовать общую шину (канал), в том числе для двухстороннего (в прямом и обратном направлении) обмена. Данные особенности являются несущественными для заявляемых технических решений. Также несущественным является проведение переформатирования сигнала (смены интерфейса) из одного стандарта в другой (например, в случае, когда тип выходного канала передачи прибора, формирующего сигнал, отличается от типа канала приема прибора, принимающего сигнал) независимо от того, производится это в специализированном блоке или вычислителе, выполняющем и другие операции.
Учитывая итеративность решаемых задач, подразумевается, что вычислитель представляет собой цифровое устройство, поэтому в случае необходимости в соответствующих цепях для приема информации от аналоговых устройств используются аналого-цифровые преобразователи (АЦП), а для передачи сигналов на них - цифро-аналоговые преобразователи (ЦАП).
Датчик воздушной скорости [12] выполнен таким образом, что не только определяет скоростной напор, но и барометрическое давление, соответствующее высоте полета. Это позволяет определять истинную воздушную скорость, углы атаки и скольжения. Вычислитель имеет также вход для связи с внешними системами (например, аппаратурой ЛА, технологической аппаратурой, используемой при проведении калибровок и т.п.).
При описании работы заявляемого навигационного комплекса летательного аппарата принято, что измерительные оси чувствительных элементов направлены параллельно строительным осям ЛА или их показания уже предварительно пересчитаны на эти направления, например по матрицам учета неортогональностей [9, стр. 11, 12].
Аналогично может быть учтено отклонение направления оси, относительно которой качается маятник, от приведенного идеального направления. То есть показания датчика угла качания маятниковой системы, акселерометра, магнитометра и ДУС приведены к ССК ЛА.
Набор измерительных элементов обеспечивает получение всей необходимой информации для применения зависимостей (1)-(12) и расчета ψМ. Соответственно, вычислитель реализовывает эти (включая в соответствующей комбинации и формулы (13)) или аналогичные им расчеты.
Перед полетом необходимые параметры из полетного задания (координаты точки старта, соответствующие ей значения магнитного и гравитационного полей, барометрическое давление, траектория и скорость движения по ней, скорость ветра по предполагаемому маршруту полета и т.п.) вводятся в вычислитель. Для сокращения времени переходных процессов в сглаживающих фильтрах проводится предстартовая калибровка, в процессе которой, например, уточняются девиации магнитометра, параметры акселерометров и ДУС. При отсутствии движения и малых углах тангажа и крена (косинусы углов близки к единице) значения углов тангажа и крена (ϑАК, γАК), получаемые, исходя из показаний акселерометров, могут быть определены через соотношения (модуль вектора показаний акселерометров равен g):


В этих же условиях датчик угла качания маятниковой системы, ось качания маятника которой параллельна поперечной оси ЛА, должен показать угол тангажа (с учетом крена γАК). Это позволяет убрать ранее неучтенные ошибки из показаний датчика угла качания. С учетом углов крена и тангажа, магнитного склонения и наклонения определяется начальный курс по магнитометру.
Результаты калибровки вводятся в вычислитель.
С началом движения углы ориентации перестают быть постоянными, угловые скорости и линейные ускорения становятся ненулевыми. Вычислитель 7 переходит на расчет значений углов ориентации, например ψМ, ϑMA, γдус с применением зависимостей (1)-(11). Полученные значения сглаживаются. Это может быть сделано с использованием, например, фильтров Чебышева, Баттерворта и т.п. Если в процессе сглаживания используются угловые скорости изменения углов ориентации, применяются зависимости (1)-(12) или в частном случае использования сглаживающего фильтра со структурой, изображенной на фиг. 1, зависимости (1)-(13). При этом получаемые углы ориентации не являются результатом прямого интегрирования сигналов угловых скоростей и линейных ускорений, поэтому погрешности углов ориентации не растут неограниченно. Для определения угла крена по формуле (1) используют значение истинной воздушной скорости, получаемое на основании информации, снимаемой с датчика 6 воздушной скорости.
На фиг. 1 приведена функциональная схема фильтра, соответствующего зависимостям (13), для одного из каналов. Он работает следующим образом.
На первый вход первого сумматора 9 контура угла(СумУ1) поступает зашумленное значение сигнала, например угла тангажа ϑМА. На второй вход сумматора 9 поступает значение предварительной оценки (ϑОС для канала тангажа) сглаженного угла с выхода интегратора 12 контура угла (ИнтУ). В сумматоре 9 находится их разность, которая с выхода Сум1У подается на вход блока 10 коэффициента контура угла (КУ) и первый вход сумматора 14 контура определения смещения угловой скорости (Сум1УС). С выхода КУ 10 усиленный сигнал поступает на первый вход второго сумматора 11 контура угла (Сум2У). На второй вход Сум2У поступает угловая скорость соответствующего угла ( для канала тангажа), рассчитанная в вычислителе, например по зависимости (12) или другой зависимости, которая напрямую не связана с взятием производной от фильтруемого зашумленного сигнала угла. Полученная в Сум2У сумма с его выхода поступает на вход ИнтУ 12, где интегрируется. Выход ИнтУ помимо Сум1У соединен с первым входом третьего сумматора 13 контура угла (Сум3У).
для канала тангажа), рассчитанная в вычислителе, например по зависимости (12) или другой зависимости, которая напрямую не связана с взятием производной от фильтруемого зашумленного сигнала угла. Полученная в Сум2У сумма с его выхода поступает на вход ИнтУ 12, где интегрируется. Выход ИнтУ помимо Сум1У соединен с первым входом третьего сумматора 13 контура угла (Сум3У).
Второй вход Сум1УС 14 соединен с выходом интегратора 16 контура определения смещения угловой скорости (ИнтУС). Значение сигнала с выхода ИнтУС ( для канала тангажа) соответствует погрешности формирования угловой скорости. В сумматоре 14 контура определения смещения угловой скорости формируется разность входных величин, подающаяся с его выхода на вход первого блока 15 коэффициента контура определения смещения угловой скорости (КУС1). Усиленное значение сигнала поступает с выхода КУС1 на вход ИнтУС 16, где интегрируется. Выход ИнтУС помимо Сум1УС соединен со входом второго блока 17 коэффициента контура определения смещения угловой скорости (КУС2). После масштабирования в КУС2 сигнал с его выхода подается на второй вход третьего сумматора 13 контура угла. Просуммированные в Сум3У сигналы формируют на его выходе уточненную оценку сглаженного угла (ϑФ для канала тангажа).
для канала тангажа) соответствует погрешности формирования угловой скорости. В сумматоре 14 контура определения смещения угловой скорости формируется разность входных величин, подающаяся с его выхода на вход первого блока 15 коэффициента контура определения смещения угловой скорости (КУС1). Усиленное значение сигнала поступает с выхода КУС1 на вход ИнтУС 16, где интегрируется. Выход ИнтУС помимо Сум1УС соединен со входом второго блока 17 коэффициента контура определения смещения угловой скорости (КУС2). После масштабирования в КУС2 сигнал с его выхода подается на второй вход третьего сумматора 13 контура угла. Просуммированные в Сум3У сигналы формируют на его выходе уточненную оценку сглаженного угла (ϑФ для канала тангажа).
Предлагаемая структура фильтрации позволяет за счет отрицательной обратной связи по оценке сглаженного угла перейти к ограниченному значению ошибки из-за ненуля в сигнале угловой скорости. Отрицательная обратная связь в контуре определения смещения угловой скорости позволяет получить несмещенное значение этой ошибки (контур имеет астатизм первого порядка) и скомпенсировать ее в Сум3У. При этом сглаживание угла и определение ненуля угловой скорости осуществляется одновременно.
Полученные значения сглаженных углов могут использоваться вычислителем как для определения скоростей изменения углов ориентации, так и значений истинных ускорений, крена и магнитного курса для уменьшения зашумленности результатов промежуточных вычислений.
Таким образом, за счет реализации в навигационном комплексе ЛА вариантов способа формирования данных об ориентации объекта, описанных выше, заявляемый комплекс обладает следующими преимуществами:
- является автономным, так как для его функционирования не требуется ни получения извне информации от источников искусственного происхождения, ни вмешательства во время полета в процесс работы членов экипажа ЛА;
- способен работать длительное время, т.к. формируемые углы ориентации имеют ограниченные (по модулю) ошибки, которые не нарастают со временем;
- обеспечивает работу навигационного комплекса в любое время суток, т.к. в составе измерительных элементов отсутствуют такие, работа которых требует наблюдения за ориентирами на земной поверхности или небесной сфере;
- повышает точность (СКО, в пять и более раз) определения углов ориентации за счет сглаживания как при осуществлении промежуточных расчетов, так и конечных результатов вычислений.
Преимуществом заявляемого навигационного комплекса летательного аппарата также является снижение нагрузки на экипаж пилотируемого ЛА во время полета, поскольку его членам не приходится заниматься периодической корректировкой измерительных элементов.
Из изложенного видно, что навигационный комплекс летательного аппарата является новым, технически реализуемым и обеспечивает достижение заявленных технических результатов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1 Антонец Е.В., Смирнов В.И., Федосеева Г.А. «Авиационные приборы и навигационно-пилотажные комплексы». Учебное пособие, ч. 1, г. Ульяновск, УВАУГА, 2007 г. - 119 с. http://venec.ulstu.ru/lib/disk/2014/Antonets_1_.pdf
2 ГОСТ 20058-80. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения.
3 Антонец Е.В., Кочергин В.И., Федосеева Г.А. «Приборное оборудование воздушных судов и его летная эксплуатация». Учебное пособие, г. Ульяновск, УВАУГА, 2014 г. - 62 с. http://venec.ulstu.ru/lib/disk/2015/Antonets_2.pdf
4 Патент РФ №2555496 МПК G01C 21/08, G01R 33/02, 2014 г.
5 Туктарёв Н.А. и др. «Автономное инерциально-магнитометрическое устройство определения углов ориентации летательного аппарата», -М: Труды МАИ. Выпуск №88, 2016 г.
6 Патент РФ №2258907, МПК G01C 19/44, 2002 г.
7 Матвеев В.В., Распопов В.Я. «Основы построения бесплатформенных инерциальных навигационных систем» - СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009 г. - 280 с.
8 Функция ATAN2 http://old.exponenta.ru/soft/MATLAB/potemkin/book2/chapter6/contens.asp.
9 Драницына Е.В. «Калибровка измерительного модуля прецизионной БИНС на волоконно-оптических гироскопах». Диссертация на соискание ученой степени кандидата технических наук, - СПб., Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики, 2016 г. - 89 с.
10 Остославский И.В., Стражева И.В. «Динамика полета. Траектории летательных аппаратов», 2-е изд. - М., «Машиностроение», 1969 г. - 499 с.
11 Силкин А.А. «Синтез и анализ алгоритмов определения пространственной ориентации беспилотной аэродинамической платформы по измерениям магнитного поля Земли». Диссертация на соискание ученой степени кандидата технических наук, - М., Институт машиноведения им. А.А. Благонравова РАН, 2002 г. - 104 с.
12 Датчики авионики / ТЕМА 10, https://studfile.net/preview/942822/ Уфимский Государственный Авиационный Технический Университет, 2014 г.
13 Сычёв В. «Лазерные датчики на самолетах заменят пневматические» https://yandex.ru/turbo?text=https%3A%2F%2Fnplus1.ru%2Fnews%2F2016%2F08%2F23%2Ftrueairspeed, 2016 г.
14 «Разработка управляющих программ промышленных роботов». Курс лекций, - Минск, Белорусский государственный университет информатики и радиоэлектроники, 2008 г. - 131 с. https://www.bsuir.by/m/12_113415_1_70397.pdf
| название | год | авторы | номер документа |
|---|---|---|---|
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| РЕЗЕРВНАЯ СИСТЕМА ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ ВЫСТАВКИ ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2551710C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
Заявляемые способы формирования данных об ориентации летательного аппарата и навигационный комплекс летательного аппарата относятся к области систем ориентации летательных аппаратов (ЛА), преимущественно беспилотных самолетного типа и ЛА малой авиации. Сущность данного технического решения заключается в том, что в первом способе формирования данных об ориентации ЛА используют измерения установленных на ЛА трех акселерометров, трех гиродатчиков угловых скоростей и трехосного магнитометра, оси измерения которых параллельны осям ЛА X, Y, Z, и датчика воздушной скорости, а также угла отклонения маятниковой системы, ось качания которой расположена параллельно поперечной оси (Z) связанной системы координат ЛА. Во втором способе в процессе сглаживания полученных углов ориентации используют угловые скорости, пересчитанные в систему координат, в которой измеряют углы ориентации. В третьем способе используют скорость, полученную, например, на основании полетного задания (задание скорости программным образом). В четвертом способе используют как программное значение скорости движения ЛА для формирования углов ориентации, так и значения угловых скоростей, пересчитанных в систему координат, в которой измеряют углы ориентации, для осуществления сглаживания полученных углов ориентации. Данные способы реализуются при помощи навигационного комплекса ЛА, который содержит: вычислитель, акселерометр, гиродатчик угловых скоростей, маятниковую систему, состоящую из маятника, который оснащен датчиком угла качания, и датчик воздушной скорости. Технический результат – обеспечение автономности функционирования навигационного комплекса ЛА во время полета. 5 н. и 7 з.п. ф-лы, 4 ил.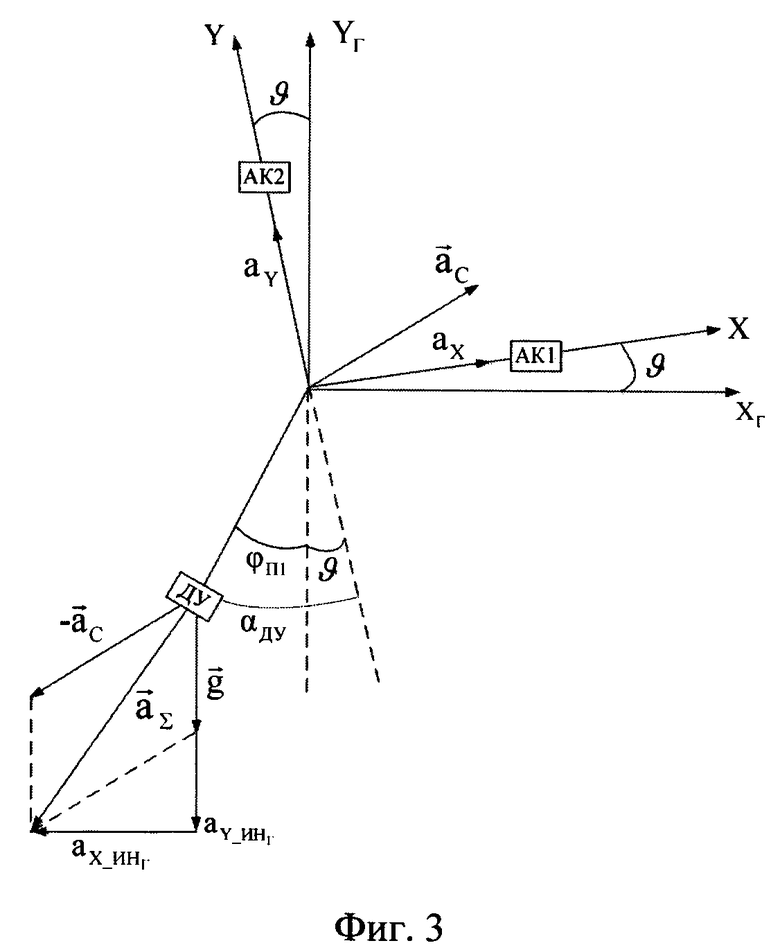
1. Способ формирования данных об ориентации летательного аппарата, в котором измеряют показания угла отклонения маятниковой системы и корректируют их с учетом значений проекций ускорений на продольную и поперечную оси связанной системы координат, рассчитывают углы тангажа и крена, используют в качестве третьего угла ориентации угол курса, формируемый на основании показаний трехосного магнитометра, отличающийся тем, что маятниковая система выполнена с использованием одноосного маятника, для корректировки ее показаний используют не только продольные и поперечные, но и вертикальные проекции ускорения в связанной системе координат, которые формируют на основании измерений выходных сигналов трехосного акселерометра, используют для формирования угла крена кинематические зависимости для движения объекта в атмосфере, учитывающие линейную скорость объекта, угол тангажа и скорости изменения углов курса и тангажа, при этом измеряют показания трехосного гиродатчика угловых скоростей, пересчитывают показания гиродатчика угловых скоростей в систему координат, в которой измеряют углы ориентации, а линейную скорость движения объекта формируют с использованием результатов измерений датчика воздушной скорости, и используют для формирования угла курса значение угла тангажа, рассчитанное на основании показаний акселерометра и измеренного положения маятника, и значение угла крена, полученное с использованием результатов измерений датчика воздушной скорости и гиродатчика угловых скоростей, а полученные значения углов ориентации подвергают сглаживанию.
2. Способ формирования данных об ориентации летательного аппарата, в котором измеряют показания угла отклонения маятниковой системы и корректируют их с учетом значений проекций ускорений на продольную и поперечную оси связанной системы координат, рассчитывают углы тангажа и крена, используют в качестве третьего угла ориентации угол курса, формируемый на основании показаний трехосного магнитометра, отличающийся тем, что маятниковую систему выполняют с использованием одноосного маятника, а для корректировки ее показаний используют не только продольные и поперечные, но и вертикальные проекции ускорения в связанной системе координат, которые формируют на основании измерений выходных сигналов трехосного акселерометра, используют для формирования угла крена кинематические зависимости для движения объекта в атмосфере, учитывающие линейную скорость объекта, угол тангажа и скорости изменения углов курса и тангажа, при этом измеряют показания трехосного гиродатчика угловых скоростей, пересчитывают показания гиродатчика угловых скоростей в систему координат, в которой измеряют углы ориентации, а линейную скорость движения объекта формируют с использованием результатов измерений датчика воздушной скорости, используют для формирования угла курса значение угла тангажа, рассчитанное на основании показаний акселерометра и измеренного положения маятника, и значение угла крена, полученное с использованием результатов измерений датчика воздушной скорости и гиродатчика угловых скоростей, осуществляют сглаживание полученных углов ориентации с использованием угловых скоростей, пересчитанных в систему координат, в которой измеряют углы ориентации.
3. Способ формирования данных об ориентации летательного аппарата, в котором измеряют показания угла отклонения маятниковой системы и корректируют их с учетом значений проекций ускорений на продольную и поперечную оси связанной системы координат, рассчитывают углы тангажа и крена, используют в качестве третьего угла ориентации угол курса, формируемый на основании показаний трехосного магнитометра, отличающийся тем, что маятниковую систему выполняют с использованием одноосного маятника, а для корректировки ее показаний используют не только продольные и поперечные, но и вертикальные проекции ускорения в связанной системе координат, которые формируют на основании измерений выходных сигналов трехосного акселерометра, и используют для формирования угла крена кинематические зависимости для движения объекта в атмосфере, учитывающие линейную скорость объекта, угол тангажа и скорости изменения углов курса и тангажа, при этом измеряют показания трехосного гиродатчика угловых скоростей и пересчитывают их в систему координат, в которой измеряют углы ориентации, а линейную скорость движения объекта формируют на основании полетного задания, используют для формирования угла курса значение угла тангажа, рассчитанное на основании показаний акселерометра и измеренного положения маятника, и значение угла крена, полученное с использованием воздушной скорости и гиродатчика угловых скоростей, а полученные значения углов ориентации подвергают сглаживанию.
4. Способ формирования данных об ориентации летательного аппарата, в котором измеряют показания угла отклонения маятниковой системы и корректируют их с учетом значений проекций ускорений на продольную и поперечную оси связанной системы координат, рассчитывают углы тангажа и крена, используют в качестве третьего угла ориентации угол курса, формируемый на основании показаний трехосного магнитометра, отличающийся тем, что маятниковую систему выполняют с использованием одноосного маятника, а для корректировки ее показаний используют не только продольные и поперечные, но и вертикальные проекции ускорения в связанной системе координат, которые формируют на основании измерений выходных сигналов трехосного акселерометра, используют для формирования угла крена кинематические зависимости для движения объекта в атмосфере, учитывающие линейную скорость объекта, угол тангажа и скорости изменения углов курса и тангажа, при этом измеряют показания трехосного гиродатчика угловых скоростей, пересчитывают показания гиродатчика угловых скоростей в систему координат, в которой измеряют углы ориентации, а линейную скорость движения объекта формируют на основании полетного задания, и используют для формирования угла курса значение угла тангажа, рассчитанное на основании показаний акселерометра и измеренного положения маятника, и значение угла крена, полученное с использованием воздушной скорости и гиродатчика угловых скоростей, осуществляют сглаживание полученных углов ориентации с использованием угловых скоростей, пересчитанных в систему координат, в которой измеряют углы ориентации.
5. Способ формирования данных об ориентации летательного аппарата по пп. 1-4, отличающийся тем, что ось качания одноосного маятника параллельна поперечной оси летательного аппарата.
6. Способ формирования данных об ориентации летательного аппарата по пп. 1-4, отличающийся тем, что трехосный акселерометр, трехосный гиродатчик угловых скоростей и датчик воздушной скорости установлены на летательном аппарате.
7. Способ формирования данных об ориентации летательного аппарата по п. 1, или 2, или 3, или 4, отличающийся тем, что для формирования угла крена используют сглаженное значение угла тангажа.
8. Способ формирования данных об ориентации летательного аппарата по п. 1, или 2, или 3, или 4, отличающийся тем, что для формирования угла курса используют сглаженные значения углов тангажа и крена.
9. Способ формирования данных об ориентации летательного аппарата по п. 1, или 2, или 3, или 4, отличающийся тем, что в систему координат, в которой измеряют углы ориентации, показания гиродатчика угловых скоростей пересчитывают с использованием сглаженных значений углов тангажа и крена.
10. Способ формирования данных об ориентации летательного аппарата по п. 2 или 4, отличающийся тем, что при проведении сглаживания сигнала в одном, нескольких или всех каналах из входного сигнала вычитают его предварительную оценку, масштабируют полученную разность и добавляют к ней соответствующую угловую скорость, полученную после пересчета показаний гиродатчика угловых скоростей в систему координат, в которой измеряют углы ориентации, интегрируют эту сумму для получения предварительной оценки входного сигнала, из разности входного сигнала и его предварительной оценки вычитают значение оценки смещения угловой скорости, полученной после пересчета показаний гиродатчика угловых скоростей в систему координат, в которой измеряют углы ориентации, масштабируют полученную разность и интегрируют результат для получения оценки смещения угловой скорости, полученной после пересчета показаний гиродатчика угловых скоростей в систему координат, в которой измеряют углы ориентации, для уточнения значения сглаженного сигнала оценку смещения угловой скорости, полученной после пересчета показаний гиродатчика угловых скоростей в систему координат, в которой измеряют углы ориентации, масштабируют и прибавляют полученную величину к предварительной оценке входного сигнала.
11. Навигационный комплекс летательного аппарата, содержащий вычислитель и подключенные к нему трехосные магнитометр, акселерометр и гиродатчик угловых скоростей, отличающийся тем, что дополнительно на летательный аппарат установлены датчик воздушной скорости и выполненная одноосной маятниковая система, оснащенная датчиком угла качания, при этом выходы датчиков угла качания и воздушной скорости подключены к вычислителю.
12. Навигационный комплекс летательного аппарата по п. 11, отличающийся тем, что ось качания маятника параллельна поперечной оси летательного аппарата.
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 1998 |
|
RU2130588C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2348011C1 |
| US 7418364 B1, 26.08.2008. | |||

