1
Изобретение относится к испытательной технике, а именно к многока нальным следящим системам для испытания объектов на прочность, и может быть использовано в авиационной про мышленности.
Известна многоканальная следящая система для испытания объектов на прочность, содержащая прогреиимный задатчик усилий , электрогидравлический следящий привод , включающий интегратор, сумматоры, функциональный преобразователь D-l
Однако общий коэффициент усиления каждого канала известной системы имеет заниженное значение , что повышает устойчивость, но снижает точность результатов испытаний. Кроме того, при смене объекта испытаний, система требует переналадки параметров следящего привода.
Наиболее близкой к изобретению по технической сущности является vsaoгоканальная следящая система для испытания объектов на прочность, содержащая в каждом канале программный задатчик усилий, электрогидравлический следящий привод, включающий последовательно соединенные первый блок сравнения, первый вход которого подключен к программному задатчику усилий , усилитель, электрогидравлический преобразователь, гидравлический силовозбудитель и датчик усилий, выход которого подключен ко второму входу блока сравнения, и блок коррекции, включающий второй блок сравнения и подк.шоченный к его выходу регулируе1 ый усилитель Г2 .
Ш
Система позволяет проводить программные испытания на прочность с учетом жесткости объекта,однако возмущение, соседних каналов в системе не коштенсируется. Коэффициент усиления каждого канала имеет заниженное значение, что также снижает точность результатов испытаний. Кроме того/ известная система не позволяет компенсировать параметрические возмуще20ния электрогидравлического привода: вариации давления в гидромагистрали, нагрев гидравлической жидкости, KOTfoрые повышают погрешности приложения усилий.
25
Цель изобретения - повыиоение достоверности испытаний.
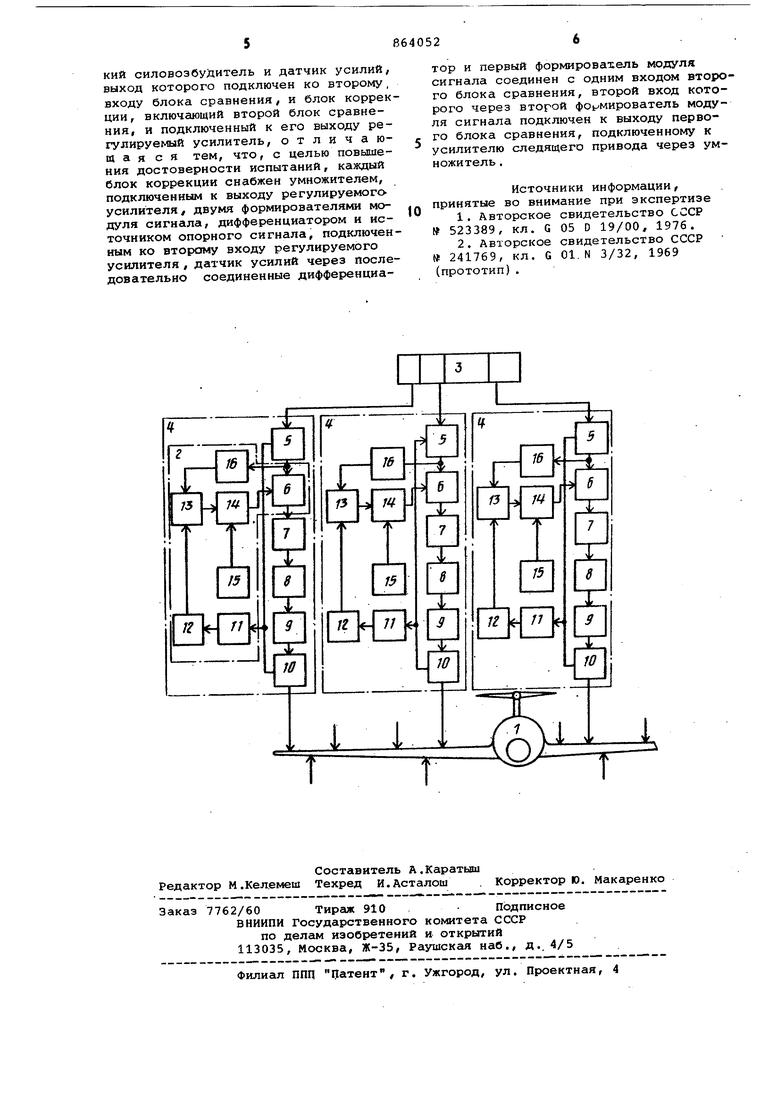
Указанная цель достигается тем, что каяодый блок коррекции снабжен умножителем, подключенным к выходу 30 регулируемого усилителя, двумя формирователями модуля сигнала, дифференциатором и источником опорного сигнала , подключенным ко второму входу регулируемого усилителя, датчик усилий через последовательно соединенные дифференциатор и первый формирователь мо;5уля сигнала соединен с од-, ним входом второго блока сравнения, . второй вход которого через второй формирователь модуля сигнала подключен к выходу первого блока сравнения, подключенному к усилителю следящего привода через умножитель, На чертеже представлена блок-схема предлагаемой многоканальной системы. Система для испытания объекта 1 содержит в каждом канале блок 2 коррекции, программный задатчик 3 усилий электрогидравлический следящий привод 4,включающий последовательно соединен ные первый блок 5 сравнения, умножитель б , усилитель 7, электрогидравлический преобразователь 8, гидравлический силовозбудитель 9 и датчик 10 усилий, подключенный ко входу дифференциатора 11, который через первый формирователь 12 модуля сигнала подключен ко входу второго блока 13 срав нения , к выходу которого подключен управляемый усилитель 14, ко второму входу которого подключен источник 15 опорного сигнала выход управляемого усилителя 14 подключен ко входу умно жителя 6 , выход первого блока 5 срав нения через второй формирователе 16 модуля сигнала подключен ко входу вт рого блока 13 сравнения, ) Элементы блок-схемы обозначенные позициями 6, 11, 12, 13, 14, 15, 16 образуют блок 2 коррекции, Электрогидравлический следящий привод 4, блок 2 коррекции и соответствующий программный задатчик 3 усилий образуют канал нагружения. Система работает следующим образом. В программном задатчике 3 усилий устанавливается для каждого канала нагружения сигнал заданного уровня нагрузки. Сформированный сигнал пода ется на вход блока 5 сравнения. С вы хода . датчика 10 усилий подается сиг нал на второй вход блока 5 сравнения в котором формируется сигнал ошибки, равный разности сигнала с программно го эадатчика 3 усилий и напряжения обратной связи, сигнал ошибки поступает затем на первый вход умножителя 6. На второй вход умножителя 6 с выхода управляемого усилителя 14 пос тупает сигнал адаптации для автомати ческого управления общим коэффициентом передачи данного электрогидравли ческого следящего привода 4. Напряже ние с выхода датчика 10 усилий подается также и на вход дифференциатора 11. Выходной сигнал дифференциато ра 11, представляющий собой производ ную по времени от поступившего входного, поступает на вход формирователя 12 модуля. Одновременно на вход второго формирователя 16 поступает сигнал ошибки. В обоих формирователях 12 и 16 сигналы преобразуются в сигналы одной полярности, после чего поступают на входы блока 13 сравнения. С выхода блока 13 сигнал поступает на управляющий вход усилителя 14, коэффициент передачи которого изменяется под воздействием управляющего входного сигнала. При этом величина выходного напряжения усилителя 14, на второй вход которого поступает постоянное напряжение с выхода источника 15 опорного напряжения, меняется в соответствии с изменениями его коэффициента передачи. При уменьшении жесткости объекта быстродействие электрогидравлического следящего привода 4 уменьшается, скорость нарастания иэмеряемого датчиком 10 усилия понижается. Это вызывает уменьшение выходного сигнала дифференциатора 11 и соответственно уменьшение выходного сигнала формирователя 12. Выходное напряжение блока 13, работающего в ключевом режиме, при этом скачком возрастает и поступает на управляющий вход усилителя 14, изменяя его коэффициент передачи. Изменение коэффициента передачи осуществляется в этом случае таким образом, что выходное напряжение управляемого усилителя 14 , поступающее на второй вход умножителя 6, нарастает с заданной постоянной времени , стремясь к величине опорного напряжения, поступающего на второй вход усилителя 14 с выхода источника 15 опорного напряжения. При поступлении возрастающего до величины опорного напряжения сигнала на второй вход умножителя 6, на первый вход которого поступает сигнал ошибки, общий коэффициент передачи электрогидравлического следящего привода 4 соответствеино возрастает , что приводит к увеличеншо точности нагружения объекта 1 испытаний и, ё результате, к повышению точиости определения характеристик его прочности. Формула изобретения Многоканальная следящая система для испшания объектов иа прочность, содержащгш в каждом канале программный задатчик усилий, электрогидравлический следящий привод, включающий последовательно соединенные первый блок сравнения, первый вход которого подключён к программному эадатчику усилий, усилитель, электрогидравлический преобразователь, гидравлический силовозбудитель и датчик усилий/ выход которого подключен ко второму, входу блока сравнения, и блок коррекции , включающий второй блок сравнения, и подключенный к его выходу регулируемый усилитель, о т л и ч а ющ а я с я тем, что, с целью повышения достоверности испытаний, каждый блок коррекции снабжен умножителем, подключенным к выходу регулируемогоусилителя , двумя формирователями модуля сигнала, дифференциатором и источником опорного сигнала, подключенным ко второму входу регулируемого усилителя , датчик усилий через последовательно соединенные дифференциатор и первый формирователь модуля сигнала соединен с одним входом второго блока сравнения, второй вход которого через второй формирователь модуля сигнала подключен к выходу первого блока сравнения, подключенному к усилителю следящего привода через умножитель .
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 523389, кл. G 05 D 19/00, 1976.
2.Авторское свидетельство СССР 241769, кл. G 01. N 3/32, 1969 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управленияСТЕНдОМ для иСпыТАНий издЕлий НАпРОчНОСТь | 1979 |
|
SU838665A2 |
| Устройство для автоматического нагружения конструкций при испытаниях на прочность | 1988 |
|
SU1504562A1 |
| Автоматическая система нагружения | 1988 |
|
SU1525353A1 |
| Устройство программного управления стендом для испытаний образцов и конструкций на прочность | 1976 |
|
SU607185A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Многоканальная следящая система | 1974 |
|
SU523389A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ К СТЕНДУ | 1969 |
|
SU241769A1 |
ю
т
ff
