1
Изобретение относится к испытательной технике, а именно к устройствам программного управления стендом для испытаний изделий на прочность и можетбыть использовано в авиастроении.
По основному авт.св. tf 607185 известно устройство программного управления стендом для испытаний изделйи на прочность, содержащее блок хранения максимальных усилий, блок задания усилий, соединенный с электрогидравлическими следящими приводами с обратной связью по усилию, включающими входной сумматор, масщтабный блок, блок выделения сигнала ошибки, усилитель ошибки, электрогидравлический преобразователь, гидравлический силовозбудитель,датчик усилий, блок задания положения объекта, блок координат силовозбудителей, блок стабилизации положения изделия, блок пространственного масштабирования, состоящий из узлов коррекции положения изделия для каждого канала нагружения и блок координат силовозбудителей, при этом один вход блока стабилизации соединен с блоком задания положения изделия, второй вход соединен с датчиками положения изделия, третий вход соединен с блоком задания усилий, а выходы блока стабилизации соединены со входами всех узлов коррекции положения, вторые входы которых соединены с блоком координат силовозбудителей, причем выходы узлов коррекции положения соединены со входами входных сумматоров соответствующих каналов
0 нагружения.
Данное устройство обеспечивает многоканальное программное нагружение изделий.
Сигналы датчиков положения посту5пают в блок стабилизации, где сравниваются с сигналами заданного положения. На выходе блока стабилизации появляются сигналы, пропорциональные- рассогласованию сигналов задан0ного и действительного положения конструкции. Блоком пространственного масштабирования формируются сигналы, которые используются для коррекции положения конструкции. Чем больше
5 разбаланс внешних сил, тем при большем смещении конструкции от заданного начального положения будут достигнуты необходимые для уравновешивания величины корректирующих сигналов 1.
0
Однако сигналы блока стабилизации ожно подавать только на группы силоозбудителей, оказывающих на контрукцию одноименное возде11ствие по epeMemetiHro. Это снижает точность оспроизведения прикладываемых в процессе испытаний нагрузок на конструкцию и повышает погрешность в нагрузках от корректирующих воздействий истемы стабилизации положения конструкции .
Кроме того, устройство не позволяет в отдельных случаях, исключить один или несколько каналов из системы стс1билизации .
Цель изобретения - повышение точности воспроизведения нагрузки.
Указанная цель достигается тем, что устройство снабжено инверторами, подключенными к выходу блока стабилизации, и, в каждом канале нагружения, коммутатором корректирующих сигналов, подключенным входами к выходам блока стабилизации, а выходами - ко входам узла коррекции.
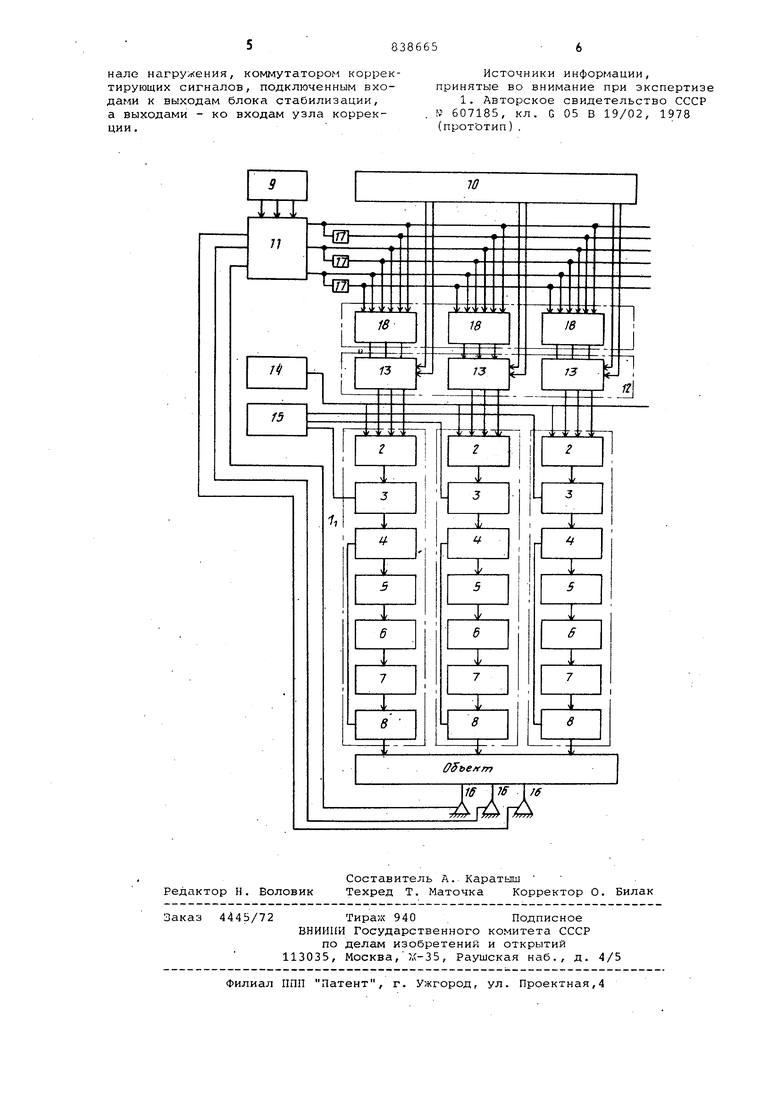
На чертеже представлена блок-схема устройства.
Устройство содержит п следящих приводов 1 с обратной связью по усилию, из которых включает последовательно соединенные входной сумматор 2, масштабирующий блок 3, блок 4 выделения сигнала ошибки, усилитель 5 ошибки, электрогидравлический преобразователь 6, гидравлический силовозбудитель 7 и датчик 8 усилий, блок 9 задания положения объекта, блок 10 координат силовозбудителей, блок 11 стабилизации положения изделия, блок 12 пространственного масштабирования, состоящий из узлов 13 коррекции положения изделия для каждого канала,блок 14 задания усилий, блок 15 хранения максимальных усилий, датчики 16 положения изделия, инверторь.) 17 на выходе блока 11 стабилизации и коммутаторы 18 корректирующих сигналов .
Устройство работает следующим образом.
Переменный во времени сигнал блока 14 задания усилий подается на входы сумматоров 2 каналов нагружения. Масштабирующие блоки 3, настроенные в соответствии с данными загрузочной таблицы, хранимой в виде значений максимальных усилий в блоке 15, обеспечивают воспроизведение требуемых в каждой точке нагрузок.
Четыре базовых датчика 16 положения изделия выдают на блок 11 стабилизации сигналы YJ
Y
4
пропорциональные дe lcтвитeльнoмy по-г ложению объекта. В блоке 11 производится их обработка по следующим зависимостям:
Y г -Н У . и JJ- ,n,
Yz
е
b JL-Y4. к, .,
Ot.
оrV
где Н - вертикальное смещение
об-уекта; - угол крена; cL - угол тангажа; е - база между парными датчиками .
На другие входы блока 11 стабилизации с блока 9 задания положения объекта подаются сигналы заданного положения объекта Н, , с оПри смещении изделия относительн заданного положения, благодаря инверторам 17, на парных шинах появляются синфазные сигналы ±Н - корекции вертикального положения, - cL тангажа и ± Т крена -конструкции. Коммутатор 18 подключает данный канал к соответствующим шинам блока 1 стабилизации, в зависимости от пространственного положения гидравлического силовозбудителя 7 относително изделия. Сигналы с выходов коммутатора 18 поступают на входы узлов 13 коррекции блока 12 пространственного масштабирования .
На вторые входы узлов 13 поступают значения координат с блока 10, отражающие пространственное расположение i-го силовозбудителя 7 и производится их умножение на сигнал рассогласования положения изделия. На выходах узлов 13 блока 12 формируются сигналы коррекции, величины которых изменяются по кococи лмeтpичному закону в зависимости от значения координаты силовозбудителя 7.
Устройство позволяет нагружать, изделие одним из следующих способов уменьшением нагрузки, действующей вверх, увеличением нагрузки,действующей вниз/ одновременным уменьшением нагрузки, действующей вверх и увеличением нагрузки, действующей вниз .
Изобретение повышает точность воспроизведения прикладываемых по программе нагрузок.
Формула изобретения
Устройство програмглного управления стендом для испытаний изделий на прочность по авт.св. № 607185, отличающееся тем, что, с целью повышения точности воспроизведения нагрузки, оно снабжено инверторами, Подключенными к выходу блока стабилизации, и, в каждом канале нагру 1 ения, коммутатором корректирующих сигналов, подключенным входами к выходам блока стабилизации, а выходами - ко входам узла коррекции .
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 607185, кл. G 05 В 19/02, 1978 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления стендом для испытаний образцов и конструкций на прочность | 1976 |
|
SU607185A1 |
| Многоканальная следящая система для испытания объектов на прочность | 1979 |
|
SU864052A1 |
| Устройство для усталостных испы-ТАНий издЕлий | 1978 |
|
SU813192A1 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ КРУПНОМАСШТАБНЫХ КОНСТРУКЦИЙ | 1995 |
|
RU2104508C1 |
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для автоматизированной градуировки датчика силы | 1988 |
|
SU1606889A1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА СТРЕЛОВОГО ТИПА С МАНЕВРОВОЙ СТРЕЛОЙ | 2006 |
|
RU2319656C1 |
| Контурная система программного управления | 1976 |
|
SU568938A1 |
